串口通信原理——UART
1.通信接口背景知识
1.处理器与外部设备通信的两种方式
** 1.并行通信 ** ** 2.串行通信**<br /> 传输原理:数据各个位同时传输 传输原理:数据按位顺序传输<br /> 优点:速度快 优点:占用引脚资源少<br /> 缺点:占用引脚资源多 缺点:速度相对较慢
2.串行通信
** 按照数据传送方向分为**<br /> **单工**:数据传输只支持数据在一个方向上传输。<br /> **半双工**:允许数据在两个方向上传输,但是,在某一时刻,只允许数据在一个方向上传输,它实际上是一种切换方向的单工通信。<br /> **双工:**允许数据同时在两个方向上传输,因此,全双工通信是两个单工通信方式的结合,它要求发送设备和接收设备都有独立的接收和发送能力。<br /> **串行通信三种传送方式**<br /> 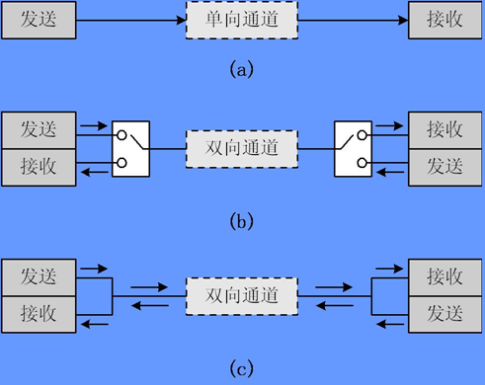
3.串行通信的通信方式
**1.同步通信**:带时钟同步信号传输。 ----SPI,IIC通信接口<br /> ** 2.异步通信**:不带时钟同步信号。 ----UART(通用异步收发器),单总线
4.常见的串行通信接口

2.STM32串口通信基础
1.STM32的串口通信接口
UART 通用异步收发器
USART 通用同步异步收发器 (也可以做为UART来用)
大容量STM32F10x系列芯片,包含3个USART和2个UART
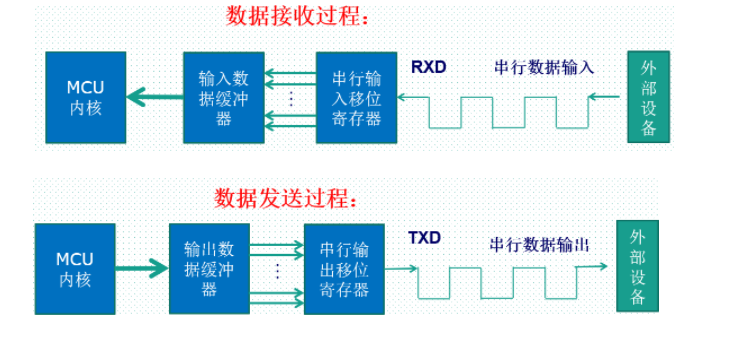
2.UART异步通信方式引脚连接方法
RXD:数据输入引脚 数据接受
TXD:数据发送引脚 数据发送
![R8]Y@9G0AB2@J`8MVE07WDA.png](/uploads/projects/pigxiansheng@kt7289/ac56311e1d0d34ef08f2d23f7af8bd21.png)
一些串口对应的引脚
5.STM32串口异步通信需要定义的参数
①起始位<br />②数据位(8位或者9位)<br />③奇偶校验位(第9位) 提高数据传输的准确率<br />④停止位(1,15,2位)500<br />⑤波特率设置<br /> <br />**1.起始位**<br /> 当未有数据发送时,数据线处于逻辑“1”状态;先发出一个逻辑“0”信号,表示开始传输字符
2.数据位
紧随起始位之后,数据位表示真正要发送或接收的信息,位数一般有8位或9位
3.奇偶校验位
数据位末尾可以选择是否添加奇偶校验位,用于检测数据传输是否正确
4.停止位
代表信息传输结束的标志位,可以是1位,1.5位或2位。停止位的位数越多,数据传输的速率也越慢
5.波特率设置
波特率表示每秒钟传输码元的个数,是衡量数据传输速率的指标,单位Baud
![Q8K6~~C@@IEMW%ZFI9{99I.png
6.STM32RF1串口框图
![GW}{]OF8O@I{8{6V74IL`8F.png](https://cdn.nlark.com/yuque/0/2021/png/22507599/1630057113309-a2cf01f1-d0dc-4bb2-8608-8fc40dbccfde.png#clientId=u658b14de-eada-4&from=paste&height=436&id=uca98afb4&margin=%5Bobject%20Object%5D&name=GW%7D%7B%5DOF8O%40I%7B8%7B6V74IL%608F.png&originHeight=784&originWidth=720&originalType=binary&ratio=1&size=219210&status=done&style=none&taskId=u251a84d6-17ba-4917-aaba-951c4eecf53&width=400)<br /> 学习网址:[https://www.cnblogs.com/wenshinlee/p/8970528.html](https://www.cnblogs.com/wenshinlee/p/8970528.html)<br /> 很详细地介绍了各部分的功能,可以学习参考。
3.STM32串口寄存器库函数配置方法
1.STM32串口常用寄存器和库函数
可以参考STM32中文参考手册25.6USART寄存器描述<br /> ** 状态寄存器(USART_SR)** 了解<br /> 例如: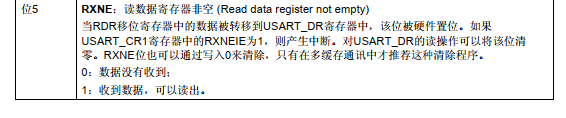<br /> ** 数据寄存器(USART_DR)** 了解<br /> 常用: ![OP7$8L]3]@2PXQP6D5113[V.png](https://cdn.nlark.com/yuque/0/2021/png/22507599/1630057880931-fc6e3600-d4a0-4568-a4c7-26a780e9c0b8.png#clientId=u658b14de-eada-4&from=paste&height=89&id=u2fcaf678&margin=%5Bobject%20Object%5D&name=OP7%248L%5D3%5D%402PXQP6D5113%5BV.png&originHeight=125&originWidth=560&originalType=binary&ratio=1&size=41361&status=done&style=none&taskId=u27f4454a-76c3-4a0b-8471-fc0abbe8baf&width=400)<br /> ** 波特比率寄存器(USART_BRR)** 重要<br /> <br /> **控制寄存器 1(USART_CR1) **常用<br /> 具有独立使能位 例如 中断使能、发送使能、接收使能
2.波特率计算方法
![78E}$[VBKH$]]5$A[U{`AY0.png](https://cdn.nlark.com/yuque/0/2021/png/22507599/1630058199941-274fbca4-d361-4486-acd6-3ae871b98fdb.png#clientId=u658b14de-eada-4&from=paste&height=396&id=uc517d03f&margin=%5Bobject%20Object%5D&name=78E%7D%24%5BVBKH%24%5D%5D5%24A%5BU%7B%60AY0.png&originHeight=777&originWidth=1177&originalType=binary&ratio=1&size=766879&status=done&style=none&taskId=u96502c33-5489-4207-b53b-e77ccb189b0&width=600)
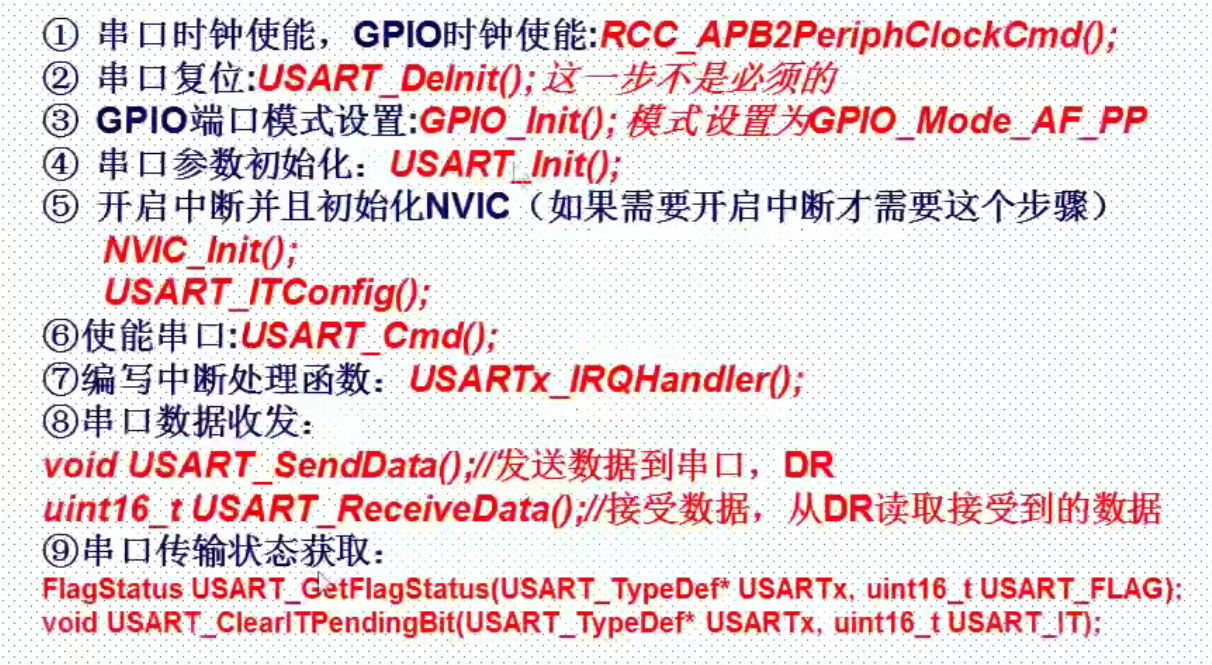
3.串口操作相关库函数
void USART nit();//串口初始化:波特率,数据字长,奇偶校验,硬件流控以及收发使能void USART Cmd();//使能串口<br /> void USART ITConfig/);//使能相关中断
void USART SendData);//发送数据到串口,DR<br /> uint16 t USART ReceiveData();//接受数据,从DR读取接受到的数据FlagStatus USART GetFlagStatus);/获取状态标志位
void USART_ ClearFlag/);//清除状态标志位
ITStatus USART GetlTStatus);//获取中断状态标志位
void USART ClearlTPendingBit(;//清 除中断状态标志位
4.串口配置一般步骤
1.硬件设计
1. PA9,PA10(串口1)连接到了USB串口电路<br /> 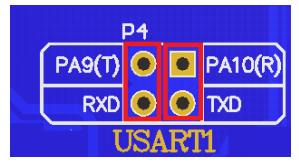
2.软件设计
<br /> 配置全双工的串口 1,那么 TX(PA9) 管脚需要配置为推挽复用输出, RX(PA10)管脚配置为浮空输入或者带上拉输入。 参考如下<br /> ![UB(L9A@@]Y){GZU}JK1I$H8.png](https://cdn.nlark.com/yuque/0/2021/png/22507599/1630068041571-5077329a-54ae-4051-9731-06868fb665b8.png#clientId=u51d79aca-872b-4&from=paste&height=117&id=ua1fb3b74&margin=%5Bobject%20Object%5D&name=UB%28L9A%40%40%5DY%29%7BGZU%7DJK1I%24H8.png&originHeight=186&originWidth=792&originalType=binary&ratio=1&size=46335&status=done&style=none&taskId=u0edf3117-56ea-45e6-9df3-d3283b0e3cf&width=500)<br /> <br />
4.串口通信实验讲解
1.头文件usart.h分析
#ifndef __USART_H#define __USART_H#include "stdio.h"#include "sys.h"#define USART_REC_LEN 200 //定义最大接收字节数 200#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符extern u16 USART_RX_STA; //接收状态标记void uart_init(u32 bound);#endif
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
u16 USART_RX_STA=0; //接收状态标记 bit15, 接收完成标志
bit14, 接收到0x0d
bit13~0, 接收到的有效字节数目

程序要求,发送的字符是以回车换行结束(0x0D,0x0A)
2.usart.c分析
**uart_init(u32 bound) //主函数调用设置波特率**
void uart_init(u32 bound){//GPIO端口设置GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟//USART1_TX GPIOA.9GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9//USART1_RX GPIOA.10初始化GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10//Usart1 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器//USART 初始化设置USART_InitStructure.USART_BaudRate = bound;//串口波特率USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART1, &USART_InitStructure); //初始化串口1USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断USART_Cmd(USART1, ENABLE); //使能串口1}
<br /> ** 编写中断处理函数**
void USART1_IRQHandler(void) //串口1中断服务程序{u8 Res;#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.OSIntEnter();#endifif(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾){Res =USART_ReceiveData(USART1); //读取接收到的数据if((USART_RX_STA&0x8000)==0)//接收未完成{if(USART_RX_STA&0x4000)//接收到了0x0d{if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始else USART_RX_STA|=0x8000; //接收完成了}else //还没收到0X0D{if(Res==0x0d)USART_RX_STA|=0x4000;else{USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;USART_RX_STA++;if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收}}}}#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.OSIntExit();#endif}#endif
USART_GetITStatus():用于获取接收状态,即是否开启接收
USART_ReceiveData():获得当前接收到的数据,数据长度8位
USART_RX_STA:接收的状态标志,数据长度16位,第14位、15位对接收结束的判断,第0~13位是接收数据的长度。
USART_RX_BUF[ ]:数据存储栈,将接受到的数据依次存储
中断服务过程
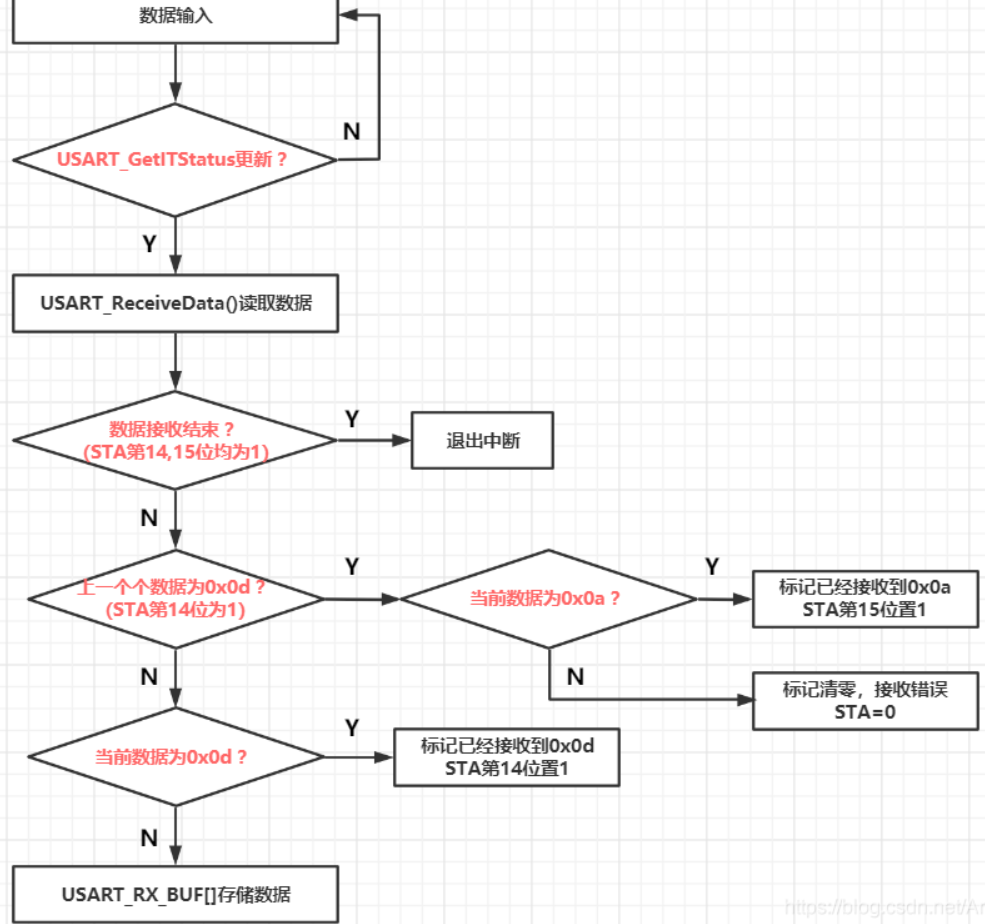
当 USART_GetITStatus读取到起始位时触发更新请求,代表数据开始接收。用USART_ReceiveData()读取当前接收的数据,如果不是0x0d,则将数据保存到BUF中,如果连续接收到了0x0d(回车),0x0a(换行)表示数据接收结束,STA的第15位置1,在主程序main()中执行相关操作并等待开启下一次的数据接收(当STA=0时表示数据可以被接收存储)。

若有收获,就点个赞吧
0 人点赞

{kind=link}
{kind=link}