按键传感器

模块简介
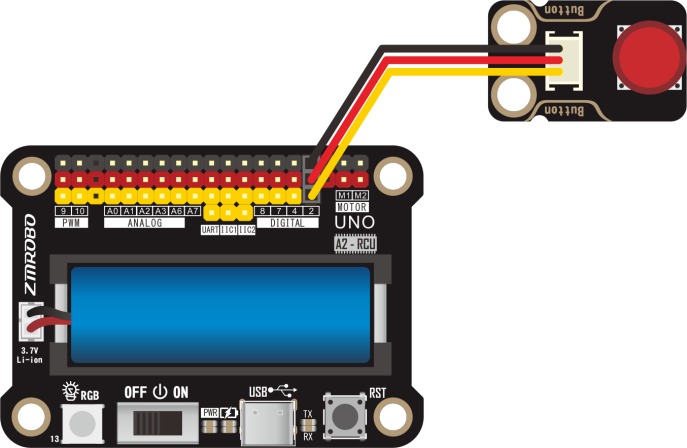
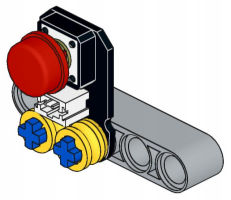
按键传感器是一种控制型电子部件,常用来接通或断开“控制电路”。按下按钮时,电路就接通,松开按钮时,电路就断开。它属于数字型传感器,只有开和关两种状态。
产品参数
接线示意
测试程序
使用串口监视器查看按键传感器返回的数值。当按键被按下时返回0,松开时返回1。
ZMROBO-2.0
Arduino IDE
| 函数说明 | |
|---|---|
| setUart(baud,value) | 串口发送整型数值。baud为波特率,value为数值。 |
| getDigitalPin(port) | 读取数字端口的数值。port为数字端口号。 |
| setDelay_ms(time) | 等待指定时间。time为时长,单位是毫秒(ms)。 |
| 程序代码 | |
| #include void setup() { } |
void loop() { setUart(57600,getDigitalPin(2)); setDelay_ms(200); } |
可能遇到的问题
| 问题 | 处理方法 |
|---|---|
| 按键传感器没有返回数值 | - 检查程序或接线是否正确 - 观察按下按键时指示灯是否会亮起 |
| 若无法解决以上问题或者有其他问题,请联系客服帮忙解决。 |
RGB彩灯
模块简介
RGB彩灯也称为全彩LED灯,能发出多种颜色的光。它内置了红(Red)、绿(Green)和蓝(Blue)三种颜色的灯珠,根据三原色的原理调出多种颜色。常见的LED大屏幕都是利用这种原理进行调色,呈现出多彩的效果。
产品参数
工作电压:5V
连接控制器端口:数字端口
亮度值范围:0~255
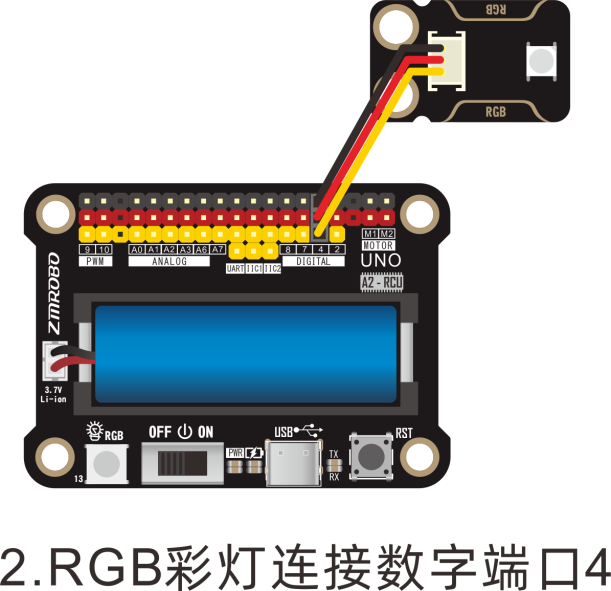
接线示意
测试程序
使RGB彩灯交替闪烁红蓝光。
ZMROBO-2.0
Arduino IDE
| 函数说明 | |
|---|---|
| setRGBSmallLed(port,R,G,B) | 使RGB彩灯发光。port为数字端口号。R为红色数值,G为绿色数值,B为蓝色数值,数值范围为0~255。 |
| 程序代码 | |
| #include void setup() { } |
void loop() { setRGBSmallLed(4,50,0,0); setDelay_ms(1000); setRGBSmallLed(4,0,0,50); setDelay_ms(1000); } |
可能遇到的问题
| 问题 | 处理方法 |
|---|---|
| RGB彩灯不亮 | - 检查程序或接线是否正确 |
| 若无法解决以上问题或者有其他问题,请联系客服帮忙解决。 |
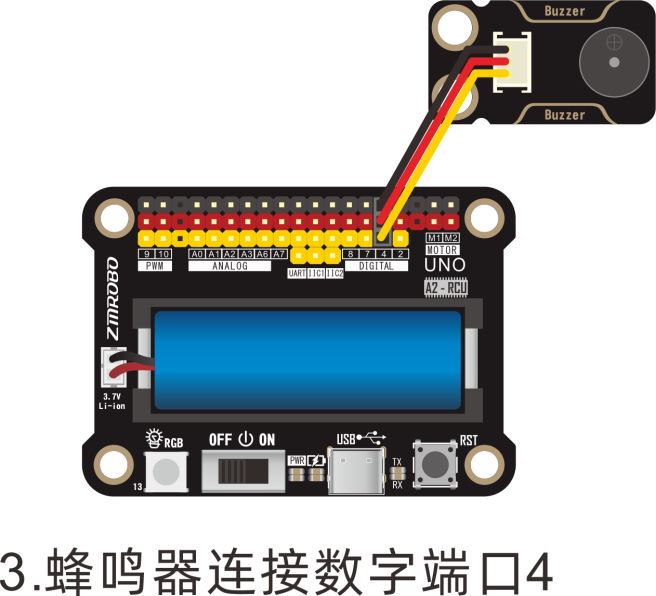
蜂鸣器
模块简介
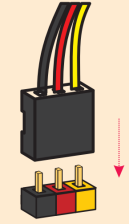
蜂鸣器是Arduino中最简单的发声装置,只要给它一定频率的脉冲信号就能够让它发出“嘀”的声音,也可以通过不同频率的脉冲信号让它发出不同音阶的声音。蜂鸣器被广泛应用于计算机、打印机、复印机、报警器、电子玩具、汽车电子设备、定时器等电子产品中作发声器件。
产品参数
接线示意
测试程序
使蜂鸣器依次播放“Do”、“Re”、“Mi”三个音调的声音。
ZMROBO-2.0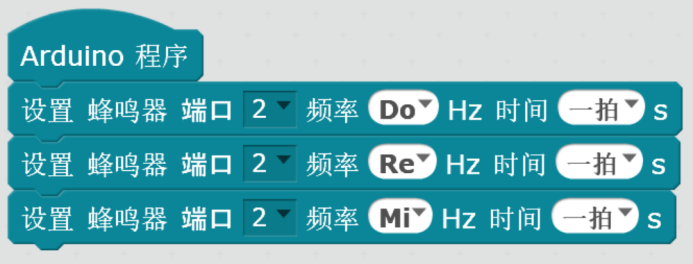
Arduino IDE
| 函数说明 | |
|---|---|
| setMusicOUT(port,frequency,time) | 使蜂鸣器发声。port为数字端口号,frequency为频率,time为的时长(单位为秒)。 |
| 程序代码 | |
| #include void setup() { setMusicOUT(2,523,1); setMusicOUT(2,587,1); setMusicOUT(2,659,1); } |
void loop() { } |
可能遇到的问题
| 问题 | 处理方法 |
|---|---|
| 蜂鸣器没有发声 | - 检查程序或接线是否正确 |
| 若无法解决以上问题或者有其他问题,请联系客服帮忙解决。 |
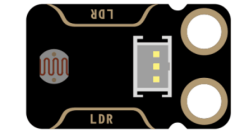
光敏传感器
模块简介
光敏传感器也叫光线传感器,上面装有光敏电阻,可以检测周围环境的光线强度,并转化为模拟信号。因为光敏传感器会根据感应到的光线明暗变化,而输出不同的数值。通常用来制作根据光线强度变化而产生不同效果的光控产品。
产品参数
工作电压:5V
连接控制器端口:模拟端口
返回数值范围:0~1023
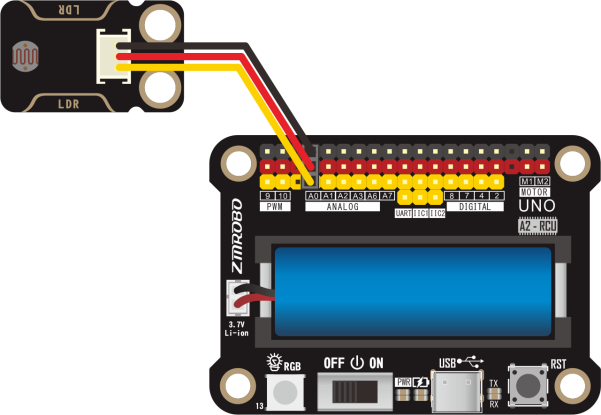
接线示意
测试程序
使用串口监视器查看光敏传感器的返回数值。
ZMROBO-2.0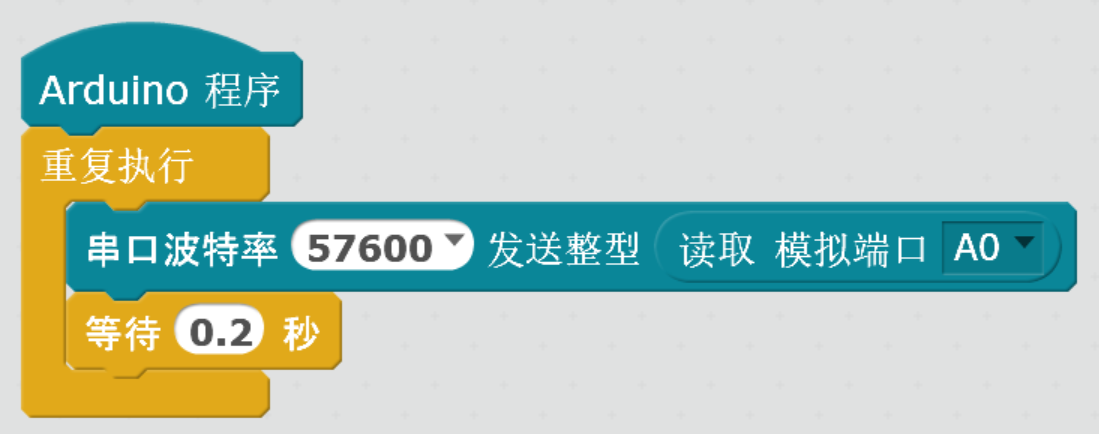
Arduino IDE
| 函数说明 | |
|---|---|
| getAnalogPin(port) | 读取模拟端口的数值。port为模拟端口号。 |
| 程序代码 | |
| #include void setup() { } |
void loop() { setUart(57600,getAnalogPin(A0)); setDelay_ms(200); } |
可能遇到的问题
| 问题 | 处理方法 |
|---|---|
| 光敏传感器没有返回数值 | - 检查程序或接线是否正确 |
| 若无法解决以上问题或者有其他问题,请联系客服帮忙解决。 |
声音传感器

模块简介
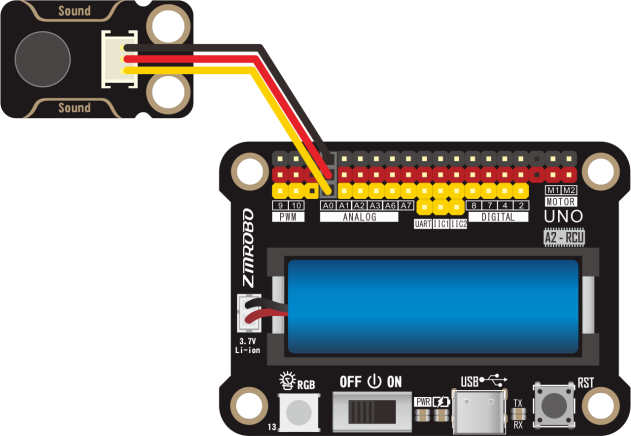
声音传感器是一个神奇的电子耳朵。因为它上面装有麦克风,所以可以用来对周围环境的声音强度进行检测,并转化为模拟信号,检测到的声音越大,输出的信号越强。它通常用来制作一些带有声控功能的装置。
产品参数
工作电压:5V
连接控制器端口:模拟端口
返回数值范围:0~1023
接线示意
测试程序
使用串口监视器查看声音传感器的返回数值。
ZMROBO-2.0
Arduino IDE
| 程序代码 | |
|---|---|
| #include void setup() { } |
void loop() { setUart(57600,getAnalogPin(A0)); setDelay_ms(200); } |
可能遇到的问题
| 问题 | 处理方法 |
|---|---|
| 声音传感器没有返回数值 | - 检查程序或接线是否正确 |
| 若无法解决以上问题或者有其他问题,请联系客服帮忙解决。 |
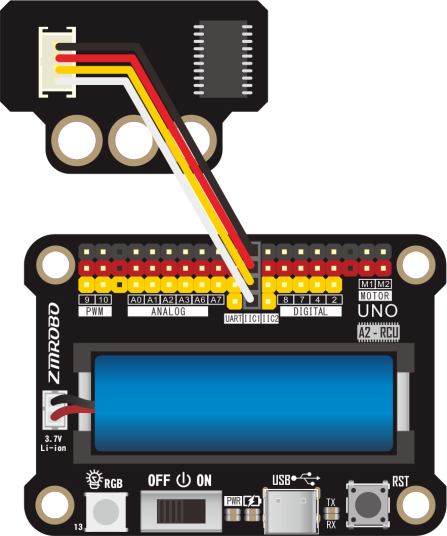
数码管

模块简介
数码管是一种由多个LED灯封装在一起组成“8”字型的器件,可以显示数字和其他信息的电子设备。图中的数码管模块可显示4位数的数值,工作时呈红色灯光。
产品参数
接线示意
测试程序
使数码管显示1234。
ZMROBO-2.0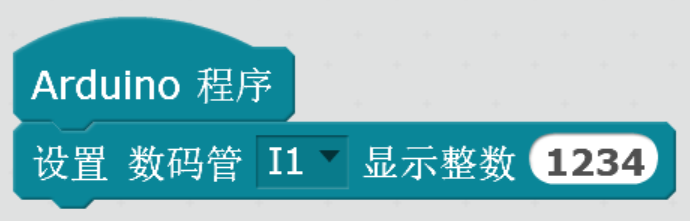
Arduino IDE
| 函数说明 | |
|---|---|
| setTM1637(port,value) | 使数码管显示数值。port为IIC端口号,value为数值,最多显示4位数。 |
| 程序代码 | |
| #include void setup() { setTM1637(I1,1234); } |
void loop() { } |
可能遇到的问题
| 问题 | 处理方法 |
|---|---|
| 数码管没有显示数值 | - 检查程序或接线是否正确 |
| 若无法解决以上问题或者有其他问题,请联系客服帮忙解决。 |
超声波传感器
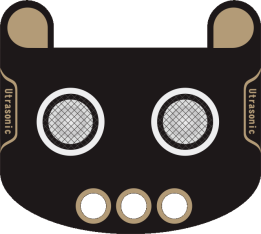
模块简介
超声波传感器是通过发射和接收超声波来测量与物体之间的距离。其工作原理是:超声波发射器向某一方向发射超声波,同时开始计时,超声波在空气中传播,途中碰到障碍物就会反射回来,接收器接收到反射波就立即停止计时,声音传播速度(空气中为340m/s)乘以来回时间的一半,就可计算出距离。
产品参数
工作电压:5V
连接控制器端口:IIC端口
有效量程:2cm~200cm
返回数值单位:厘米(cm)
接线示意
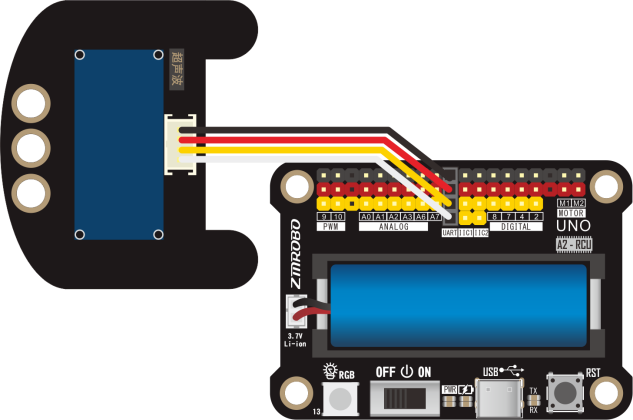
测试程序
使用串口监视器查看超声波传感器的返回数值。
ZMROBO-2.0
Arduino IDE
| 函数说明 | |
|---|---|
| HCSR04(port) | 读取超声波传感器测量数值。port为IIC端口号。 |
| 程序代码 | |
| #include void setup() { } |
void loop() { setUart(57600,HCSR04(I1)); setDelay_ms(200); } |
可能遇到的问题
| 问题 | 处理方法 |
|---|---|
| 超声波传感器没有返回数值 | - 检查程序或接线是否正确 |
| 若无法解决以上问题或者有其他问题,请联系客服帮忙解决。 |
马达
模块简介
马达,又称电机。它是机器人或机械运动装置中的动力来源。主要提供动力机械能,使机器能够运转起来。可以通过编程控制马达正转或反转。
产品参数
类型:直流减速马达
工作电压:最高7.2V
工作电流:最高130mA
连接控制器端口:马达端口
转速:100±10% rpm
接线示意
测试程序
使马达重复“正转1秒,反转1秒”。
ZMROBO-2.0
Arduino IDE
| 函数说明 | |
|---|---|
| setMotorPin(port,speed) | 使马达转动。port为马达端口号,speed为速度值。 |
| 程序代码 | |
| #include void setup() { } |
void loop() { setMotorPin(M1,100); setDelay_ms(1000); setMotorPin(M1,-100); setDelay_ms(1000); } |
可能遇到的问题
| 问题 | 处理方法 |
|---|---|
| 马达没有转动 | - 检查程序或接线是否正确 - 检查电池电量是否充足 |
| 若无法解决以上问题或者有其他问题,请联系客服帮忙解决。 |
AI视觉模块
模块简介
AI视觉模块是一个集成人工智能算法的电子部件,是机器对外界信息识别的基础。其前方有一个高清摄像头,可以对许多类图像进行识别,如人脸、手势、图片、道路、球体、颜色等。
产品参数
工作电压:5V
工作电流:350mA以上
连接控制器端口:IIC1端口
摄像头:200W像素,可视角度80°
显示屏:1.54寸,240240
尺寸:50mm50mm*36mm
三向拨轮
AI视觉模块的侧边有一个拨轮,可上滑(A键)或下滑(B键)切换选项,按下(C键)可确定选项或者拍摄照片。有9种功能模式可以通过三向拨轮按键来手动选择使用,其他的功能需要通过编程来配置使用。
注意:关机断电时,需要上滑并长按A键退出当前模式,否则可能会损坏存档文件,导致下次无法进入当前模式。 
功能模式
AI视觉模块拥有12种功能模式,分别为颜色检测、二维码识别、小球识别、道路识别、人脸检测、图像分类、标签码识别、颜色识别学习、人脸识别学习、手势识别、图像分类学习、交通标志识别。其中有9种功能模式可以通过三向拨轮按键来手动选择,其他的功能模式需要通过编程来设置。
通过编程控制时,需等待AI视觉模块开机完成后,才能设置其功能模式。使用Arduino IDE编写程序时,可使用SetAICamData(参数,0)函数进行功能模式设置。
以下是各个功能模式的详细介绍:
| 功能模式 | 说明 | 数据位 | 参数 |
|---|---|---|---|
| 颜色检测 | 可以检测红、绿、蓝、黄四种颜色,返回相应颜色的目标数量。按下C键可以开启补光灯,按下B键可以关闭补光灯。 | 1(红)、2(绿)、3(蓝)、4(黄) | 2 |
| 二维码识别 | 可以识别0-230的数字二维码,返回相应的数值。 | 1 | 3 |
| 小球识别 | 可以识别出红、绿、蓝、黄四种颜色的小球,返回小球在屏幕中的X、Y坐标值。 | 1(X坐标)、2(Y坐标) | 4 |
| 道路识别 | 可以识别黑线,返回黑线的偏移值,无黑线时返回0。 | 1 | 5 |
| 人脸检测 | 可以识别是否有人脸存在,返回人脸在屏幕中的X、Y坐标以及大小。 | 1(X坐标)、2(Y坐标)、3(大小) | 6 |
| 图像分类 | 可以识别固定的3种图像,返回相应的ID号。 | 1 | 7 |
| 标签码识别 | 可以识别固定的10种标签码,返回相应的ID号。 | 1 | 8 |
| 颜色识别学习 | 可以学习识别4种颜色,返回相应的ID号。进入该模式后,使屏幕中间的白色框对着需要学习的颜色,按下C键,即可一键学习。学习成功后,屏幕会显示相应的ID号。重复这样的操作,可以学习4种颜色。按B键可以选择需要学习的ID号,短按A键可清除所有学习的颜色。 | 1 | 9 |
| 人脸识别学习 | 可以学习识别10张人脸,并返回相应的ID号。进入该模式后,将摄像头对着人脸,屏幕出现一个红色框,按下C键,即可一键学习,学习成功后,会显示相应的ID号。重复这样的操作,可以学习10张人脸。断电后会清除数据,短按A键可清除全部学习的人脸。 | 1 | 10 |
| 手势识别 | 可以识别石头、剪刀和布3种固定方向的手势,返回相应的ID号。 | 1 | 11 |
| 图像分类学习 | 可以学习识别4种不同的图像或者物体,返回相应的ID号。使用该模式时,让整个学习对象出现在屏幕画面中,按下C键学习ID1,再更换学习对象,用相同的方法分别学习ID2、ID3、ID4。学习完4种学习对象后,会进入获取样张模式,分别对4种学习对象获取不同角度的样张,最多支持200张样张,样张越多,识别越准确,具体操作:分别对着学习对象按下C键拍照,按下B键可以提前结束。获取样张完成后,即可识别出相应的物体。断电不会清除数据,短按A键可清除全部学习的ID。 | 1 | 12 |
| 交通标志识别 | 可以识别5种交通标志,并返回相应的ID号。 | 1 | 13 |
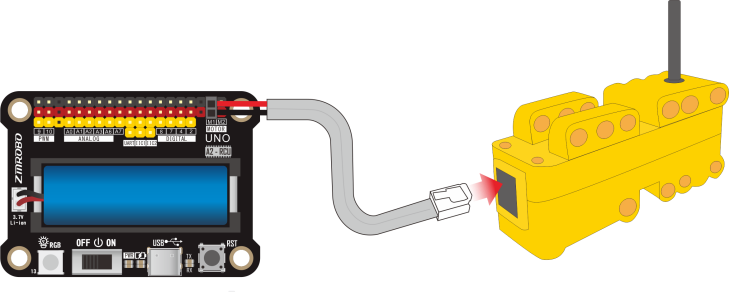
接线示意
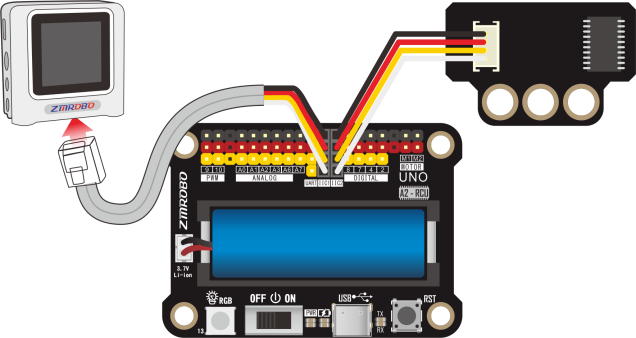
测试程序
使用数码管查看AI视觉模块检测红色目标数量时的返回数值。
ZMROBO-2.0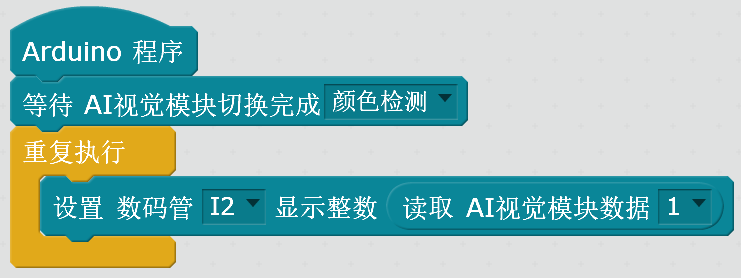
Arduino IDE
| 函数说明 | |
|---|---|
| SetWaitForAICamData(mode,0) | 等待AI视觉模块切换到指定模式。mode为模式。 |
| GetAICamData(data) | 读取指定数据位的数值。data为数据位。 |
| 程序代码 | |
| #include void setup() { SetWaitForAICamData(2,0); } |
void loop() { setTM1637(I2,GetAICamData(1)); } |
可能遇到的问题
| 问题 | 处理方法 |
|---|---|
| AI视觉模块没有返回数值 | - 检查程序或接线是否正确 - 调整摄像头位置直到识别到目标物体 |
| AI视觉模块无法正常工作 | - 检查电池电量是否充足 - 退出当前功能模式后重新打开控制器电源 |
| AI视觉模块发热 | - AI视觉模块功耗较高,发热是正常现象,注意散热即 |
可。长时间不使用时,应将其断电。 | | 若无法解决以上问题或者有其他问题,请联系客服帮忙解决。 | |
积木件
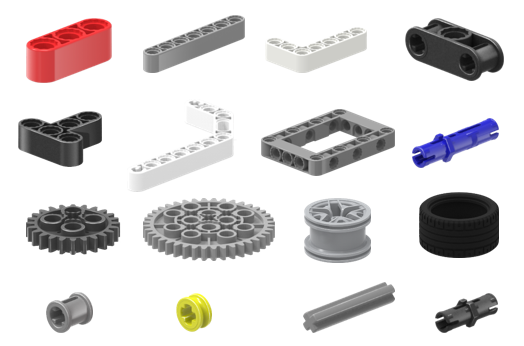
积木简介
积木种类丰富多样,便于快速搭建作品的结构和外观,然后将电子模块安装到积木作品上,无需使用螺丝连接。
产品参数
- 材质:塑料
- 规格:10mm
常用的拼接方式
| 固定连接
(使用实销) |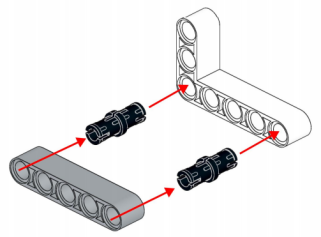
 |
| —- | —- |
| 活动连接
|
| —- | —- |
| 活动连接
(使用虚销) |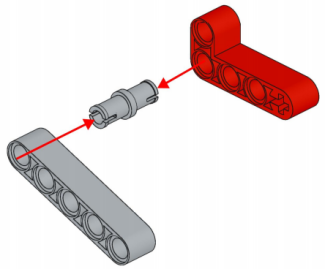
 |
| 转接件使用 |
|
| 转接件使用 | 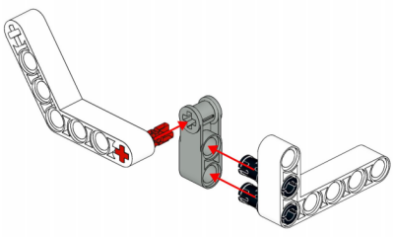
 |
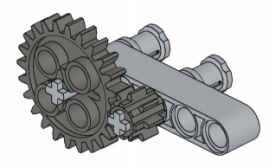
| 齿轮传动 |
|
| 齿轮传动 | 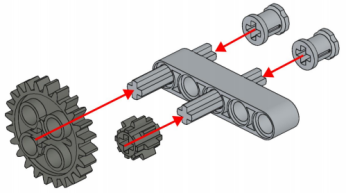
 |
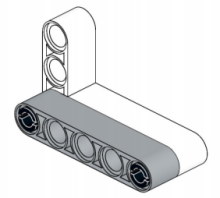
| 电子模块固定 |
|
| 电子模块固定 | 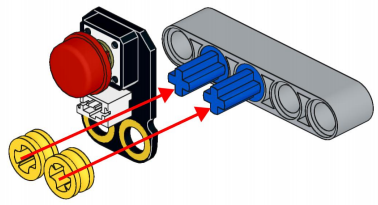
 |
|
可能遇到的问题
| 问题 | 处理方法 |
|---|---|
| 结构不牢固 | - 检查连接处是否紧密 - 检查结构设计是否合理 |
| 积木连接太紧无法拆开 | - 尝试使用塑料工具小力撬开 - 不可使用暴力拆卸积木,避免损坏积木 |
| 若无法解决以上问题或者有其他问题,请联系客服帮忙解决。 |

若有收获,就点个赞吧
0 人点赞
