0.教学资源
以下是本节课的微课,配合文档学习效果更佳喔。
 动手1-云台跟踪小球.pptx
动手1-云台跟踪小球.pptx
1.课前导入
今天我们要做一个跟踪小球(或者说是色块)的云台。那么我们通过下面这个视频来看看我们最终要达到的效果。
视频中右侧的就是云台,它会实时跟踪颜色片。跟踪颜色?这个词是不是很耳熟,我们在第一课:机器视觉与颜色识别中就讲到了如何识别并跟踪颜色。赶紧来复习一下吧!
1.1复习Lab模型
Lab模型—锁定颜色
Lab色彩模型,又称亮度 - 对比度模型,被设计来接近人类视觉。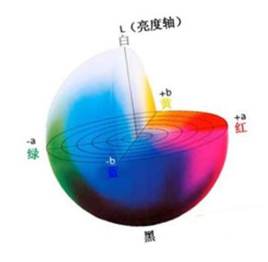
图4.Lab模型示意图
在OpenMVIDE中,点击工具-机器视觉-阈值编辑器,选择帧缓冲区后可以将摄像头拍摄的画面进行颜色捕捉。通过调整Lab阈值,得到想要追踪的颜色区域,如下图演示的追踪红色色块。复制最下方的“Lab阈值”,即可获得“红色”区域的Lab值。
图5.Lab阈值编辑器
将刚才复制的“红色”Lab值粘贴在代码区,创建一个变量“red”,并将值赋予给它。
red=(41,60,44,84,-10,63)
颜色跟踪函数img.find_blobs()
red=(41,60,44,84,-10,63)img.find_blobs([red],pixels_threshold=200,area_threshold=200)
通过img.find_blobs(),找到红色色块。
[red]:刚刚定义的阈值变量。
pixels_threshold=200:如果色块像素数量小于200,会被过滤掉。
area_threshold:如果色块被框起来的面积小于200,会被过滤掉。
2.知识准备
云台和舵机
舵机也叫“伺服电机”,它可以作为机器人的驱动单元,带动机械臂、门等装置,相当于人类的肌肉。本节课,我们使用两个舵机组成云台,使云台能够在上下、左右方向进行摆动。
将舵机的电源线插在OpenMV上,可以用夹子固定起来。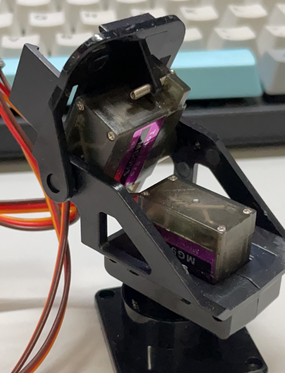
图6.云台
如何用代码驱动舵机呢?我们可以通过Servo.angle控制舵机转动角度。
from pyb import Servo #调用库#将左右舵机插在接口1;上下舵机插在接口2x_servo=Servo(1) #创建舵机对象y_servo=Servo(2)x_servo.angle(90) #将左右舵机旋转到90度位置y_servo.angle(45) #上下舵机旋转到45度位置
LCD屏幕
LCD屏幕也就是我们平时说的液晶屏,安装在OpenMV上的方法特别简单,直接插在侧边的插槽中即可。
控制LCD屏幕的代码也非常简单,只需要初始化并且在while(Ture)中调用lcd.dipsplay(img)就可以了。
import sensor,image,lcdsensor.reset() # 初始化传感器sensor.set_pixformat(sensor.RGB565)sensor.set_framesize(sensor.QQVGA)sensor.skip_frames(10) # 让新设置生效sensor.set_auto_whitebal(False) # 关闭自动白平衡lcd.init() # 初始化lcd屏幕while(True):img = sensor.snapshot()lcd.display(img) #让lcd屏幕显示画面

PID算法
PID算法是运用最广泛的一种自动控制算法,P表示比例(proportional),I表示积分(intergral),D表示积分(derivative)。
PID算法是为了让物理量“保持稳定”而生的。试想这样一个场景,我们希望控制汽车保持在50km/h的速度,当计算机测到某一时间的车速是45km/h,它立刻发出指令,告诉发动机:加速!结果,发动机猛踩油门,嗖的一下,汽车急加速到了60km/h。这时电脑又发出命令:刹车!
结果乘客肯定要吐了…对吧。
所以在大多数时候,我们不能用两个量(比如:加速和刹车)来控制一个物理量,因为这样太不稳定了。而且一些物理量是有惯性的,比如说如果我们将热水器的电源拔掉,它的“余热”可能还会使水温继续升高一会。
PID算法就是来解决这些问题的,它可以将需要控制的物理量带到目标附近,它可以“预见”这个量的变化趋势,它也可以消除因为散热、阻力等因素造成的静态误差。
图8.PID算法
首先我们先来讲P是如何作用的。举刚刚我们热水器的例子:当当前水温和目标水温差很多的时候,我们就让加热器的档位加大进行加热;如果两者差别不大时,就降低档位进行加热。这就是P的作用。但是大家观察上图,当P增加时,仅仅在t=1和t=2之间达到了目标值,其他时候都低于目标值。这是为什么呢?因为日常生活中,机器存在能量损失。
比如说,假如有个人把热水器带到了非常冷的地方,开始烧水了。需要烧到50℃。在P的作用下,水温慢慢升高。直到升高到45℃时,他发现了一个不好的事情:天气太冷,水散热的速度,和P控制的加热的速度相等了。
这可怎么办?P兄这样想:我和目标已经很近了,只需要轻轻加热就可以了。于是,水温永远地停留在45℃,永远到不了50℃。
这时,I变量就起作用了,随着时间的推移,只要没达到目标温度,加热功率就会随时间增加。所以I的作用就是减小静态误差(能量损失这样的误差),让物理量尽可能接近目标值。
但是大家看图片,当I增加的时候,虽然更多时候达到了目标值,但是波动比之前更大了。这时候就需要D变量进行控制。
D变量的职责就是将物理量的“变化速度”趋近于0,它像一个刹车,并且当D变量越大使,刹车力道越大。
from pid import PIDx_pid = PID(p=0.06,d=0.01,i=0.02, imax=100) #设置x(水平)舵机的PID值y_pid = PID(p=0.07,d=0.01,i=0.02, imax=70) #设置y(纵向)舵机的PID值while(True):img = sensor.snapshot()if blobs:x_error = max_blob.cx()-img.width()/2 #目标点的x偏移值=目标点的x坐标-画面宽度的一半y_error = max_blob.cy()-img.height()/2#目标点的y偏移值=目标点的y坐标-画面长度的一半x_output=x_pid.get_pid(x_error,1) #通过error值,得到output值y_output=y_pid.get_pid(y_error,1)x_servo.angle(x_servo.angle()-x_output/2) #将当前角度减去output值y_servo.angle(y_servo.angle()+y_output/2)
(在开始制作之前,需要将pid.py文件放入OpenMV的内存中。)
3.完整代码
import sensor, image,lcdfrom pid import PIDfrom pyb import Servo #调用库x_servo=Servo(1)y_servo=Servo(2)blue_threshold = (26, 41, -32, 3, -40, -7) #蓝色色素块x_pid = PID(p=0.06,d=0.01,i=0.02, imax=100)y_pid = PID(p=0.07,d=0.01,i=0.02, imax=70)sensor.reset()sensor.set_pixformat(sensor.RGB565)sensor.set_framesize(sensor.QQVGA)sensor.skip_frames(10)sensor.set_auto_whitebal(False)lcd.init() # 初始化LCD屏幕def find_max(blobs):max_size=0for blob in blobs:if blob[2]*blob[3] > max_size: #blob[2]是该色块的宽,blob[3]是高max_blob=blobmax_size = blob[2]*blob[3]return max_blob #找到视野中的最大色素块while(True):img = sensor.snapshot()lcd.display(img)blobs = img.find_blobs([blue_threshold])if blobs:max_blob = find_max(blobs)x_error = max_blob.cx()-img.width()/2y_error = max_blob.cy()-img.height()/2print("x_error: ", x_error) #在参数调试窗口打印色块偏离值,便于调试与修正img.draw_rectangle(max_blob.rect()) #在色块外围四周处画框img.draw_cross(max_blob.cx(), max_blob.cy()) #色块中心坐标处画十字lcd.display(img)x_output=x_pid.get_pid(x_error,1)y_output=y_pid.get_pid(y_error,1)print("x_output",x_output) #在参数调试窗口打印坐标值,便于调试与修正x_servo.angle(x_servo.angle()-x_output/2) #输出左右方向上的PWM波控制云台追踪色块标志y_servo.angle(y_servo.angle()+y_output/2) #输出上下方向上的PWM波控制云台追踪色块标志

若有收获,就点个赞吧
0 人点赞
