说明:本章内容太啰嗦了,建议直接看小结和7.5节的算法实现。
本章内容
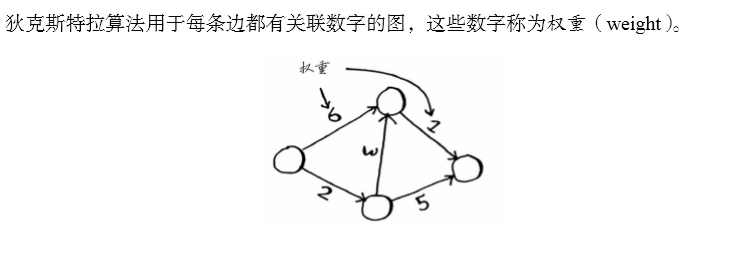
继续图的讨论,介绍加权图——提高或降低某些边的权重。
介绍狄克斯特拉算法,让你能够找出加权图中前往X的最短路径。
介绍图中的环,它导致狄克斯特拉算法不管用。
小结
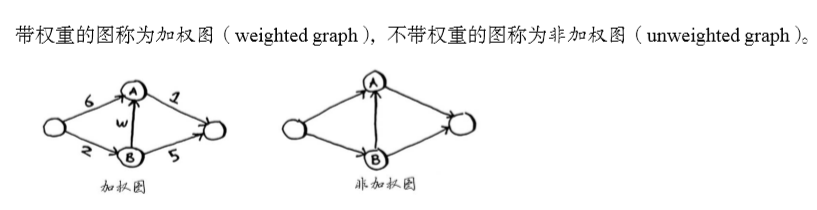
广度优先搜索用于在非加权图中查找最短路径。
狄克斯特拉算法用于在加权图中查找最短路径。
仅当权重为正时狄克斯特拉算法才有用。
如果图中包含负权重,请使用贝尔曼-福德算法
7.1 使用狄克斯特拉算法
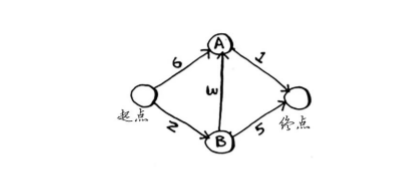
找出加权图中前往X的最短路。
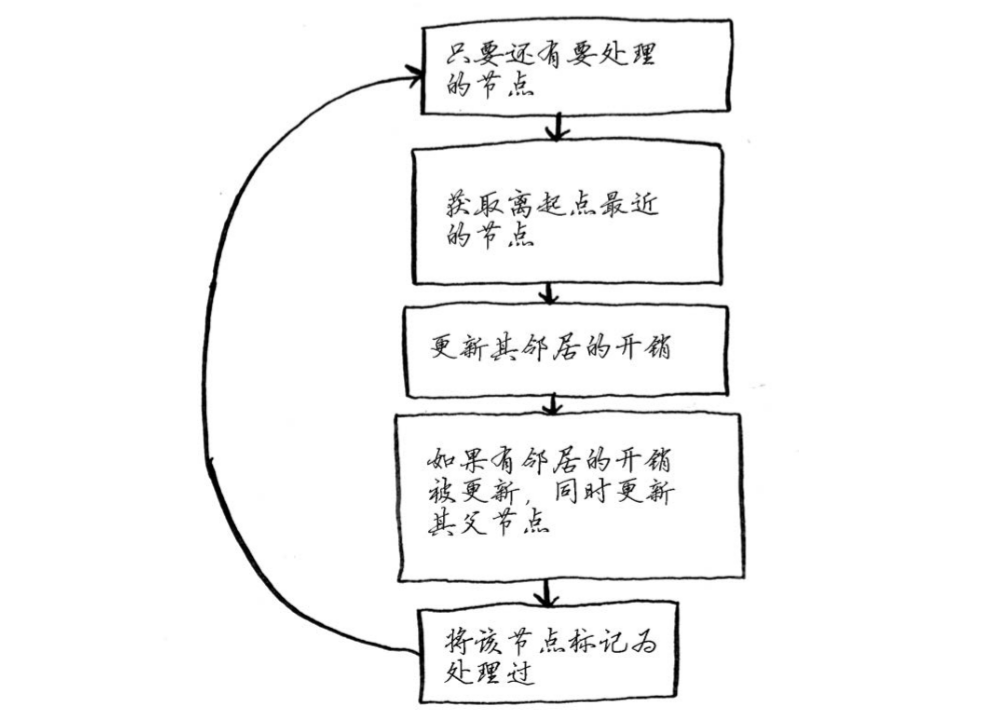
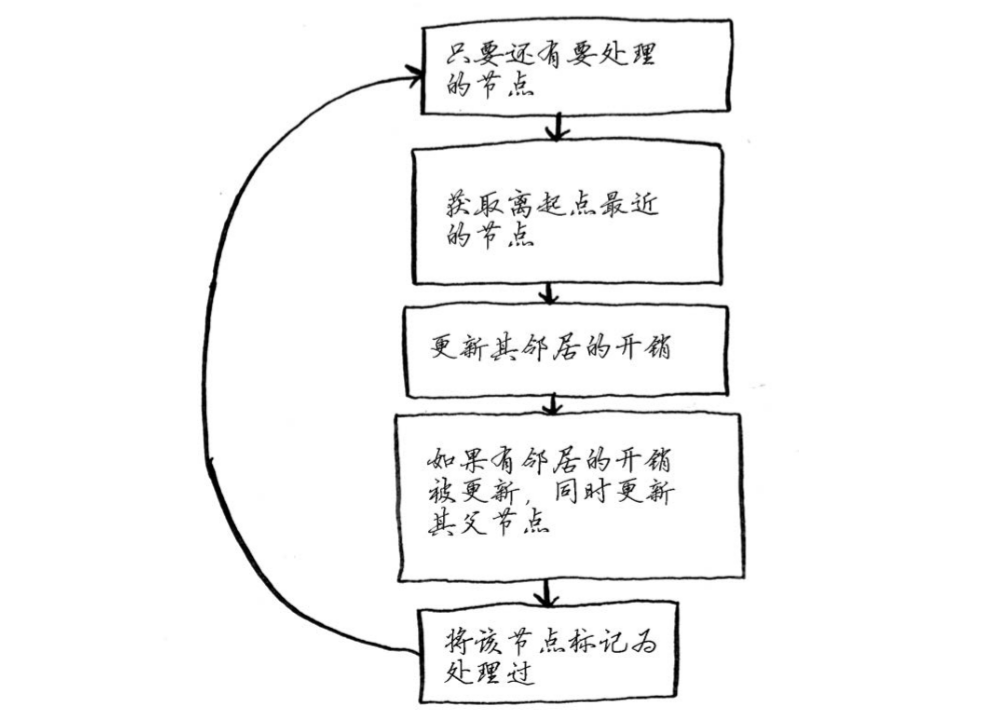
狄克斯特拉算法包含4个步骤
- 找出“最便宜”的节点,即可在最短时间内到达的节点。
- 对于该节点的邻居,检查是否有前往它们的更短路径,如果有,就更新其开销
- 重复这个过程,直到对图中的每个节点都这样做了。
- 计算最终路径。
- 实际的算法实现如下:(详见7.5实现部分)
距离向量算法?
如果你学过计算机网络的话,其中有一种路由算法,就是狄克斯特拉算法(Dijkstra)——距离向量算法。简单地说:我们需要利用每个节点到其邻居的代价,来不断地更新起点节点的”路由表”。
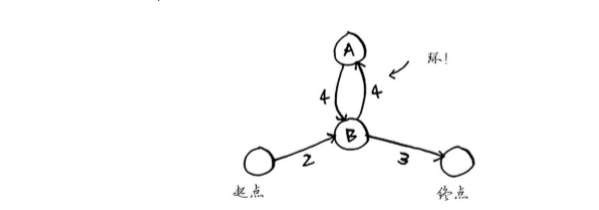
举个例子
第一步:找出最便宜的节点。

第二步:更新节点B的各个邻居的时间开销。
得到:起点—->B—>A 代价5。 起点—->B—->终点 代价5。更新起点的表。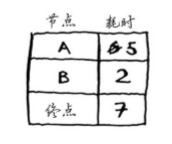
第三步:重复。
重复第一步:找出可在最短时间内前往的节点。你对节点B执行了第二步,除节点B外,可在最短时间内前往的节点是节点A。 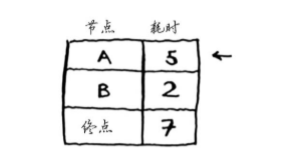
重复第二步:更新节点A的所有邻居的开销。
最后一步
计算最终路径将留到下一节去介绍,这里先直接将最终路径告诉你。 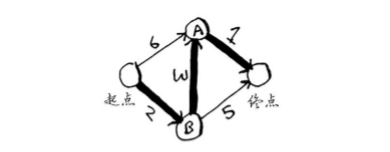
7.2 术语
权重
带环的加权图
在无向图中,每条边都是一个环。狄克斯特拉算法只适用于有向无环图(directed acyclic graph,DAG)。
无向图意味着两个节点彼此指向对方,其实就是环! 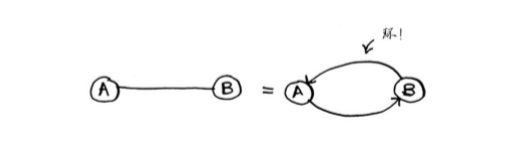
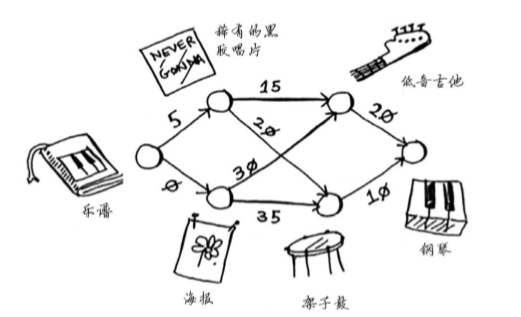
7.3 乐谱换钢琴
如下图,你现在拥有一本乐谱,你可以通过交换来最终换取钢琴,但是每个物品之间的交换代价是不同的。
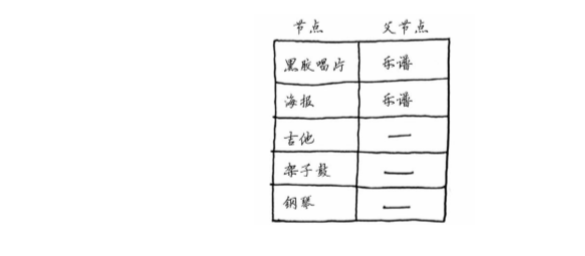
准备工作
创建一个表格,在其中列出每个节点的开销。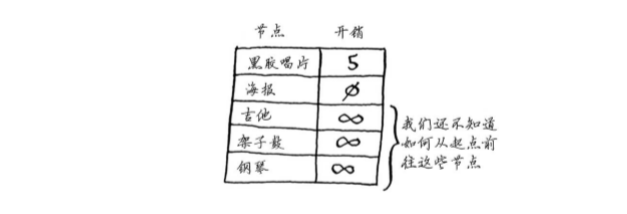
在执行狄克斯特拉算法的过程中,你将不断更新这个表。为计算最终路径,还需在这个表中 添加表示父节点的列。
第一步:找出最便宜的节点。
换海报需要支付的额外费用最少。
- 这是狄克斯特拉算法背后的关键理念:找出图中最便宜的节点,并确保没有到该节点的更便宜的路径!
第二步:计算经过该节点前往其各个邻居的开销。
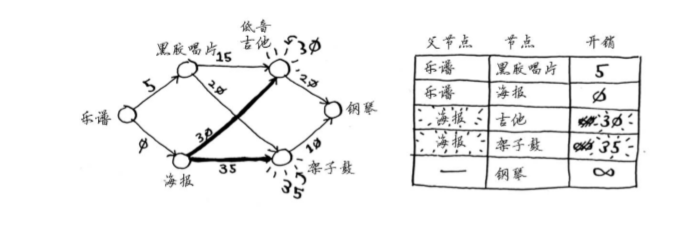
现在的表中包含低音吉他和架子鼓的开销。这些开销是用海报交换它们时需要支付的额外费用,因此父节点为海报。这意味着,要到达低音吉他,需要沿从海报出发的边前行,对架子鼓来说亦如此。 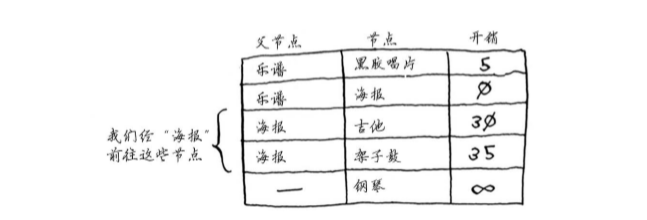
重复
再次执行第一步:下一个最便宜的节点是黑胶唱片——需要额外支付5美元。
再次执行第二步:更新黑胶唱片的各个邻居的开销。
你更新了架子鼓和吉他的开销!这意味着经“黑胶唱片”前往“架子鼓”和“吉他”的开销 更低,因此你将这些乐器的父节点改为黑胶唱片。
再次执行第一步:下一个最便宜的是吉他,因此更新其邻居的开销。 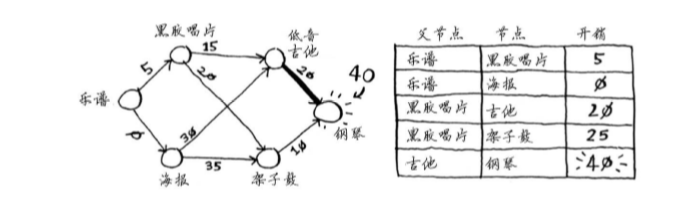
你终于计算出了用吉他换钢琴的开销,于是你将其父节点设置为吉他。最后,对最后一个节 点——架子鼓,做同样的处理。 
如果用架子鼓换钢琴,Rama需要额外支付的费用更少。因此,采用最便宜的交换路径时, Rama需要额外支付35美元。
计算最终路径
现在来兑现前面的承诺,确定最终的路径。当前,我们知道最短路径的开销为35美元,但如 何确定这条路径呢?为此,先找出钢琴的父节点——架子鼓,再找出架子鼓的父节点——黑胶唱片,再出黑胶唱片的父节点——乐谱。

7.4 负权边
先说结论:不能将狄克斯特拉算法用于包含负权边的图。在包含负权边的图中,要找出最短路径,可使用另一种算法——贝尔曼-福德算法(Bellman-Ford algorithm)
- 这是因为狄克斯特拉算法这样假设:该算法认为空权比负权最便宜,所以选择错了最便宜节点,并且认为对于处理过的最便宜节点,没有前往该节点的更短路径。 这种假设仅在没有负权边时才成立
7.5 代码实现
准备工作,建立模型
要编写解决这个问题的代码,需要三个散列表。 随着算法的进行,你将不断更新散列表costs和parents。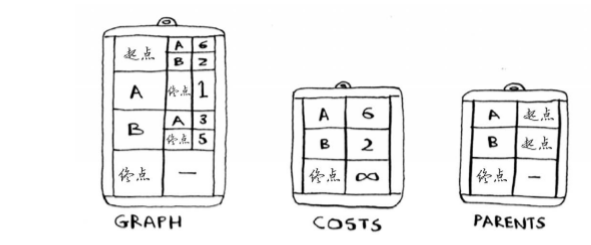
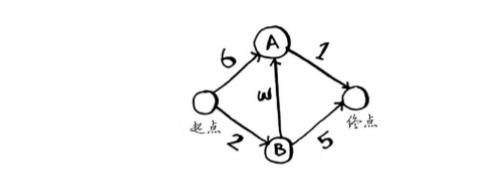
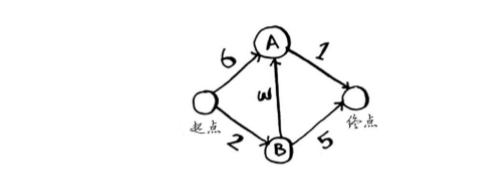
第一个表,graph散列表。
存储节点的所有邻居,建立图模型。为了在图模型中表示这些边的权重,还需要使用另一个散列表。简单说,图模型的散列表是长这样的:
graph = { ‘start’ : { ‘a’ : 6 , ‘b’ : 2 } , ‘a’ : { ‘fin’ : 1 } , ‘b’ : { ‘a’ : 3 , ‘fin’ : 5 } ,’fin’ : { } } 。
# 创建图graph = {}# start节点及其邻居们graph['start'] = {}graph['start']['a'] = 6graph['start']['b'] = 2# a节点及其邻居们graph['a'] = {}graph[a]['fin'] = 1# b节点及其邻居们graph['b'] = {}graph[b]['a'] = 3graph[b]['fin'] = 5# 终点没有任何邻居graph['fin'] = {}
第二个表,cost散列表。
存储从起点到其他节点的开销。未知开销被设为无限大,python的表示:infinity = float(‘inf’)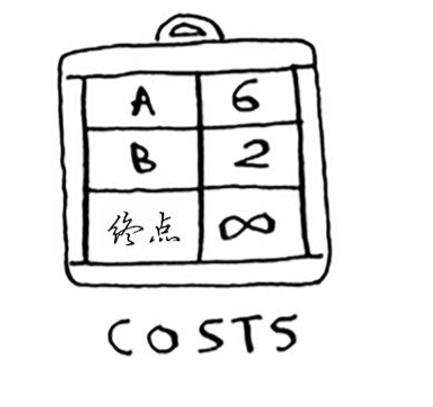
# cost散列表infinity = float('inf')costs = {}costs['a'] = 6cost['b'] = 2cost['fin'] = infinity
第三个表,parents散列表。
用于存储父节点。没有父节点,则设置为None。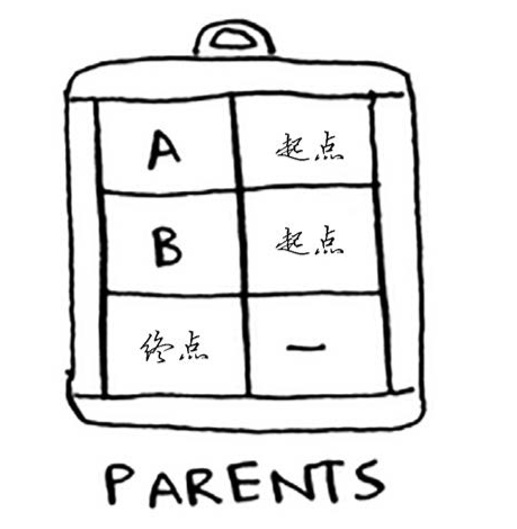
# parents散列表parents = {}parents['a'] = 'start'parents['b'] = 'start'parents['fin'] = None
最后,需要一个数组用于记录
记录处理过的节点,因为在Dijkstra算法中,对于同一个节点,只需要处理一次。
processed = {}
Dijkstra算法实现
完整代码
1.建立图模型
### 创建图graph = {}# start节点及其邻居们graph['start'] = {}graph['start']['a'] = 6graph['start']['b'] = 2# a节点及其邻居们graph['a'] = {}graph['a']['fin'] = 1# b节点及其邻居们graph['b'] = {}graph['b']['a'] = 3graph['b']['fin'] = 5# 终点没有任何邻居graph['fin'] = {}### cost散列表infinity = float('inf')costs = {}costs['a'] = 6costs['b'] = 2costs['fin'] = infinity### parents散列表parents = {}parents['a'] = 'start'parents['b'] = 'start'parents['fin'] = Noneparents['start'] = None
2.算法实现
### 已处理列表processed = []### 首先,找出未处理且开销最低的节点的函数def find_lowest_cost_node(costs):lowest_cost = float('inf')lowest_cost_node = Nonefor node in costs: # 遍历所有节点,找出没有被处理过,且开销最低的节点cost = costs[node]if node not in processed and cost < lowest_cost:lowest_cost = costlowest_cost_node = nodereturn lowest_cost_node### 更新节点邻居node = find_lowest_cost_node(costs)while node is not None: #<=====while循环在所有节点都被处理后结束cost = costs[node]neighbors = graph[node]for n in neighbors.keys(): #<=====遍历当前节点的邻居new_cost = cost + neighbors[n]if new_cost < costs[n]: #<=======如果经过当前节点到其邻居的代价更小,costs[n] = new_cost #<======就更新该邻居的开销parents[n] = node #<======同时将该邻居的节点更新为当前节点processed.append(node) #<=======将当前节点放入已处理列表node = find_lowest_cost_node(costs) #<===找出接下来要处理的节点,并循环
3.测试输出,得到代价路径为 start -> b -> a -> fin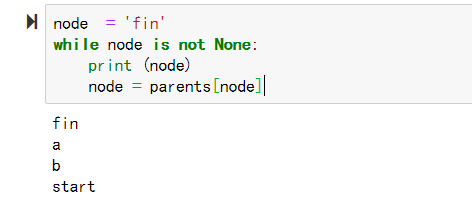

若有收获,就点个赞吧
0 人点赞
