在连续学习的正则化方法中,构建Importance Matrix的方法有很大的影响力。其原理是对参数有关老任务部分进行约束更新。根据方法出现前后顺序,主要存在以下几种方法。
EWC
Kirkpatrick J, Pascanu R, Rabinowitz N, et al. Overcoming catastrophic forgetting in neural networks[J]. Proceedings of the national academy of sciences, 2017, 114(13): 3521-3526.
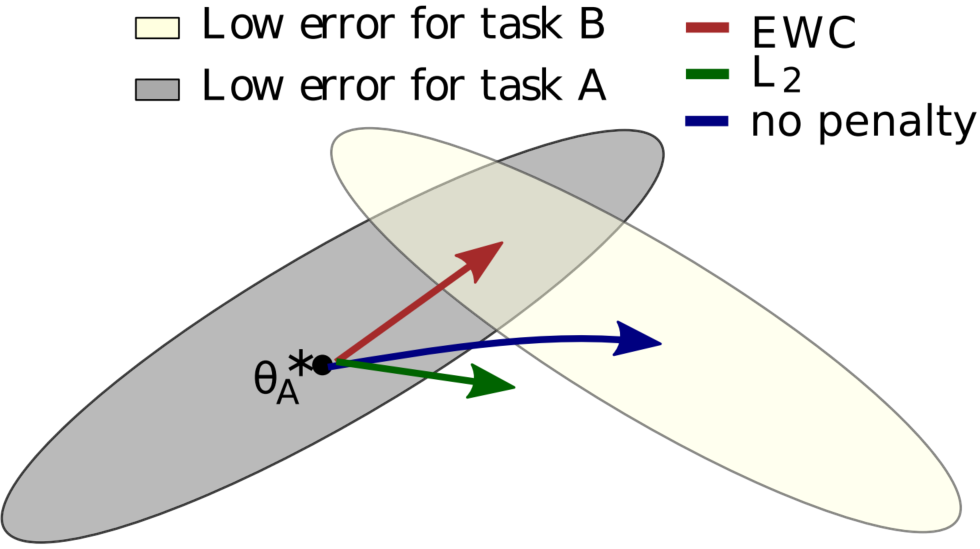
EWC 作为该类开创方法之一,从小鼠突触通过学习某类知识之后会一直保留的现象,提出Task-specific Synaptic Consolidation的解决方案。出发点是当前的神经网络过参数化严重,让模型中的个部分参数对应不同任务是可以满足的。
参数约束通过二次约束Quadratic Penalty实现,难点在于寻找哪些参数是对哪些任务重要。
Quadratic Penalty
监督学习模型的学习过程可以认为是求 的过程,根据贝叶斯公式可以得到
的过程,根据贝叶斯公式可以得到

其中, 可以由损失函数的相反数得到,即
可以由损失函数的相反数得到,即 。
。
假设  ,由两个独立的数据集构成,那么上式可以化为
,由两个独立的数据集构成,那么上式可以化为

在连续学习中,如果是先学习任务A再学习任务B,可以认为 可以认为是之前任务学习的后验概率,是已知的。
可以认为是之前任务学习的后验概率,是已知的。
为了衡量哪些参数对任务 A 重要,利用拉普拉斯近似,将该重要性的后验近似为一个高斯分布,均值为上一个任务学得的参数  ,对角精度由费雪矩阵
,对角精度由费雪矩阵  给定。
给定。
费雪矩阵的关键特性:
- 等价于loss的二阶导的局部最小值
- 容易计算,从一阶导求得
- 是半正定的
EWC的损失函数可以定义为

EWC 采用 Fisher 矩阵近似参数的二阶导(海森矩阵)。
解析
根据最大化后验概率的目的,上式  可以化为目标函数:
可以化为目标函数:

其中, 即参数对数据的条件概率,表现为损失的值
即参数对数据的条件概率,表现为损失的值 ,即最大化后验概率等价于,最小化损失函数;
,即最大化后验概率等价于,最小化损失函数; 则可以看作是任务A训练好的参数。
则可以看作是任务A训练好的参数。
连续学习在训练任务B的时候, 认为是不可见的,因此,无法在训练的时候直接获得后验
认为是不可见的,因此,无法在训练的时候直接获得后验 。常用的近似方法如变分推断、MCMC、拉普拉斯(Laplace)近似之类的,论文用了拉普拉斯近似。
。常用的近似方法如变分推断、MCMC、拉普拉斯(Laplace)近似之类的,论文用了拉普拉斯近似。
拉普拉斯近似
拉普拉斯近似采用一个高斯分布来近似 。假设
。假设  ,那么有
,那么有
上式中, 是参数变量,
是参数变量,  是不可见的,如何让
是不可见的,如何让  的更新受到该高斯分布的约束。显然,对于任务A,
的更新受到该高斯分布的约束。显然,对于任务A, 的期望是
的期望是  ,在
,在  处展开:
处展开:

因为  时
时  取最大值,可以认为其一阶导雅各比矩阵为0。又因为概率密度函数在一维空间上,因此有
取最大值,可以认为其一阶导雅各比矩阵为0。又因为概率密度函数在一维空间上,因此有

 代表了海森矩阵,在EWC中代表了重要性矩阵Importance Matrix, 根据约等式可以推得
代表了海森矩阵,在EWC中代表了重要性矩阵Importance Matrix, 根据约等式可以推得

那么上述优化问题可以化为

 能直接算出来,但是这里参数
能直接算出来,但是这里参数 是
是  维向量,所以
维向量,所以 是
是  的海森矩阵,计算的时间和空间复杂度都比较大。为了减小计算开销,论文把海森矩阵转成了 Fisher 信息矩阵。
的海森矩阵,计算的时间和空间复杂度都比较大。为了减小计算开销,论文把海森矩阵转成了 Fisher 信息矩阵。
Fisher 信息矩阵
Fisher 信息矩阵等于海森矩阵的期望取负(这里是证明过程):

费雪信息矩阵只需要计算一阶导 (Fisher 定义),计算量很低。假设各参数之间相互独立,可以只取费雪矩阵的对角线,即

采用蒙特卡洛采样,从数据集中采样来计算Fisher矩阵

在任务A上训练完成之后获得  ,在此基础上重新采样所有数据,得每个样本的梯度平方的期望,就可以得到Fisher 信息矩阵(对角)。
,在此基础上重新采样所有数据,得每个样本的梯度平方的期望,就可以得到Fisher 信息矩阵(对角)。
所以,最终的EWC的训练损失函数是

Fisher 信息矩阵也反映了我们对参数估计的不确定度。二阶导越大,说明我们对该参数的估计越确定,同时 Fisher 信息也越大,惩罚项就越大。于是越确定的参数在后面的任务里更新幅度就越小。
EWC针对每个任务都构建一个Fisher矩阵和对应惩罚项,随着任务数目增多,性能会比较大的降低。
MAS
SI
SSR

若有收获,就点个赞吧
0 人点赞
