1.马达()以速度()转动

(1)功能:使马达以指定速度运转
(2)参数值:1-4,马达连接端口
(3)参数值:-100-100,马达速度数值越大速度越快,0停止,小于0则反转,大于0则正转
(4)范例:原地旋转机器人
机器人以50速度原地旋转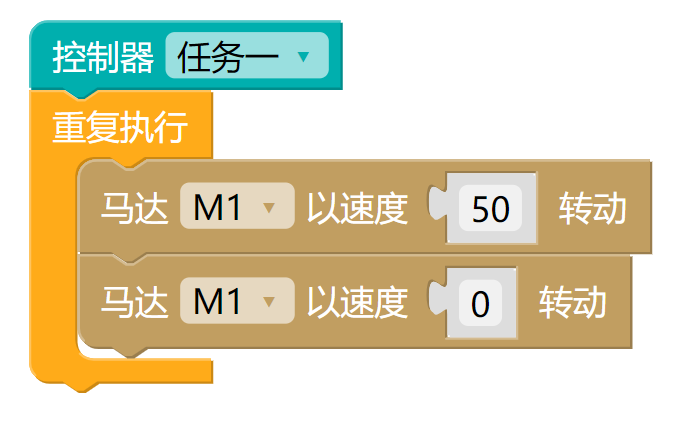
import rcudef task1():while True:rcu.SetMotor(1,50)rcu.SetMotor(2,0)task1()
2.马达()编码器数值

(1)功能:读取马达编码器数值,起到记录马达转动角度的作用
(2)参数值:1-4,马达连接端口
(3)返回值:马达转动的角度值,数值1表示转动1度,有正负区分
(4)范例:转一圈后停止转动
马达以50速度转动,编码器数值大于360后,马达停止转动
import rcudef task1():rcu.SetMotor(1,50)while not (rcu.GetMotorCode(1)>360):passrcu.SetMotor(1,0)task1()
3.马达()编码器归零

(1)功能:将编码器记录的数值清零
(2)参数值:1-4,马达连接端口
(3)范例:来回转动
用马达转动的角度值,控制马达正传或反转,在马达转动超过一圈后,编码器记录清零,马达进行反方向转动,实现来回移动
import rcudef task1():rcu.SetMotor(1,50)while True:if (rcu.GetMotorCode(1)>360):rcu.SetMotorCode(1);rcu.SetMotor(1,-50)if (rcu.GetMotorCode(1)<-360):rcu.SetMotorCode(1);rcu.SetMotor(1,50)task1()
4.设置伺服马达()以速度()旋转()

(1)功能:设置马达转动到指定角度
(2)参数值:1-4,马达连接端口
(3)参数值:-100-100,马达速度
(4)参数值:0-3600,马达旋转的角度
(5)范例:设置马达按指定速度转动到特定角度
马达M1以速度100转动一圈
import rcudef task1():rcu.SetMotorServo(1,100,360)task1()
5.等待伺服马达()以速度()旋转()

(1)功能:等待马达转动到指定角度,再执行下方程序
(2)参数值:1-4,马达连接端口
(3)参数值:-100-100,马达速度
(4)参数值:0-3600,马达旋转的角度
(5)范例:来回转动
马达循环执行反转完90度后,再正转90度
import rcudef task1():while True:rcu.SetWaitForAngle(1,-100,90)rcu.SetWaitForAngle(1,100,90)task1()
6.马达()()以速度()编码()前进

(1)功能:使两个马达同步转动指定编码
(2)参数值:1-4,马达连接端口
(3)参数值:1-4,马达连接端口
(4)参数值:-100-100,马达速度
(5)参数值:0-2147483647,马达旋转的脉冲
(6)范例:机器人往前移动
马达M1和M2同时以50的速度转动2圈,实现往前移动
import rcudef task1():rcu.SetMotorStraightAngle(1,2,50,720)task1()
7.马达()()以速度()编码()转弯

(1)功能:使两个马达同步反向转动指定编码
(2)参数值:1-4,马达连接端口
(3)参数值:1-4,马达连接端口
(4)参数值:-100-100,马达速度
(5)参数值:0-2147483647,马达旋转的脉冲
(6)范例:原地掉头
马达M1正转360度,马达M2反转360度,实现掉头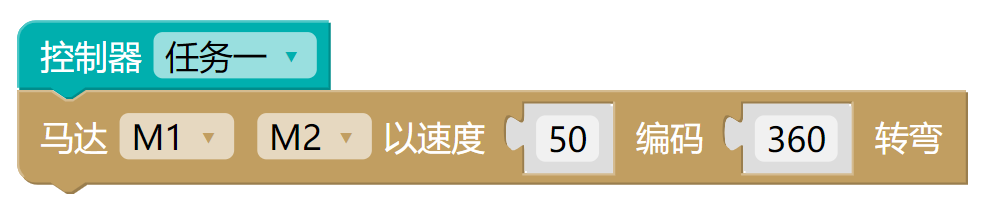
import rcudef task1():rcu.SetCarTurn(1,2,50,360)task1()
8.马达功率M1()M2()M3()M4()

(1)功能:调整多个马达设置为指定功率比
(2)参数值:-100-100,各马达功率百分比
(3)范例:各马达按不同功率转动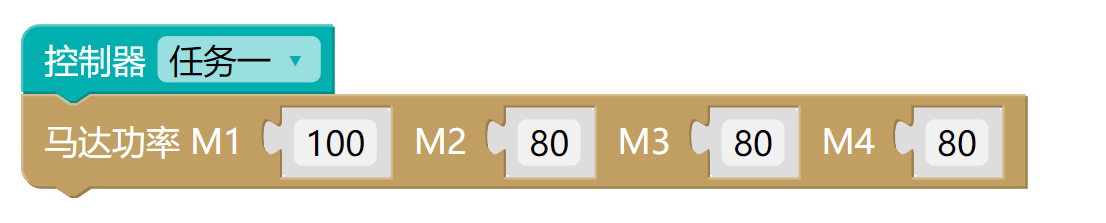
import rcudef task1():rcu.SetMotorPower(100,80,80,80);task1()
9.设置双马达走直线()()速度()

(1)功能:使两个马达同步转动
(2)参数值:1-4,马达连接端口
(3)参数值:1-4,马达连接端口
(4)参数值:-100-100,马达速度
(5)范例:往前直走
马达M1和M2均往同一方向同一速度转动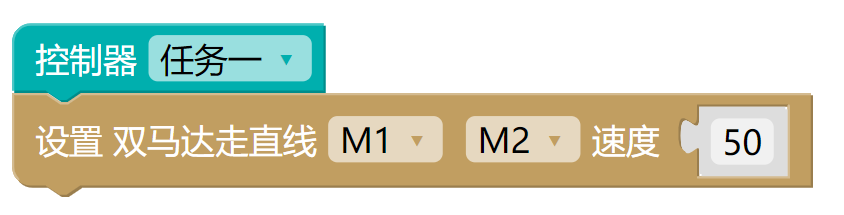
import rcudef task1():rcu.SetMotorStraight(1,2,50);task1()
10.设置双马达走同步转弯()()速度()角度()

(1)功能:使两个马达同步转动指定角度
(2)参数值:1-4,马达连接端口
(3)参数值:1-4,马达连接端口
(4)参数值:-100-100,马达速度
(5)参数值:0-3600,马达旋转的角度
(6)范例:移动转弯
马达M1和M2以整体速度为50,圆心角60度,不停转向移动
import rcudef task1():rcu.SetMotorStraightTurn(1,2,50,60);task1()

若有收获,就点个赞吧
0 人点赞
