参考文献 https://blog.csdn.net/Xurui_Luo/article/details/106357545 https://blog.csdn.net/Trasper1/article/details/81878892
贝叶斯公式


_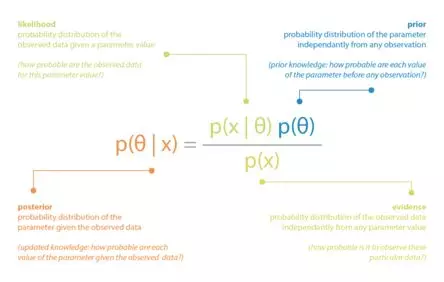
为了更有效了解贝叶斯方法,首先要对贝叶斯公式中的各项有个提前的了解。
 :后验概率分布 Posterior
:后验概率分布 Posterior :似然概率分布 Likelihood
:似然概率分布 Likelihood :先验概率分布 Prior
:先验概率分布 Prior
对贝叶斯公式的直观理解就是:
通过新一波采样得到数据 ,我们可以计算出新的
,我们可以计算出新的  概率分布,也就是 也称对 的更新、纠正。通过这个概率分布,我们就可以得到 的值,计算方法就是求 这个分布下, 的均值。
概率分布,也就是 也称对 的更新、纠正。通过这个概率分布,我们就可以得到 的值,计算方法就是求 这个分布下, 的均值。
贝叶斯派的基本思想 vs 频率学派基本思想
- 在贝叶斯理论中, 是根据你的观测在不停变的。在这个过程中,每一次的观测,得到的具体数据 则视作固定的。根据观测,会不断地更新 。
- 频率学派则相反。 是一直都固定的。无论你怎样进行采样, 都不会发生改变,因此想要求 就得利用极大似然估计。这个本文不作介绍。
解释
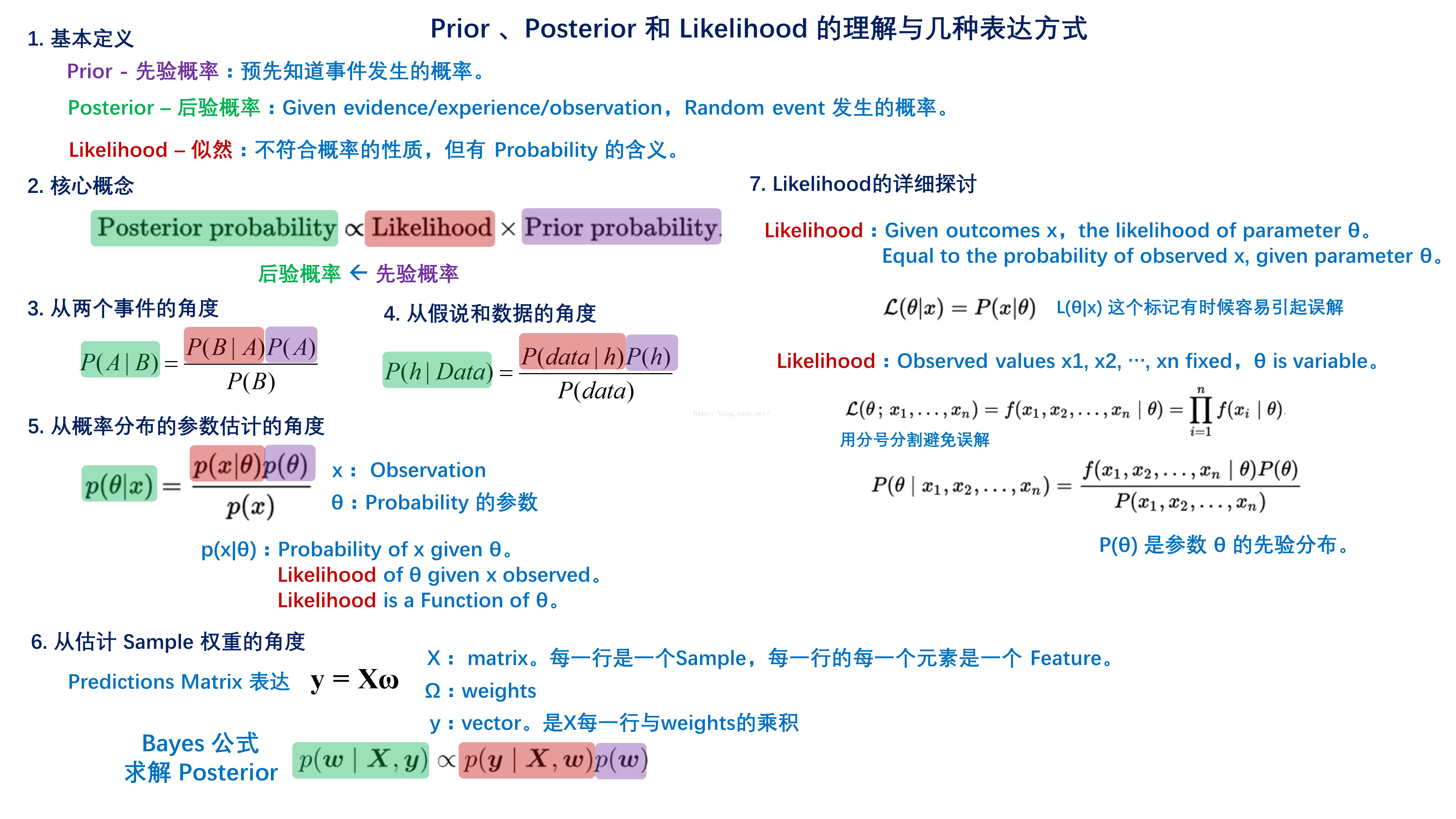
Prior 先验——
之前的知识,我们对它刻板印象,没有基于观测的数据思考而进行的猜测。比如这里 的分布是我们先前根据经验得来的,它的概率分布就是。
由于一般的机器学习中,是没有办法得到关于参数的先验信息的,所以一般无法直接利用先验来做一些事情
Likelihood 似然 ——
顾名思义,似然就是像这样,因此其表达式肯定看着像,但不是真的。像什么呢?就是你得到的这些观测数据,像是根据你的先验知识,估计而来而来的。其含义正是这个公式。它表示在给定 的情况下, 服从的概率分布。
那么既然只是像,哪里有问题呢?
结合之前所说, 是固定的,根本不会随着 的改变而发生任何变化。因此,这里仅仅只是似然,假装是 控制 的生成,假装 对 的分布起作用。
在许多机器学习中,用Loss值的负数来代表似然。
Posterior 后验——
在你有了观测的数据之后,得到的新参数的概率分布。正如贝叶斯的思想所言,控制事务发生概率的参数 是变化的,它会随着新的观测数据到来,不断改变。
有了它以后,可以根据概率分布求期望(均值),从而进行一些估计。
大多数机器学习中,需要对后验概率进行推测,这也是贝叶斯机器学习的目的。
**
贝叶斯分类器
贝叶斯分类器是传统机器学习模型的一种,是在概率框架下利用训练集D观测估计样本属性(feature)与分类结果之间的后验概率关系。后验概率,就是在观测过样本的属性(feature)之后对其分类情况的概率分布(比如0.3的概率是正类,0.7的概率是反类)。贝叶斯分类器直观看就是一个由在样本集D上学习到的后验概率和likelihood组成的计算公式**,在测试阶段,将输入测试样本的feature带入可以计算出各类的分类confidence(confidence即后验)**。

若有收获,就点个赞吧
0 人点赞
