Dynamic Programming
关键点
- 动态规划 和 递归或者分治没有本质上的区别 (关键看有无最优的子结构)
- 共性 :找到重复子问题
-
DP的步骤
找重复性(分治)
- 定义状态数组
-
DP例题解析
Fibonacci数列
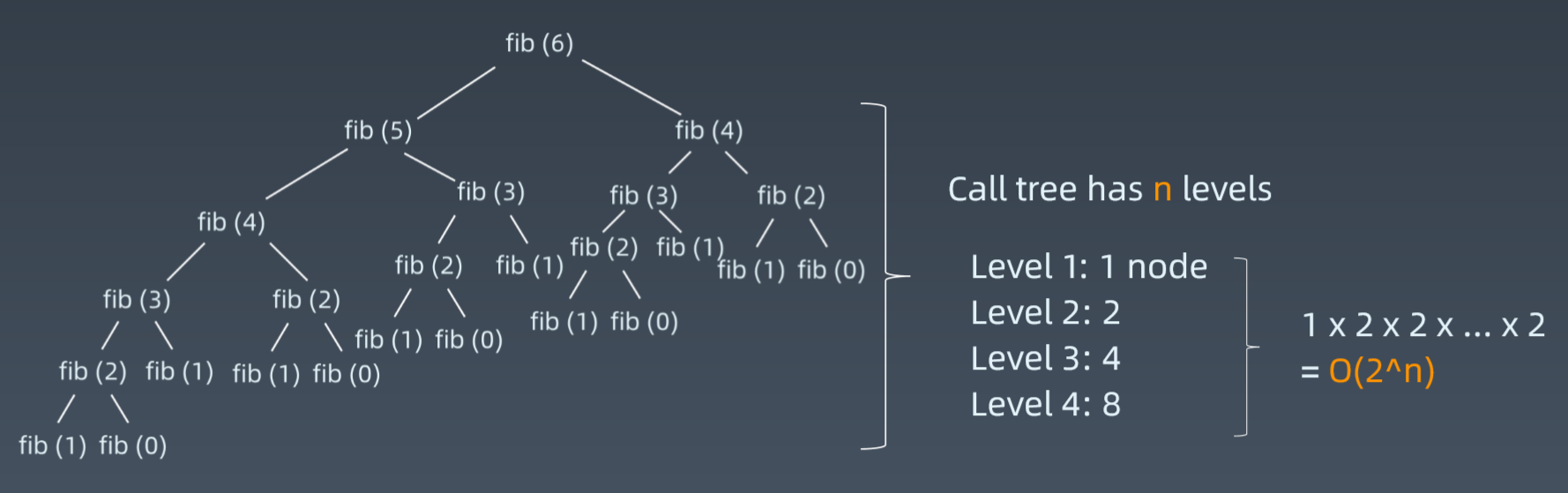
斐波那契数列如果用傻递归的话,因为有很多的重复计算,时间复杂度就是指数级的,如下
int fib(int n) {if (n <= 1) {return n;}return fib(n - 1) + fib(n - 2);}
简化代码:简化速度以及简化表达。
以下是简化表达,使用三元表达式int fib(int n) {return n <= 1 ? n : fib(n - 1) + fib(n - 2);}
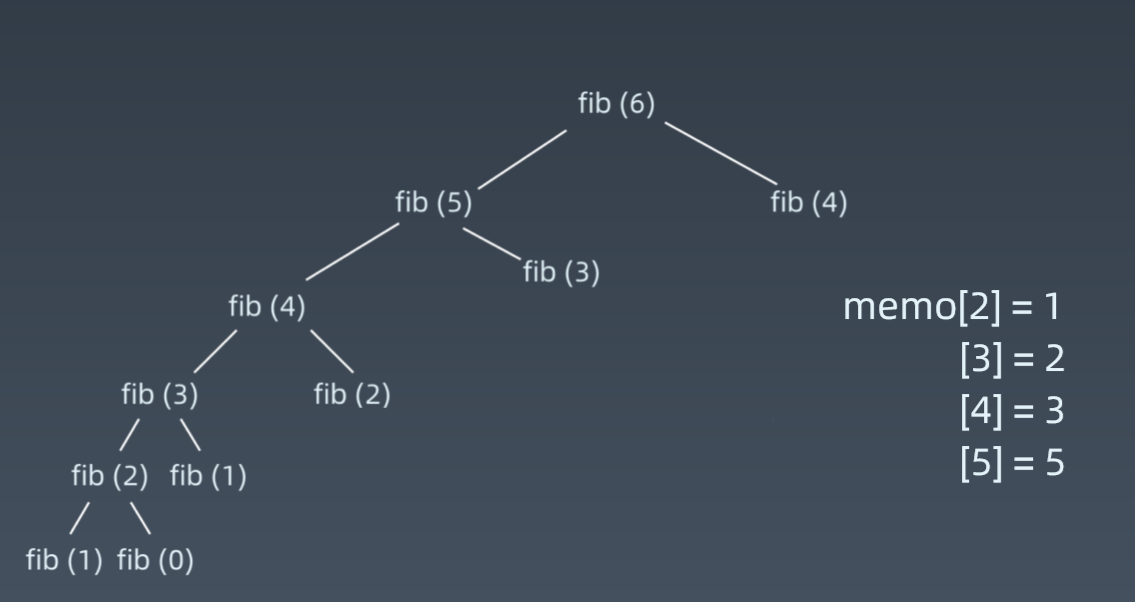
递归的时候加一个缓存(记忆化搜索),可以加一个数组来存放已经计算出来的值,下次使用的时候就不用重复计算了,直接在缓存中拿,这样时间复杂度就降到了O(n)
int fib(int n , int[] memo) {//递归终止条件if (n <= 1) {return n;}//因为Fibonacci数列都是正数,等于0说明这个值没有被计算过if (memo[n] == 0){memo[n] = fib(n - 1) + fib(n - 2);}return memo[n];}
DP - 直接写一个循环,自底向上递推,不断累加。(递归的思维是自顶向下)
F[n] = F[n - 1] + F[n - 2]
int fib(int n , int[] a) {a[0] = 0;a[1] = 1;for (int i = 2;i <= n;i++) {a[i] = a[i - 1] + a[i - 2];}}
路径计数
如下图,求从左上角到右下角有多少种不同的走法。绿人只能往下和右两个方向走,橙色部分是障碍物。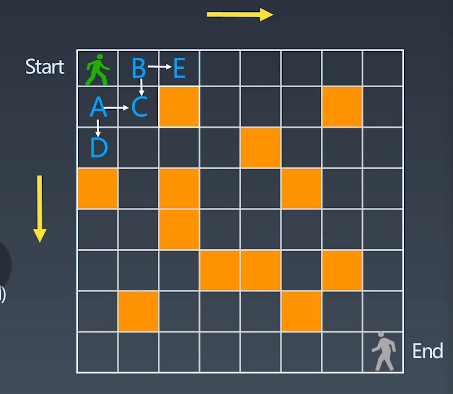
- 递归 - 注意要用计算机的思维,分治找重复的子问题。
解析:
如果想要从 start 走到 end ,绿人一步只能先走到 B 或者先走到 A ,那么就可以分解为子问题了。
子问题1:求从 B 走到 end 有多少种不同的走法;
子问题2:求从 A 走到 end 有多少种不同的走法;
那么子问题1 的解 + 子问题2 的解 就是从左上角到右下角不同的走法的解。
这就是分治的思想,如图: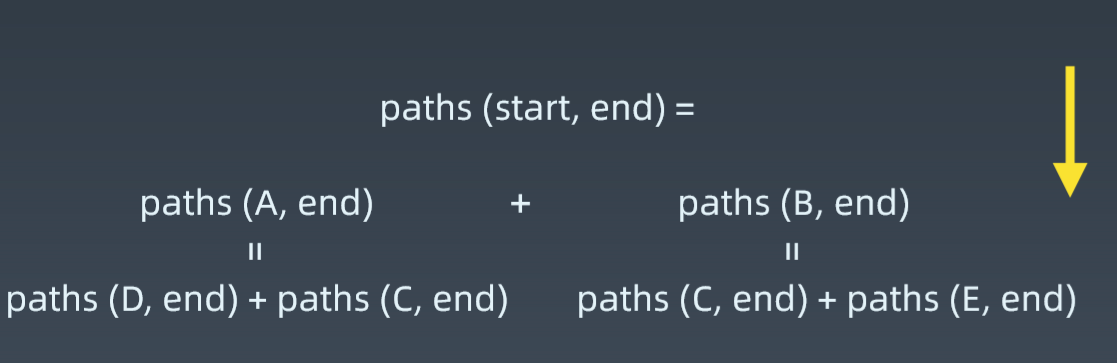
int countPaths(boolean[][] grid, int row, int col){//如果遇到障碍物返回0if (!validSquare(grid, row, col)) {return 0}if (isAtEnd(grid, row, col)) {return 1;}return countPaths(grid, row + 1, col) + countPaths(grid, row, col + 1);}
- DP - 递推
递推就是自底向上的思想,如下图,到达终点只能从上面的格子和左边的格子走一步。每一个格子的走法都是其上面的格子的走法加上左格子的走法,遇到障碍物就是0.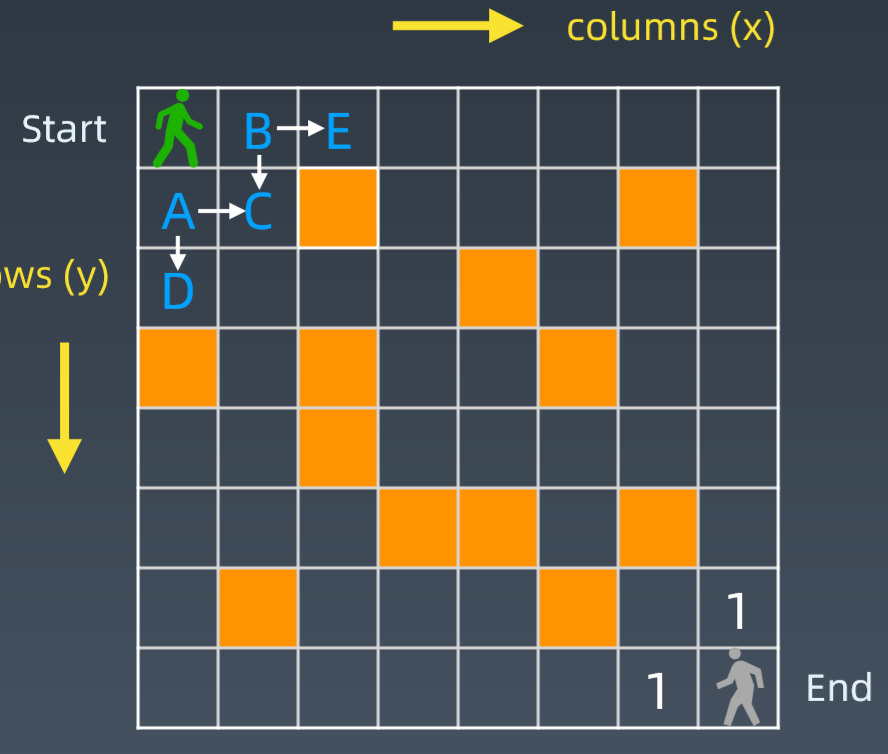
依次向上递推,我们可以得到一个递推公式,即 opt[i , j] = opt[i, j + 1] + opt[i+ 1, j] , [i, j] 表示坐标位置。
完整逻辑:
if opt[i, j] = "空地"opt[i, j] = opt[i, j + 1] + opt[i + 1, j];elseopt[i, j] = 0;
发现最终的方法总是是 10+17 = 27 。
leetcode题解 不同路径Ⅱ
/*DP1. 先分析出DP方程2. 确定边界,除障碍物外边界都为13. 使用DP方程不断累加,这里也要注意除去障碍物*/class Solution {public int uniquePathsWithObstacles(int[][] obstacleGrid) {//如果入口就有障碍,方法就为0if (obstacleGrid[0][0] == 1) {return 0;}int m = obstacleGrid.length;int n = obstacleGrid[0].length;int[][] dp = new int[m][n];for (int i = 0 ; i < m && obstacleGrid[i][0] == 0; i++) {dp[i][0] = 1;}for (int i = 0 ; i < n && obstacleGrid[0][i] == 0; i++) {dp[0][i] = 1;}for (int i = 1; i < m; i++) {for (int j = 1;j < n;j++) {if(obstacleGrid[i][j] == 0) {dp[i][j] = dp[i - 1][j] + dp[i][j - 1];}}}return dp[m - 1][n - 1];}}
总结
- 最优子结构
opt[n] = best_of(opt[n - 1], opt[n - 2], ...) - 存储中间状态:
opt[i] 递推公式(状态转移方程或DP方程)
Fib :
opt[i] = opt[n - 1] + opt[n - 2]
二维路径:opt[i,j] = opt[i + 1, j] + opt[i, j + 1](且判断a[i,j]是否空地)

若有收获,就点个赞吧
0 人点赞
