关于循迹小车
循迹小车是一台可以沿着路线自动行驶的小车,之所以能够循迹,主要是由车头的两对红外反射传感器来识别路线,如果小车脱离了既定线路,可以通过控制小车左转或右转来调节,使其一直沿着既定的路线行驶。
任务
搭建一辆小车,采用 G15 红外反射传感器识别线路,用 micro:bit 编程控制小车沿着路线行驶。
工作原理
- 车架底部左右两侧安装两个G15红外反射传感器,由于轨道是白底黑线的,G15红外反射传感器可以对黑白两种颜色获取不同的数值。Microbit主板读取两个红外传感器的数据,根据数据判断驱动小车的两个轮子旋转方向,从而实现小车转向,达到循线的功能。
模型



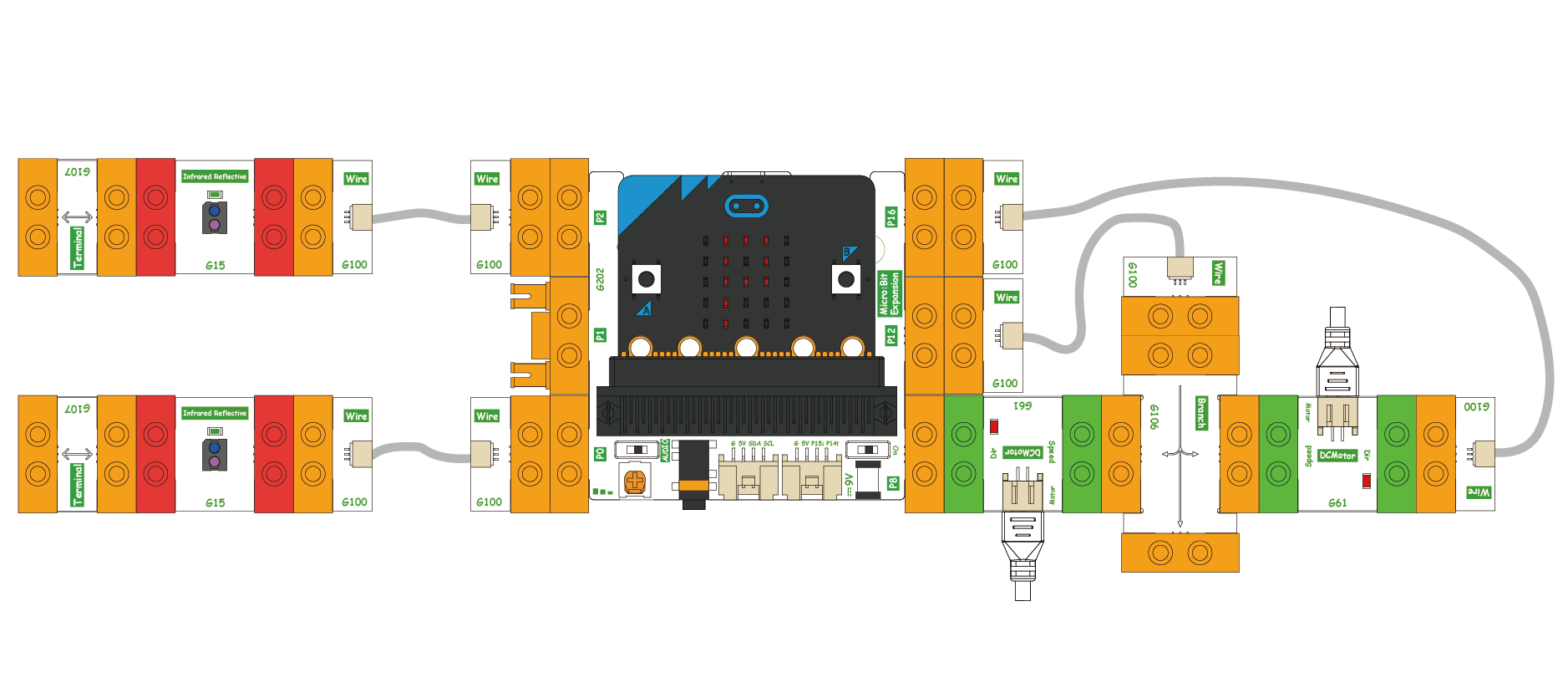
电路拼搭
- Micro:bit 读取 P0 和 P2 口的两个 G15 红外反射传感器数值,判断小车的运行状态。
- Micro:bit 的 P8 口和 P16 口控制俩个电机的旋转方向,可以实现小车转向。
- Micro:bit 的 P12 口可以控制电机的速度。
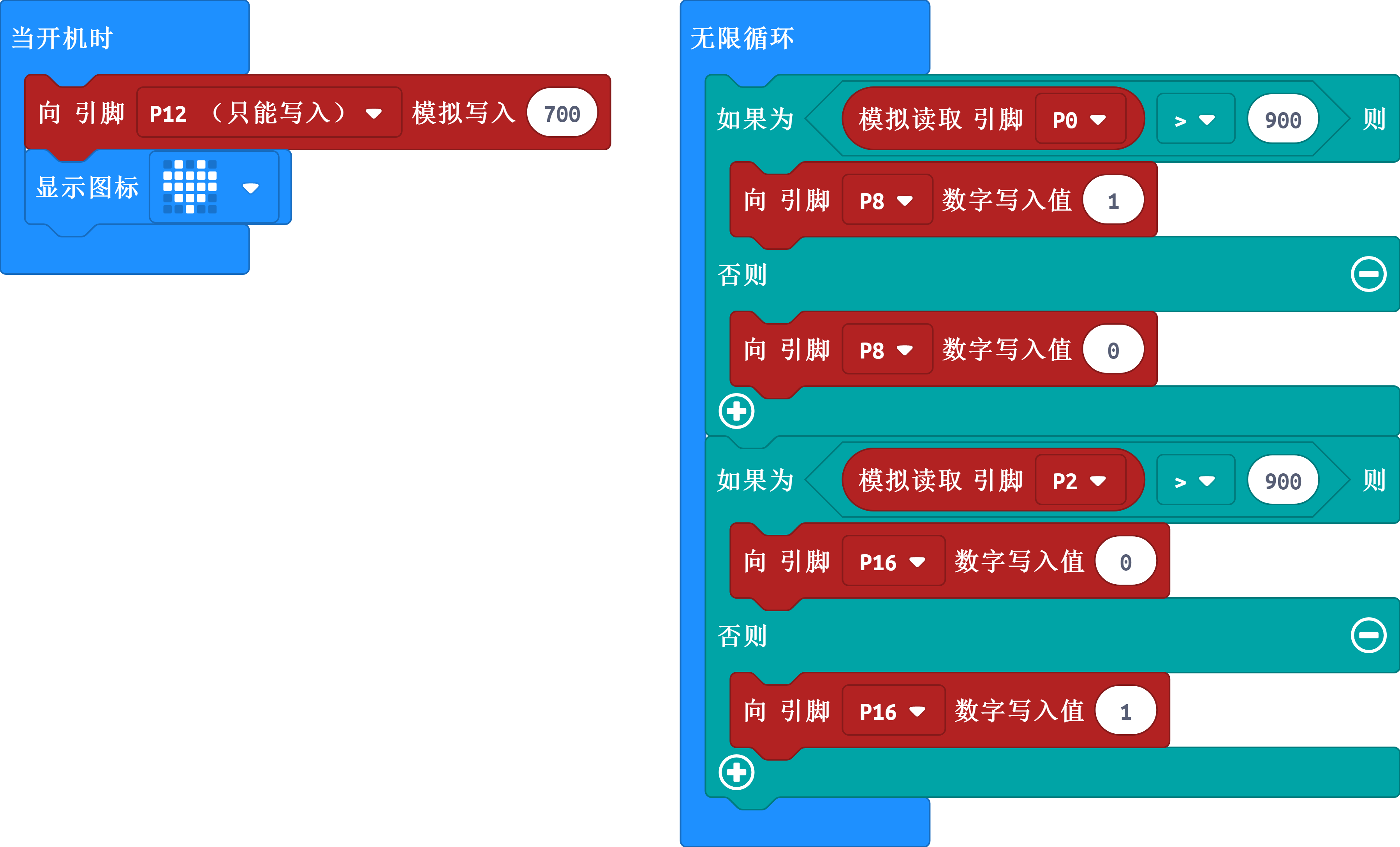
代码
初始化
- 开机写入小车速度值,并显示笑脸;
主循环
- 如果小车向左偏离轨道,会检测到 P0 > 900,P2 < 900,那么 P8 写 “1”P16 写 “1”,小车右转。
- 如果小车向右偏离轨道,会检测到 P0 < 900,P2 > 900,那么 P8 写 “0”P16 写 “0”,小车左转。
视频

若有收获,就点个赞吧
0 人点赞
