1.从搜索引擎说起:
机理略懂:依靠网络”蜘蛛”爬取分类,构建索引,供用户查找
2.查找
查找表(Search Table):被查数据元素(或记录)的集合。
关键字(Key):数据元素某个关键项的值,又称键值,(接触过SQL或PHP的话应该对键值熟悉)。比如数据库查询中id就是键值,当关键字唯一标识一个记录则是主关键字,可以识别多个数据元素的关键字是次关键字。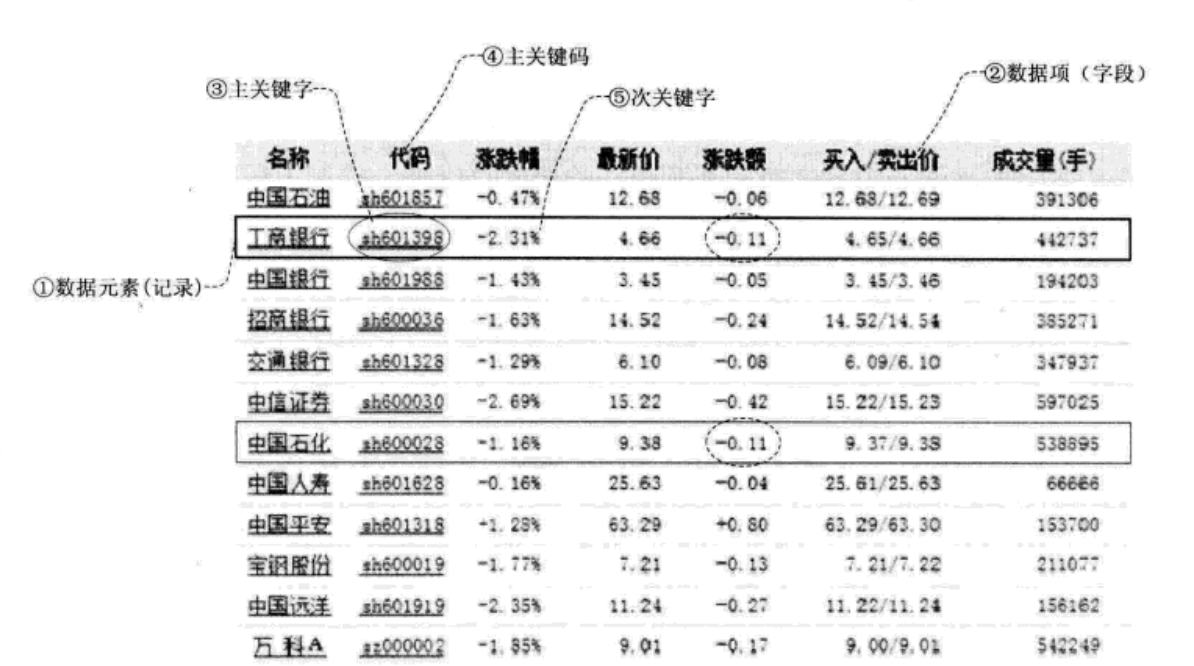
3.查找表的分类:
静态查找表:主要用于查找记录的位置或具体信息以及是否存在。
动态查找表:主要用于记录查找时的插入,删除。
静态查找表的例子:一段时间内表保持不变。(高考成绩表)。
动态查找表的例子:注销非法用户&网络热词的添加。
逻辑分析:查找基于的数据结构是集合,集合的记录之间本质上没有关系,因此想要获得较高的查找性能,就要改变数据元素之间的关系,建立表和树等结构。
顺序表查找 | 摆放图书
例子:散在地上的书[集合],摆成一列整齐的书(很随意的摆)[线性表],要查找某一本书,只能遍历查找。
以上的例子就是对线性表进行查找属于静态查找表。
顺序查找(Sequential Search):又叫线性查找,讲从第一个(最后一个开始),逐一与给定的值比较。
#include<stdio.h>#include<stdlib.h>/*a为数组,简单的线性表,n为记录个数,key是给定的关键字*/int Seqential_Search(int *a ,int n,int key){for(int i=1;i<=n;i++) //注意i从1开始,0是空出来的{if(a[i]==key)return i;}}int main(){int a[5+1]={0,1,2,5,4,3};int j=Seqential_Search(a,sizeof(a)/sizeof(int),5);return j;}
代码分析:这段代码很简单,i从1开始,但是却有缺陷,就是每次都有i<=n的比较来确保数组不会越界(题外话,数组越界可能会造成安全问题)。
代码优化:设置哨兵则可以避免每次关注i<=n,a[0]设置为“哨兵”(给定的比较标准),a[1]~a[n]为记录的线性表,从n开始与a[0]比较,返回1~n则查找成功,否则返回0,查找失败。“哨兵”的好处在于数据规模很大时,效率的提高比较可观。
代码时间复杂度分析(按有哨兵的分析):查找成功:最优情况:比较1次就找到(比如在第n个),时间复杂度O(1),最坏情况:比较n次(在第1个),时间复杂度O(n),查找失败:比较n+1次,时间复杂度O(n).平均好查找次数(n+1)/2.时间复杂度还是O(n).
代码使用场景分析:当数据量很小时,比较适用,当数据规模较大时查找效率低下,另外根据代码的特点,可以将常用的数据放在前面(如果是有哨兵的就放后面),不常用的放后面以此来大幅提高效率。
#include<stdio.h>#include<stdlib.h>/*含哨兵的顺序查找结构,避免对函数越界的担忧*/int Seqential_Search(int *a ,int n,int key){ a[0]=key;//设置哨兵int i=n;//从顺序表尾开始while(a[i]!=key)i--;return i;//返回0说明查找失败}int main(){int a[5+1]={0,1,2,5,4,3};int j=Seqential_Search(a,5,5);return j;}
有序表查找
 折半查找
折半查找
还是举书的例子,随机排成一列(线性表),按书名首字母排成一列(有序线性表),更有利于查找。
例子切入:猜一个100以内的整数,要求用最少的次数猜出。
折半查找:又叫二分查找(类似于二叉树的查找方法),要求线性表为有序线性表且为顺序存储(比如记录的关键码有序:从小到大),因为顺序存储具有随机访问的特性。主要思想就是取中间元素,如果与给定的值相等,则找到,比给定的值大于就找左半部分,比给定的值小就找右半部分,重复一开始的操作,直至找到。若查找区域无记录则查找失败。
int Binary_Search(int*a ,int n,int key){int low,high,mid;low=1;high=n;while(low<=high){mid=(low+high)/2;/*折半更新mid的值*/if(a[mid]<key) /*在右半部分,high不变,low为mid+1*/low=mid+1;else if(a[mid]>key)/*在左半部分,low不变,high为mid-1*/high=mid-1;elsereturn mid;/*相等返回位置信息*/}}
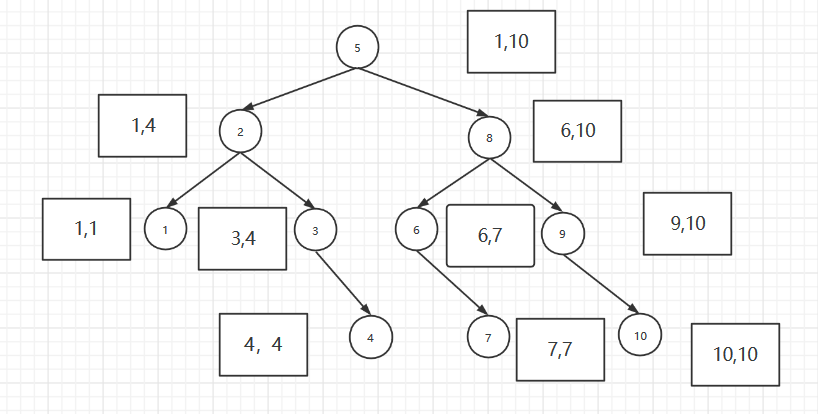
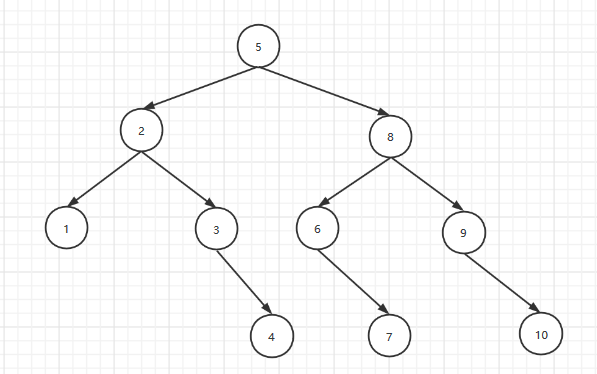
折半查找快速构建二叉树:
以index为标准1-10是元素的位置,方块中的为[low,high],特点:右子树只改变左端点=mid+1.左子树只改变右端点=mid-1
参考
算法分析:log2n向下去取整+1为层数,也是查找失败的次数,最好情况为1次。时间复杂度O(logn)
插值查找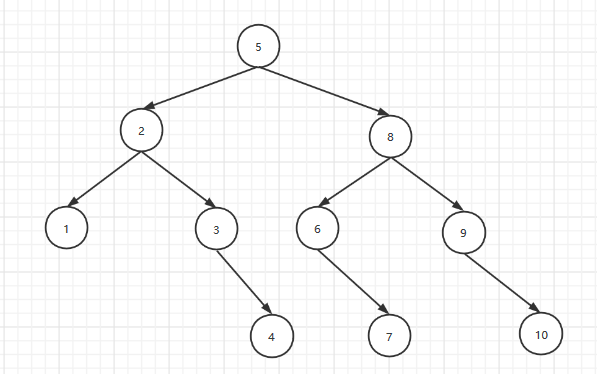
如果找10,按折半查找四次,mid=(high-low)/2,适当变形为mid=low+1/2(high-low),
这意味着是左端点+一半的区间,当换成左端点+适当区间,比如mid=low+(key-a[low]/a[high]-a[low])[high-low],拿10来说只需要找一次,key-a[low]/a[high]-a[low]是插值查找的核心。
算法适用场景:均匀的查找表,key-a[low]/a[high]-a[low]决定了如果遇到极端的数据{0,1,2000,…999999},比如key=2000,会导致第一查找偏后,这种情况下有悖插值算法的初衷,不太适用。
斐波那契查找(Fibonacci Search)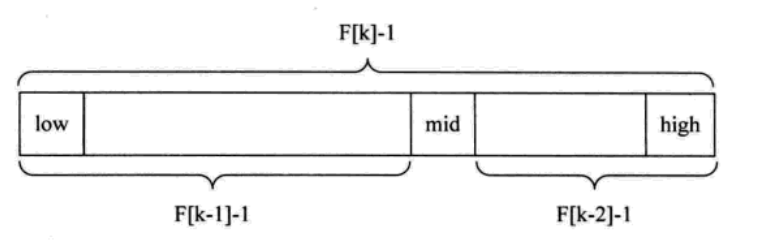
斐波那契数列特征:F(k)=F(k-1)+F(k-2)
#include"stdio.h"int F[11]={0,1,1,2,3,5,8,13,21,44,65};int Fibonacci_Search(int*a ,int n,int key){int low,high,mid,i,k;low=1;//定义最低位high=n;//定义最高位k=0;while(n>F[k]-1)k++; //计算n最斐波那契数列中的位置,全局数组的下标for(i=n;i<=F[k]-1;i++)a[i]=a[n];//填充至F[k]-1个,不足的用最后一个填充while(low<=high){mid=low+F[k-1]-1;//计算中间分割下标if(key<a[mid]){ high=mid-1;//最高值的移动k--;}else if(key>a[mid]){low=mid+1;//最低值移动k-=2;}else{if(mid<=n)return mid;//存在在非补充区域elsereturn n; //mid>n说明为补全值,返回n}}return 0;}void main( ){int a[11]={0,1,16,24,35,47,59,62,73,88,99};int j=Fibonacci_Search(a,10,16);printf("%d",j);}
算法分析:斐波那契查找的优势是确定在一个区域后会舍弃某一侧,时间复杂度为O(logn),在平均性能上斐波那契数列查找优于折半查找。

若有收获,就点个赞吧
0 人点赞
