1. 目的
实现高尔夫球的运动轨迹计算与推测
2. 步骤
- 识别到高尔夫球
- 可以画出或者标定出高尔夫球的运动轨迹
- 根据起飞角、抛物线公式来预测高尔夫球的运动距离
3. 方案
3.1 识别高尔夫球
3.1.1 根据高尔夫球颜色
- 定义高尔夫球的HSV色域空间范围
- resize后的效果:

这一步除了尺寸有变化,其它都和原图一样。
- 高斯滤波后的效果:

滤掉了高频噪音,看着变模糊了。
- 转换到HSV色域后的效果:

- 二值化后的效果:
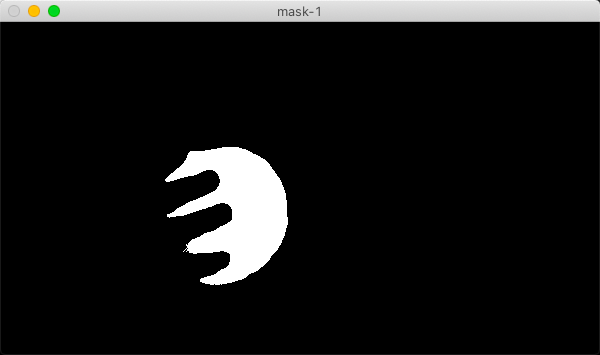
- 腐蚀和膨胀后的效果:

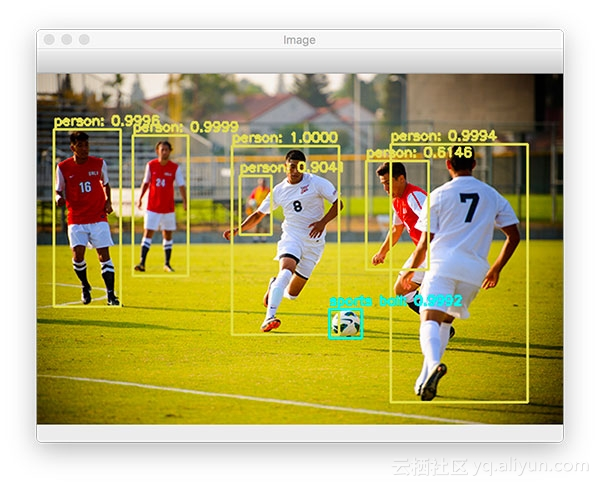
3.1.2 使用yolov3目标检测来检测高尔夫球
3.2 画出或者标定出高尔夫球的运动轨迹
# 寻找轮廓,不同opencv的版本cv2.findContours返回格式有区别,所以调用了一下imutils.grab_contours做了一些兼容性处理cnts = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)cnts = imutils.grab_contours(cnts)center = None# only proceed if at least one contour was foundif len(cnts) > 0:# find the largest contour in the mask, then use it to compute the minimum enclosing circle# and centroidc = max(cnts, key=cv2.contourArea)((x, y), radius) = cv2.minEnclosingCircle(c)M = cv2.moments(c)# 对于01二值化的图像,m00即为轮廓的面积, 一下公式用于计算中心距center = (int(M["m10"] / M["m00"]), int(M["m01"] / M["m00"]))# only proceed if the radius meets a minimum sizeif radius > 10:# draw the circle and centroid on the frame, then update the list of tracked pointscv2.circle(frame, (int(x), int(y)), int(radius), (0, 255, 255), 2)cv2.circle(frame, center, 5, (0, 0, 255), -1)pts.appendleft(center)for i in range(1, len(pts)):# if either of the tracked points are None, ignore themif pts[i - 1] is None or pts[i] is None:continue# compute the thickness of the line and draw the connecting linethickness = int(np.sqrt(args["buffer"] / float(i + 1)) * 2.5)cv2.line(frame, pts[i - 1], pts[i], (0, 0, 255), thickness)cv2.imshow("Frame", frame)
3.3 根据起飞角、抛物线公式来预测高尔夫球的运动距离
- 将离散的轨迹坐标拟合为曲线,从而预测运动参数方法/函数
- 使用最小二乘法拟合运动抛物线
```python
二次函数的标准形式
def func(params, x): a, b, c = params return a x x + b * x + c
误差函数,即拟合曲线所求的值与实际值的差
def error(params, x, y): return func(params, x) - y
对参数求解
def slovePara(): p0 = [10, 10, 10]
p0 = [0.1,-0.01,100]
Para = leastsq(error, p0, args=(X, Y))
return Para
输出最后的结果
def solution():
Para = slovePara()
a, b, c = Para[0]
print(“a=”,a,” b=”,b,” c=”,c)
print (“cost:” + str(Para[1]))
print (“求解的曲线是:”)
print(“y=”+str(round(a,2))+”xx+”+str(round(b,2))+”x+”+str(c))
plt.figure(figsize=(8,6))#创建一个 8 6 点(point)的图
plt.scatter(X, Y, color=”green”, label=”sample data”, linewidth=2) ##画出样本数据
画拟合曲线
x=np.linspace(-10,50,100) ##在-10-50直接画100个连续点
y=axx+b*x+c ##函数式
plt.plot(x,y,color=”red”,label=”solution line”,linewidth=2)
plt.title(“python实现最小二乘法曲线拟合”)
plt.legend() #绘制图例 看拟合效果 plt.show() solution() ```

若有收获,就点个赞吧
0 人点赞
