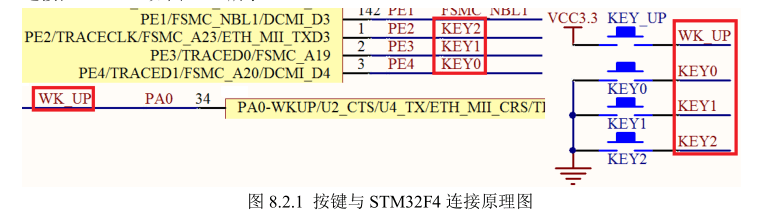
 这里需要注意的是:KEY0、KEY1 和 KEY2 是低电平有效的,而 KEY_UP 是高电平有效
这里需要注意的是:KEY0、KEY1 和 KEY2 是低电平有效的,而 KEY_UP 是高电平有效
的,并且外部都没有上下拉电阻,所以,需要在 STM32F4 内部设置上下拉。
利用位带操作 实现GPIO的控制
sys.h
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
key.h
声明 按键初始化函数void KEY_Init() 和 按键扫描函数u8 KEY_Scan(u8) 和 宏定义一些 语句
void KEY_Init(void); //IO 初始化u8 KEY_Scan(u8); //按键扫描函数#define KEY0 GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4) //PE4#define KEY1 GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_3) //PE3#define KEY2 GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_2) //PE2#define WK_UP GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0) //PA0#define KEY0_PRES 1#define KEY1_PRES 2#define KEY2_PRES 3#define WKUP_PRES 4
key.c
编写 按键初始化函数 和 按键扫描函数
void KEY_Init(void) //键盘初始化函数{GPIO_InitTypeDef GPIO_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA|RCC_AHB1Periph_GPIOE,ENABLE);//使能 GPIOA,GPIOE 时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4;//KEY0 KEY1 KEY2 对应引脚GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//普通输入模式GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MGPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉GPIO_Init(GPIOE, &GPIO_InitStructure);//初始化 GPIOE2,3,4GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//WK_UP 对应引脚 PA0GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN ;//下拉GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化 GPIOA0}//按键处理函数//返回按键值//mode:0,不支持连续按;1,支持连续按;//0,没有任何按键按下//1,KEY0 按下 2,KEY1 按下 3,KEY2 按下 4,WKUP 按下 WK_UP//注意此函数有响应优先级,KEY0>KEY1>KEY2>WK_UP!!u8 KEY_Scan(u8 mode){static u8 key_up=1;//按键按松开标志if(mode)key_up=1; //支持连按if(key_up&&(KEY0==0||KEY1==0||KEY2==0||WK_UP==1)){delay_ms(10);//去抖动key_up=0;if(KEY0==0)return 1;else if(KEY1==0)return 2;else if(KEY2==0)return 3;else if(WK_UP==1)return 4;}else if(KEY0==1&&KEY1==1&&KEY2==1&&WK_UP==0)key_up=1;return 0;// 无按键按下}
main.c
#include "key.h" // 将接口驱动头文件包含进来#include "delay.h"#include "led.h"#include "beep.h"int main(void){u8 key; //保存键值delay_init(168); //初始化延时函数LED_Init(); //初始化 LED 端口BEEP_Init(); //初始化蜂鸣器端口KEY_Init(); //初始化与按键连接的硬件接口LED0=0; //先点亮红灯while(1){key=KEY_Scan(0); //得到键值if(key){switch(key){case WKUP_PRES: //控制蜂鸣器BEEP=!BEEP;break;case KEY0_PRES: //控制 LED0 翻转LED0=!LED0;break;case KEY1_PRES: //控制 LED1 翻转LED1=!LED1;break;case KEY2_PRES: //同时控制 LED0,LED1 翻转LED0=!LED0;LED1=!LED1;break;}}else delay_ms(10);}}
效果为
按下key_up 蜂鸣器响,再次按下,停止响
按下key_0 DS0灭,再按亮
按下key_1 DS1亮 再按灭
按下key_2 DS1亮 DS0灭 再按下 DS0亮 DS1灭

若有收获,就点个赞吧
0 人点赞
