过去两讲,我为你讲解了流水线设计 CPU 所需要的基本概念。接下来,我们一起来看看,要想通过流水线设计来提升 CPU 的吞吐率,我们需要冒哪些风险。
任何一本讲解 CPU 的流水线设计的教科书,都会提到流水线设计需要解决的三大冒险,分别是结构冒险(Structural Hazard)、数据冒险(Data Hazard)以及控制冒险(Control Hazard)。
这三大冒险的名字很有意思,它们都叫作hazard(冒险)。喜欢玩游戏的话,你应该知道一个著名的游戏,生化危机,英文名就叫 Biohazard。的确,hazard 还有一个意思就是“危机”。那为什么在流水线设计里,hazard 没有翻译成“危机”,而是要叫“冒险”呢?
在 CPU 的流水线设计里,固然我们会遇到各种“危险”情况,使得流水线里的下一条指令不能正常运行。但是,我们其实还是通过“抢跑”的方式,“冒险”拿到了一个提升指令吞吐率的机会。流水线架构的 CPU,是我们主动进行的冒险选择。我们期望能够通过冒险带来更高的回报,所以,这不是无奈之下的应对之举,自然也算不上什么危机了。
事实上,对于各种冒险可能造成的问题,我们其实都准备好了应对的方案。这一讲里,我们先从结构冒险和数据冒险说起,一起来看看这些冒险及其对应的应对方案。
结构冒险:为什么工程师都喜欢用机械键盘?
我们先来看一看结构冒险。结构冒险,本质上是一个硬件层面的资源竞争问题,也就是一个硬件电路层面的问题。
CPU 在同一个时钟周期,同时在运行两条计算机指令的不同阶段。但是这两个不同的阶段,可能会用到同样的硬件电路。
最典型的例子就是内存的数据访问。请你看看下面这张示意图,其实就是第 20 讲里对应的 5 级流水线的示意图。
可以看到,在第 1 条指令执行到访存(MEM)阶段的时候,流水线里的第 4 条指令,在执行取指令(Fetch)的操作。访存和取指令,都要进行内存数据的读取。我们的内存,只有一个地址译码器的作为地址输入,那就只能在一个时钟周期里面读取一条数据,没办法同时执行第 1 条指令的读取内存数据和第 4 条指令的读取指令代码。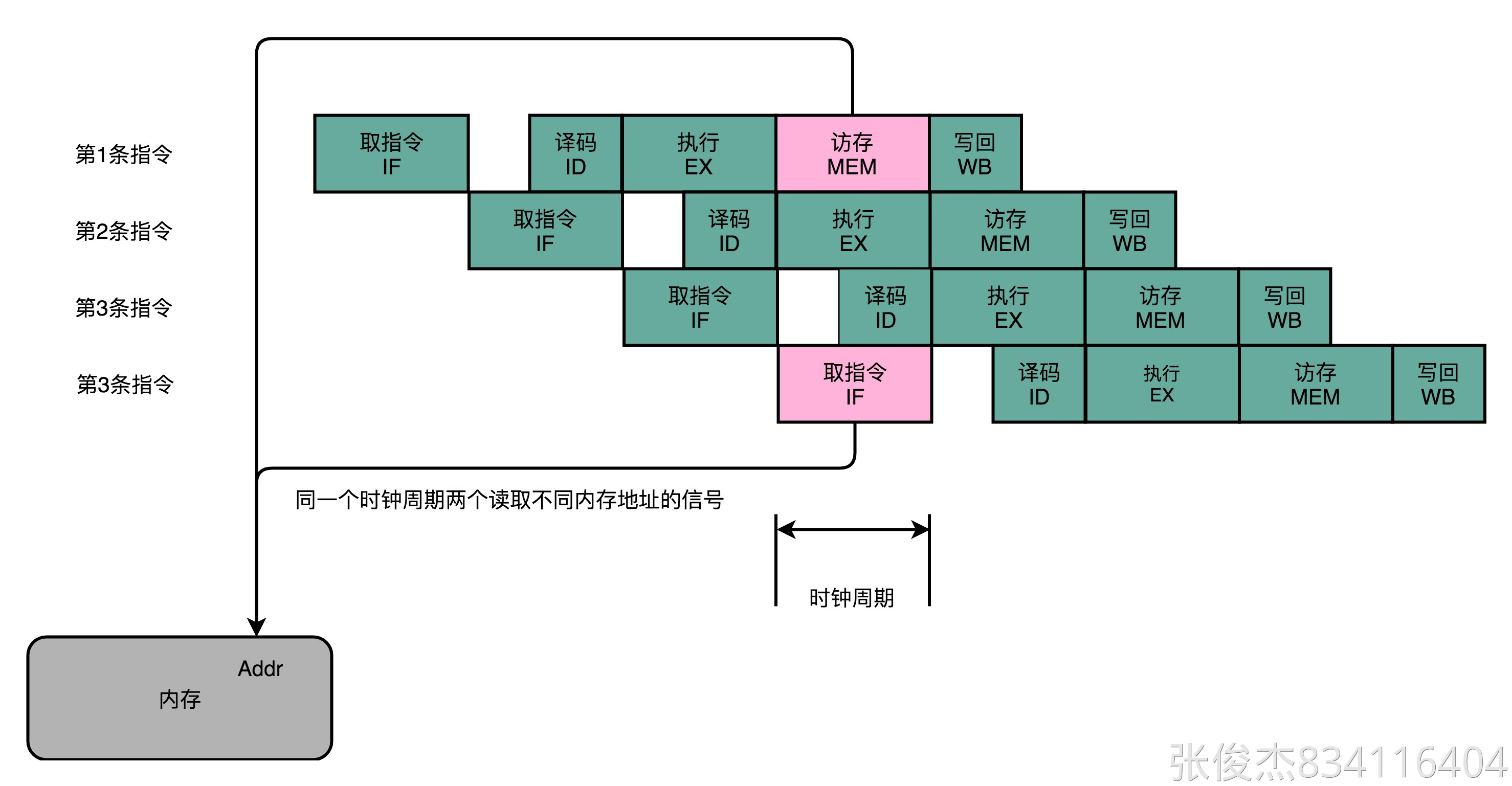
同一个时钟周期,两个不同指令访问同一个资源
类似的资源冲突,其实你在日常使用计算机的时候也会遇到。最常见的就是薄膜键盘的“锁键”问题。常用的最廉价的薄膜键盘,并不是每一个按键的背后都有一根独立的线路,而是多个键共用一个线路。如果我们在同一时间,按下两个共用一个线路的按键,这两个按键的信号就没办法都传输出去。
这也是为什么,重度键盘用户,都要买贵一点儿的机械键盘或者电容键盘。因为这些键盘的每个按键都有独立的传输线路,可以做到“全键无冲”,这样,无论你是要大量写文章、写程序,还是打游戏,都不会遇到按下了键却没生效的情况。
“全键无冲”这样的资源冲突解决方案,其实本质就是增加资源。同样的方案,我们一样可以用在 CPU 的结构冒险里面。对于访问内存数据和取指令的冲突,一个直观的解决方案就是把我们的内存分成两部分,让它们各有各的地址译码器。这两部分分别是存放指令的程序内存和存放数据的数据内存。
这样把内存拆成两部分的解决方案,在计算机体系结构里叫作哈佛架构(Harvard Architecture),来自哈佛大学设计Mark I 型计算机时候的设计。对应的,我们之前说的冯·诺依曼体系结构,又叫作普林斯顿架构(Princeton Architecture)。从这些名字里,我们可以看到,早年的计算机体系结构的设计,其实产生于美国各个高校之间的竞争中。
不过,我们今天使用的 CPU,仍然是冯·诺依曼体系结构的,并没有把内存拆成程序内存和数据内存这两部分。因为如果那样拆的话,对程序指令和数据需要的内存空间,我们就没有办法根据实际的应用去动态分配了。虽然解决了资源冲突的问题,但是也失去了灵活性。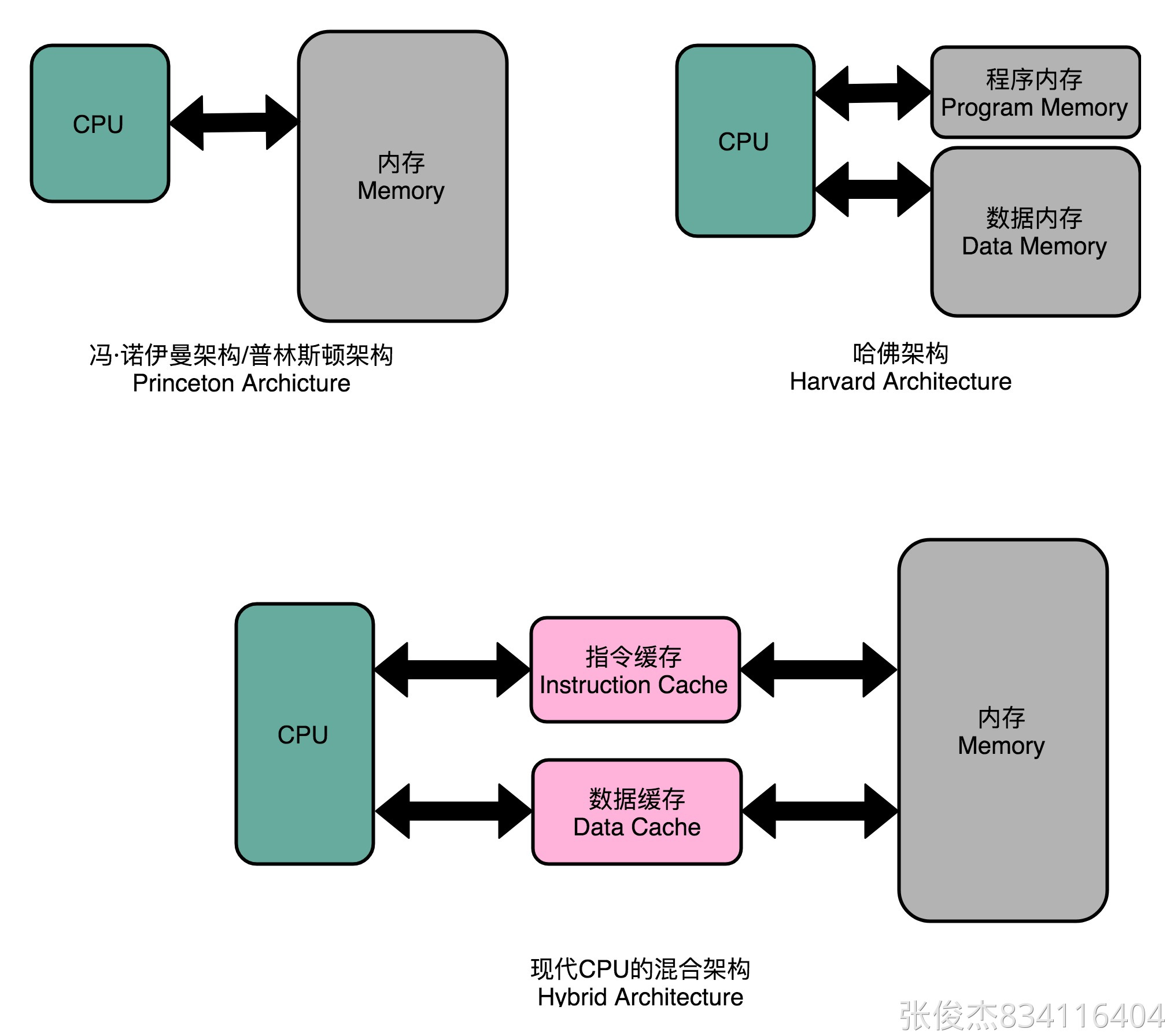
现代 CPU 架构,借鉴了哈佛架构,在高速缓存层面拆分成指令缓存和数据缓存
不过,借鉴了哈佛结构的思路,现代的 CPU 虽然没有在内存层面进行对应的拆分,却在 CPU 内部的高速缓存部分进行了区分,把高速缓存分成了指令缓存(Instruction Cache)和数据缓存(Data Cache)两部分。
内存的访问速度远比 CPU 的速度要慢,所以现代的 CPU 并不会直接读取主内存。它会从主内存把指令和数据加载到高速缓存中,这样后续的访问都是访问高速缓存。而指令缓存和数据缓存的拆分,使得我们的 CPU 在进行数据访问和取指令的时候,不会再发生资源冲突的问题了。
数据冒险:三种不同的依赖关系
结构冒险是一个硬件层面的问题,我们可以靠增加硬件资源的方式来解决。然而还有很多冒险问题,是程序逻辑层面的事儿。其中,最常见的就是数据冒险。
数据冒险,其实就是同时在执行的多个指令之间,有数据依赖的情况。这些数据依赖,我们可以分成三大类,分别是先写后读(Read After Write,RAW)、先读后写(Write After Read,WAR)和写后再写(Write After Write,WAW)。下面,我们分别看一下这几种情况。
先写后读(Read After Write)
我们先来一起看看先写后读这种情况。这里有一段简单的 C 语言代码编译出来的汇编指令。这段代码简单地定义两个变量 a 和 b,然后计算 a = a + 2。再根据计算出来的结果,计算 b = a + 3。
int main() {int a = 1;int b = 2;a = a + 2;b = a + 3;}
int main() {0: 55 push rbp1: 48 89 e5 mov rbp,rspint a = 1;4: c7 45 fc 01 00 00 00 mov DWORD PTR [rbp-0x4],0x1int b = 2;b: c7 45 f8 02 00 00 00 mov DWORD PTR [rbp-0x8],0x2a = a + 2;12: 83 45 fc 02 add DWORD PTR [rbp-0x4],0x2b = a + 3;16: 8b 45 fc mov eax,DWORD PTR [rbp-0x4]19: 83 c0 03 add eax,0x31c: 89 45 f8 mov DWORD PTR [rbp-0x8],eax}1f: 5d pop rbp20: c3 ret
你可以看到,在内存地址为 12 的机器码,我们把 0x2 添加到 rbp-0x4 对应的内存地址里面。然后,在紧接着的内存地址为 16 的机器码,我们又要从 rbp-0x4 这个内存地址里面,把数据写入到 eax 这个寄存器里面。
所以,我们需要保证,在内存地址为 16 的指令读取 rbp-0x4 里面的值之前,内存地址 12 的指令写入到 rbp-0x4 的操作必须完成。这就是先写后读所面临的数据依赖。如果这个顺序保证不了,我们的程序就会出错。
这个先写后读的依赖关系,我们一般被称之为数据依赖,也就是 Data Dependency。
先读后写(Write After Read)
我们还会面临的另外一种情况,先读后写。我们小小地修改一下代码,先计算 a = b + a,然后再计算 b = a + b。
int main() {int a = 1;int b = 2;a = b + a;b = a + b;}
int main() {0: 55 push rbp1: 48 89 e5 mov rbp,rspint a = 1;4: c7 45 fc 01 00 00 00 mov DWORD PTR [rbp-0x4],0x1int b = 2;b: c7 45 f8 02 00 00 00 mov DWORD PTR [rbp-0x8],0x2a = b + a;12: 8b 45 f8 mov eax,DWORD PTR [rbp-0x8]15: 01 45 fc add DWORD PTR [rbp-0x4],eaxb = a + b;18: 8b 45 fc mov eax,DWORD PTR [rbp-0x4]1b: 01 45 f8 add DWORD PTR [rbp-0x8],eax}1e: 5d pop rbp1f: c3 ret
我们同样看看对应生成的汇编代码。在内存地址为 15 的汇编指令里,我们要把 eax 寄存器里面的值读出来,再加到 rbp-0x4 的内存地址里。接着在内存地址为 18 的汇编指令里,我们要再写入更新 eax 寄存器里面。
如果我们在内存地址 18 的 eax 的写入先完成了,在内存地址为 15 的代码里面取出 eax 才发生,我们的程序计算就会出错。这里,我们同样要保障对于 eax 的先读后写的操作顺序。
这个先读后写的依赖,一般被叫作反依赖,也就是 Anti-Dependency。
写后再写(Write After Write)
我们再次小小地改写上面的代码。这次,我们先设置变量 a = 1,然后再设置变量 a = 2。
int main() {int a = 1;a = 2;}
int main() {0: 55 push rbp1: 48 89 e5 mov rbp,rspint a = 1;4: c7 45 fc 01 00 00 00 mov DWORD PTR [rbp-0x4],0x1a = 2;b: c7 45 fc 02 00 00 00 mov DWORD PTR [rbp-0x4],0x2}
在这个情况下,你会看到,内存地址 4 所在的指令和内存地址 b 所在的指令,都是将对应的数据写入到 rbp-0x4 的内存地址里面。如果内存地址 b 的指令在内存地址 4 的指令之后写入。那么这些指令完成之后,rbp-0x4 里的数据就是错误的。这就会导致后续需要使用这个内存地址里的数据指令,没有办法拿到正确的值。所以,我们也需要保障内存地址 4 的指令的写入,在内存地址 b 的指令的写入之前完成。
这个写后再写的依赖,一般被叫作输出依赖,也就是 Output Dependency。
再等等:通过流水线停顿解决数据冒险
除了读之后再进行读,你会发现,对于同一个寄存器或者内存地址的操作,都有明确强制的顺序要求。而这个顺序操作的要求,也为我们使用流水线带来了很大的挑战。因为流水线架构的核心,就是在前一个指令还没有结束的时候,后面的指令就要开始执行。
所以,我们需要有解决这些数据冒险的办法。其中最简单的一个办法,不过也是最笨的一个办法,就是流水线停顿(Pipeline Stall),或者叫流水线冒泡(Pipeline Bubbling)。
流水线停顿的办法很容易理解。如果我们发现了后面执行的指令,会对前面执行的指令有数据层面的依赖关系,那最简单的办法就是“再等等”。我们在进行指令译码的时候,会拿到对应指令所需要访问的寄存器和内存地址。所以,在这个时候,我们能够判断出来,这个指令是否会触发数据冒险。如果会触发数据冒险,我们就可以决定,让整个流水线停顿一个或者多个周期。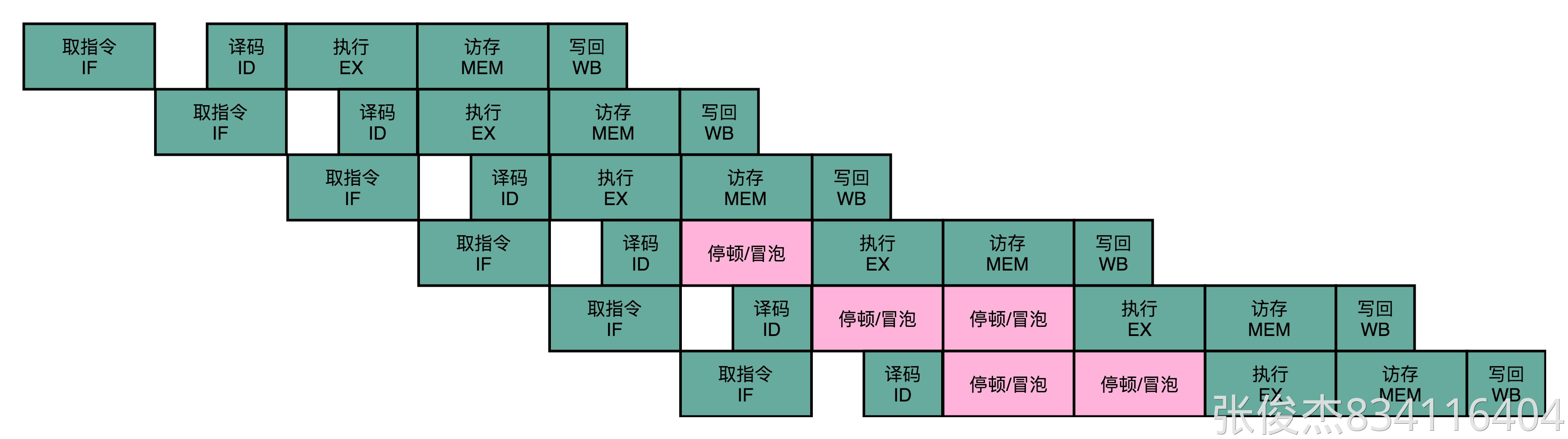
我在前面说过,时钟信号会不停地在 0 和 1 之前自动切换。其实,我们并没有办法真的停顿下来。流水线的每一个操作步骤必须要干点儿事情。所以,在实践过程中,我们并不是让流水线停下来,而是在执行后面的操作步骤前面,插入一个 NOP 操作,也就是执行一个其实什么都不干的操作。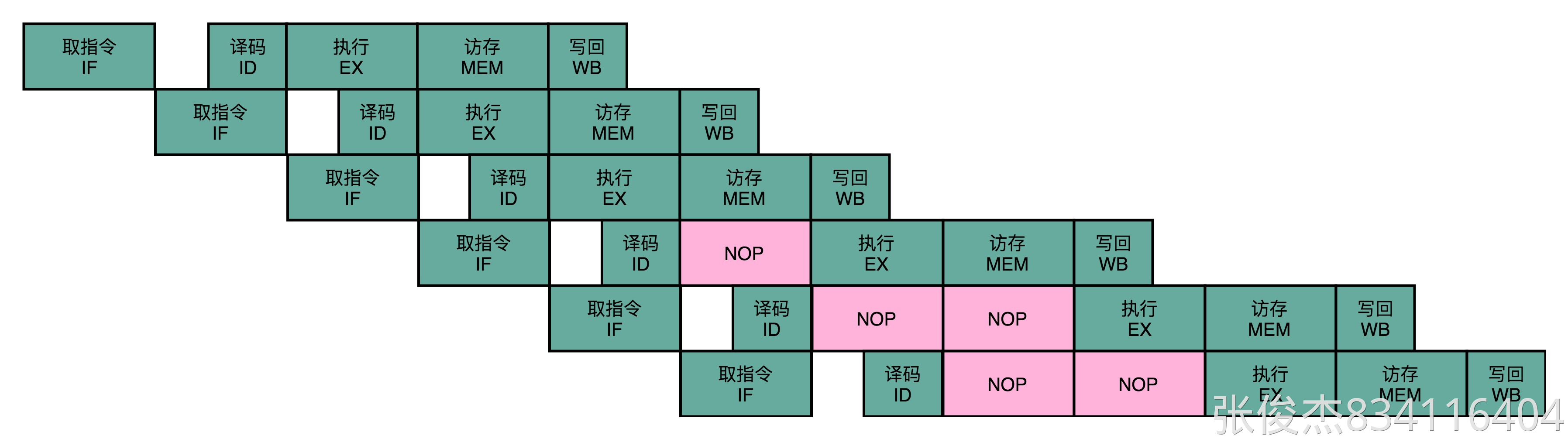
这个插入的指令,就好像一个水管(Pipeline)里面,进了一个空的气泡。在水流经过的时候,没有传送水到下一个步骤,而是给了一个什么都没有的空气泡。这也是为什么,我们的流水线停顿,又被叫作流水线冒泡(Pipeline Bubble)的原因。
总结延伸
讲到这里,相信你已经弄明白了什么是结构冒险,什么是数据冒险,以及数据冒险所要保障的三种依赖,也就是数据依赖、反依赖以及输出依赖。
一方面,我们可以通过增加资源来解决结构冒险问题。我们现代的 CPU 的体系结构,其实也是在冯·诺依曼体系结构下,借鉴哈佛结构的一个混合结构的解决方案。我们的内存虽然没有按照功能拆分,但是在高速缓存层面进行了拆分,也就是拆分成指令缓存和数据缓存这样的方式,从硬件层面,使得同一个时钟下对于相同资源的竞争不再发生。
另一方面,我们也可以通过“等待”,也就是插入无效的 NOP 操作的方式,来解决冒险问题。这就是所谓的流水线停顿。不过,流水线停顿这样的解决方案,是以牺牲 CPU 性能为代价的。因为,实际上在最差的情况下,我们的流水线架构的 CPU,又会退化成单指令周期的 CPU 了。
所以,下一讲,我们进一步看看,其他更高级的解决数据冒险的方案,以及控制冒险的解决方案,也就是操作数前推、乱序执行和还有分支预测技术。
推荐阅读
想要进一步理解流水线冒险里数据冒险的相关知识,你可以仔细看一看《计算机组成与设计:硬件 / 软件接口》的第 4.5~4.7 章。
想要了解流水线冒险里面结构冒险的相关知识,你可以去看一看 Coursera 上普林斯顿大学的 Computer Architecture 的Structure Hazard部分。
课后思考
在采用流水线停顿的解决方案的时候,我们不仅要在当前指令里面,插入 NOP 操作,所有后续指令也要插入对应的 NOP 操作,这是为什么呢?
欢迎留言和我分享你的疑惑和见解。你也可以把今天的内容,分享给你的朋友,和他一起学习和进步。

若有收获,就点个赞吧
0 人点赞
