舵机简介

舵机最早用于船舶上实现转向功能,由于可以通过程序连续控制其转角,因而被广泛应用于智能小车转向以及机器人各类关节中.
工作电压:3V-7.2V(取决于具体型号)
工作电流:100mA(取决于具体型号)
舵机由直流电机、减速齿轮组、传感器和控制电路组成的一套自动控制系统.通过发送信号,指定输出轴旋转角度.舵机一般而言都有最大旋转角度(比如180度)
与普通直流电机的区别:
- 直流电机是一圈圈转动的
- 舵机智能在一定角度内转动,不能一圈圈转动
- 普通的直流电机无法反馈转动的角度信息,而舵机可以
用途也不相同:
- 普通直流电机一般是整圈转动做动力用
- 舵机是控制某物体转动一定角度用(比如机器人的关节)
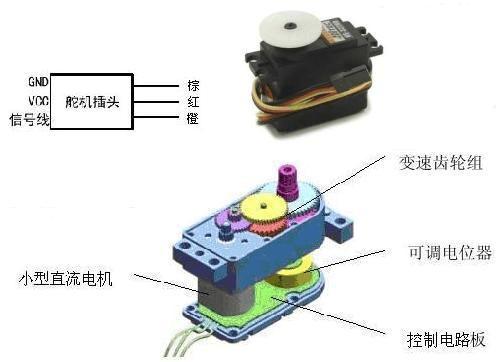
舵机信号线
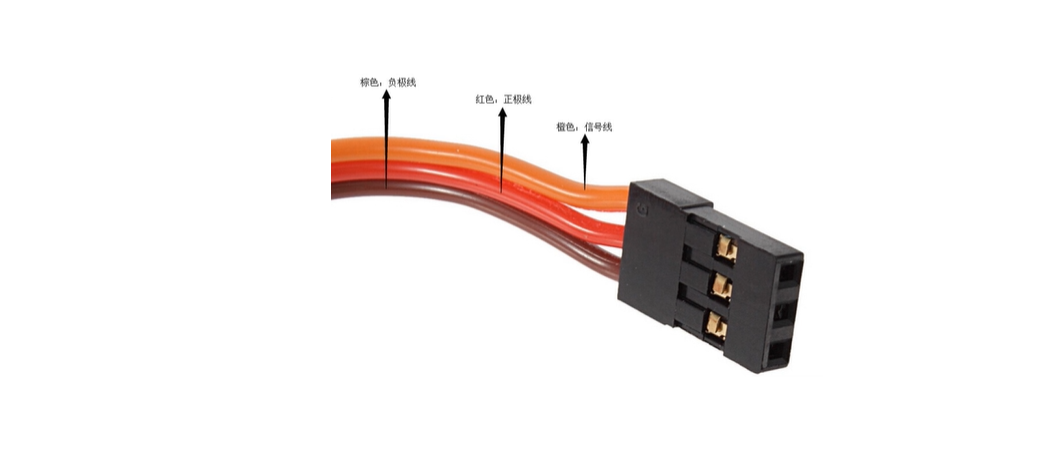
棕色接地 中间红线5v 橙色信号线
舵机的主要组成部分为伺服电机,所谓伺服就是服从信号的要求而动作。在信号来之前,转子停止不动;信号来到之后,转子立即运动。因此我们就可以给舵机输入不同的信号,来控制其旋转到不同的角度。 舵机接收的是PWM信号,当信号进入内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,使电压差为零时,电机停转,从而达到伺服的效果。简单来说就是给舵机一个特定的PWM信号,舵机就可以旋转到指定的位置。 舵机上有三根线,分别是GND(棕线)、VCC(红线)和SIG(橙线),也就是地线、电源线和信号线,其中的PWM波就是从信号线输入给舵机的。
一般来说,舵机接收的PWM信号频率为50HZ,即周期为20ms。当高电平的脉宽在0.5ms-2.5ms之间时舵机就可以对应旋转到不同的角度。如下图。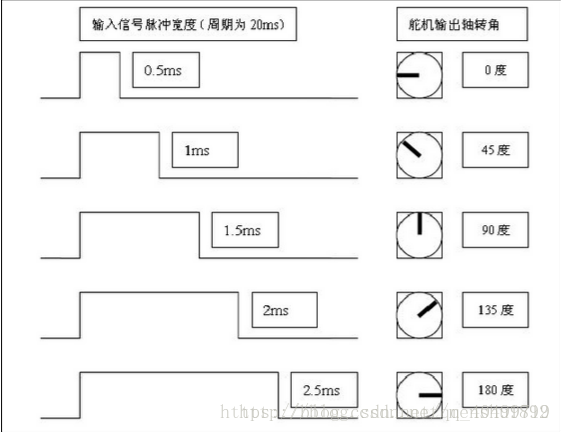
代码示例
以P01对应的PWM6为例
配置PWM环境,这里需要使用修改后的,支持分频系数的PWM依赖库:
PWM.CPWM.h
初始化PWM
#include "config.h"#include "delay.h"#include "GPIO.h"#include "PWM.h"#include "UART.h"#include "Exti.h"#include <stdio.h>char putchar(char dat){TX1_write2buff(dat);return dat;}#define MOTOR P01// 分频系数:可以是1~65535中的任意值#define Prescaler 10// 频率#define PREQ 50// 保证分母 >= 367#define PERIOD (MAIN_Fosc / (PREQ * Prescaler))void GPIO_config(void){GPIO_InitTypeDef GPIO_InitStructure; // 结构定义GPIO_InitStructure.Pin = GPIO_Pin_1; // 指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; // 指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P0, &GPIO_InitStructure); // 初始化GPIO_InitStructure.Pin = GPIO_Pin_2; // 指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; // 指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P3, &GPIO_InitStructure); // 初始化}void PWM_config(void){PWMx_InitDefine PWMx_InitStructure;// 总配置// (MAIN_Fosc / 1000) - 1 周期计数值// 配置分频系数,必须使用改进后的PWM.h和PWM.C文件PWMx_InitStructure.PWM_Prescaler = Prescaler - 1;PWMx_InitStructure.PWM_Period = PERIOD - 1; // 周期时间, 0~65535PWMx_InitStructure.PWM_DeadTime = 0; // 死区发生器设置, 0~255PWMx_InitStructure.PWM_EnoSelect = ENO6P; // 输出通道选择, ENO1P,ENO1N,ENO2P,ENO2N,ENO3P,ENO3N,ENO4P,ENO4N / ENO5P,ENO6P,ENO7P,ENO8PPWMx_InitStructure.PWM_PS_SW = PWM6_SW_P01; // 切换端口// 具体PWM端口配置// pwm6PWMx_InitStructure.PWM6_Mode = CCMRn_PWM_MODE1; // 模式, CCMRn_FREEZE,CCMRn_MATCH_VALID,CCMRn_MATCH_INVALID,CCMRn_ROLLOVER,CCMRn_FORCE_INVALID,CCMRn_FORCE_VALID,CCMRn_PWM_MODE1,CCMRn_PWM_MODE2PWMx_InitStructure.PWM6_Duty = 0; // PWM4占空比时间, 0~Period// pwm6PWMx_InitStructure.PWM_CC6Enable = ENABLE; // 开启PWM6P输入捕获/比较输出, ENABLE,DISABLE// PWM启动配置PWMx_InitStructure.PWM_MainOutEnable = ENABLE; // 主输出使能, ENABLE,DISABLEPWMx_InitStructure.PWM_CEN_Enable = ENABLE; // 使能计数器, ENABLE,DISABLEPWM_Configuration(PWMB, &PWMx_InitStructure); // 初始化PWM, PWMA,PWMB}
初始化UART打印日志
void UART_config(void){COMx_InitDefine COMx_InitStructure; // 结构定义COMx_InitStructure.UART_Mode = UART_8bit_BRTx; // 模式, UART_ShiftRight,UART_8bit_BRTx,UART_9bit,UART_9bit_BRTxCOMx_InitStructure.UART_BRT_Use = BRT_Timer1; // 选择波特率发生器, BRT_Timer1, BRT_Timer2 (注意: 串口2固定使用BRT_Timer2)COMx_InitStructure.UART_BaudRate = 115200ul; // 波特率, 一般 110 ~ 115200COMx_InitStructure.UART_RxEnable = ENABLE; // 接收允许, ENABLE或DISABLECOMx_InitStructure.BaudRateDouble = DISABLE; // 波特率加倍, ENABLE或DISABLECOMx_InitStructure.UART_Interrupt = ENABLE; // 中断允许, ENABLE或DISABLECOMx_InitStructure.UART_Priority = Priority_0; // 指定中断优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3COMx_InitStructure.UART_P_SW = UART1_SW_P30_P31; // 切换端口, UART1_SW_P30_P31,UART1_SW_P36_P37,UART1_SW_P16_P17,UART1_SW_P43_P44UART_Configuration(UART1, &COMx_InitStructure); // 初始化串口1 UART1,UART2,UART3,UART4}
初始化外部中断Exti
用于监听按钮P32的按下事件
void Exti_config(void){EXTI_InitTypeDef Exti_InitStructure; // 结构定义Exti_InitStructure.EXTI_Interrupt = ENABLE; // 中断使能, ENABLE或DISABLEExti_InitStructure.EXTI_Mode = EXT_MODE_Fall; // 中断模式, EXT_MODE_RiseFall,EXT_MODE_FallExti_InitStructure.EXTI_Priority = Priority_0; // 中断使能, ENABLE或DISABLEExt_Inilize(EXT_INT0, &Exti_InitStructure); // 初始化}
替换Exti.c文件:Exti.hExti.c
处理按钮按下事件
u16 duty_percent = 500; // 500us -> 2500usvoid ext_int0_call(){static int step = 500;float angle = 0;PWMx_Duty duty;// 500 -> 0°// 1000 -> 45°// 1500 -> 90°// 2000 -> 135°// 2500 -> 180°delay_ms(10);if (P32){// 延时10ms后,依然低电平,才执行。消除抖动return;}// 修改占空比 0 -> 100duty_percent += step;if (duty_percent >= 2500){step = -500;}else if (duty_percent <= 500){step = 500;}// 计算不同的占空比对应的角度值,用于打印angle = (duty_percent - 500) * 180.0f / 2000;printf("duty_percent: %d angle: %.1f \r\n", (int)duty_percent, angle);// 设置占空比duty.PWM6_Duty = PERIOD * duty_percent / 20000;UpdatePwm(PWMB, &duty);}
main函数
void main(){PWMx_Duty duty;GPIO_config();UART_config();PWM_config();Exti_config();EA = 1;P32 = 1;duty.PWM6_Duty = PERIOD * duty_percent / 20000;UpdatePwm(PWMB, &duty);while (1){delay_ms(10);}}
完整工程代码:
舵机_PWM.zip

若有收获,就点个赞吧
0 人点赞
