新建摄像机,项目窗口 右键摄像机选择CINEMA 4D标签选择摄像机矫正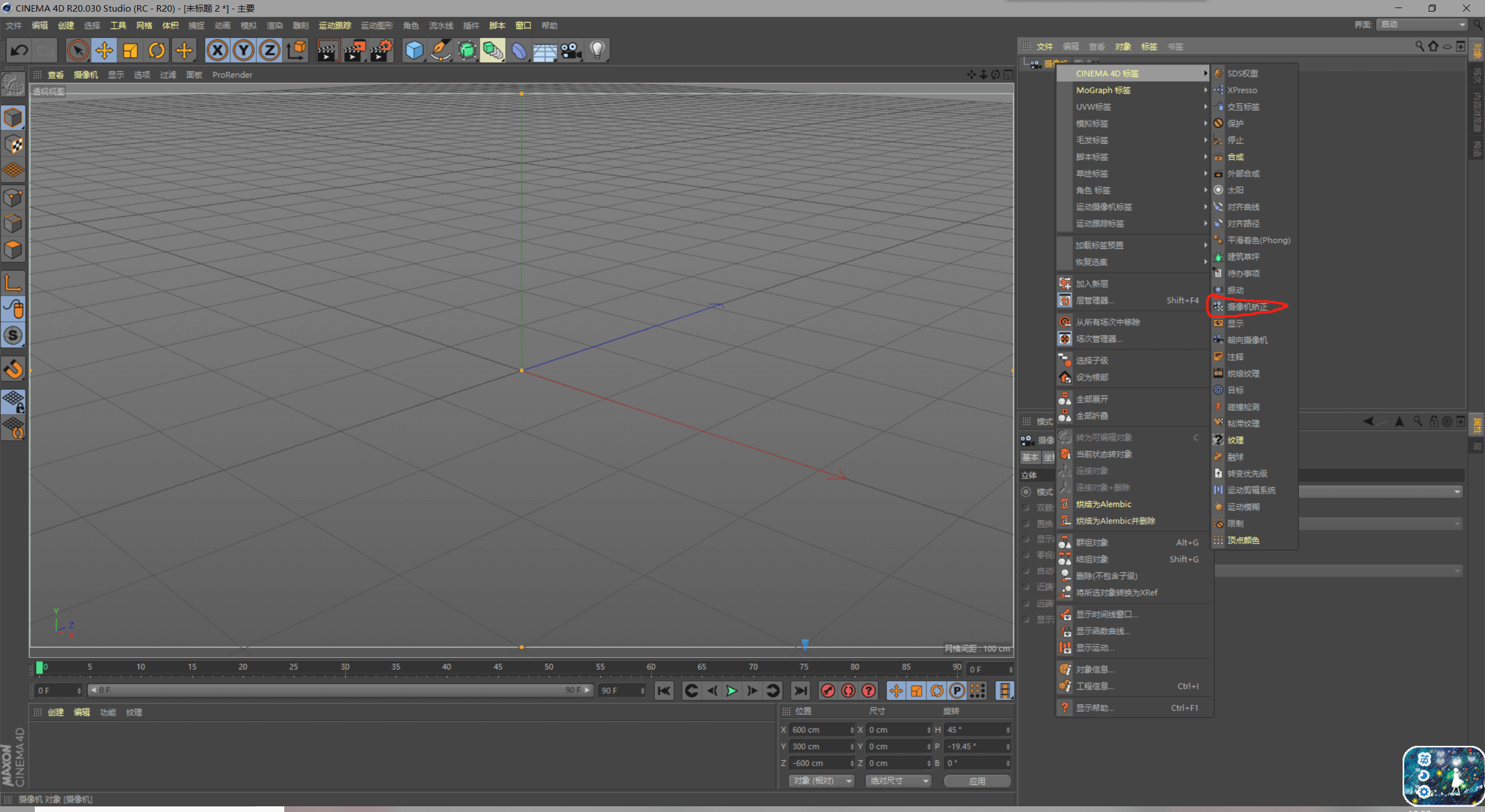
点击摄像机右侧标签进入矫正设置,点击图像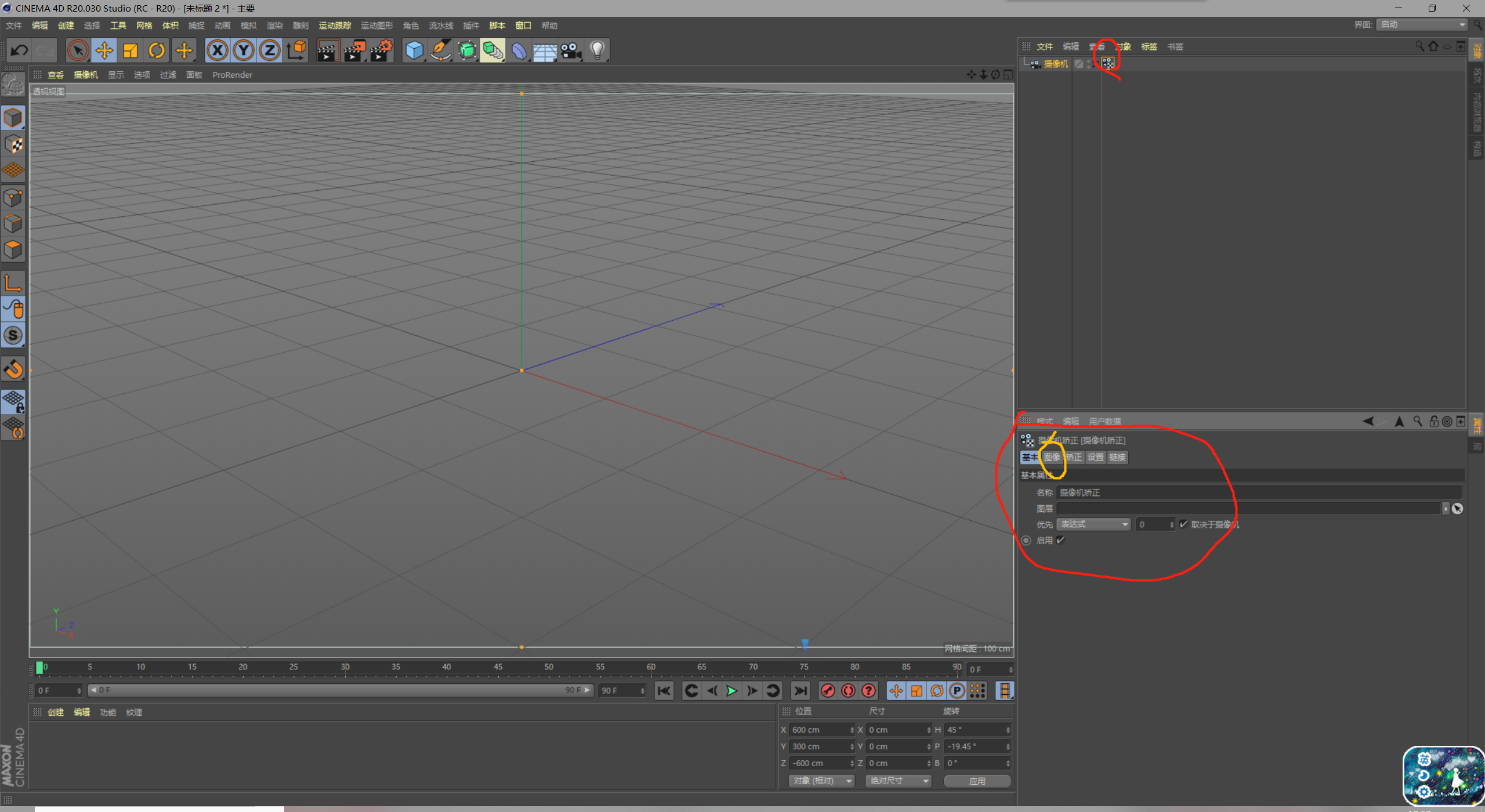
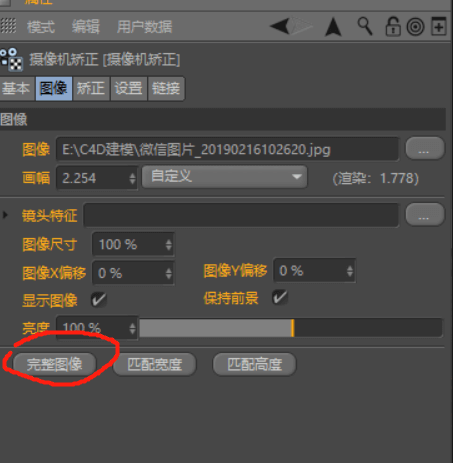
导入背景图片并点击完整图像
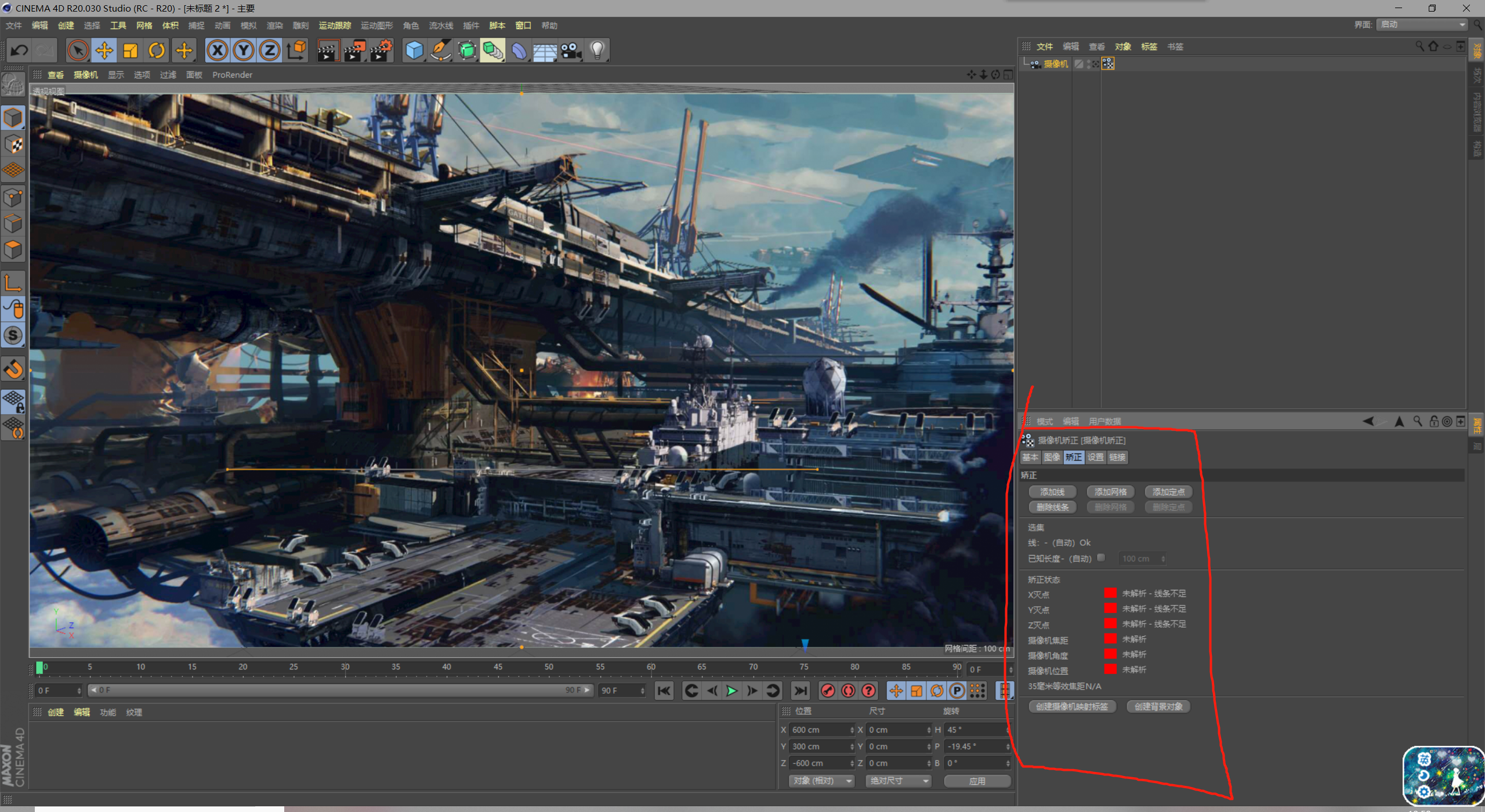
点击图像旁边进入矫正面板并点击添加线
这时视窗会出现一条直线,寻找图中透视线条,移动直线贴合匹配。
按住Ctrl键可复制线条。至少需要用两条线表明一个方向。计算机最少需要知道两个方向的消失点就可以推算出摄像机视角及焦距。也就是最少4条线就能算出摄像机应该在什么地方。线条越多越精准。
线条会虚拟无限延长,所以不用管线条长短。
图中用了四条线来确定位置
这时线条就弄好了,但是矫正面板的XZY灭点还是红色状态,我们需要告诉他哪个线条是哪个轴线。
先按住shift键不放,点击一下线条,就可以看见当前他是什么轴线。
可以从矫正面板选集下边的线(Z(zok)Y(yok)X(xok))来看当前你的线是什么轴线,也可以从线条变化的颜色看。(图中紫色的线为Z轴,红色的线为X轴)
标明后计算机就解析成功了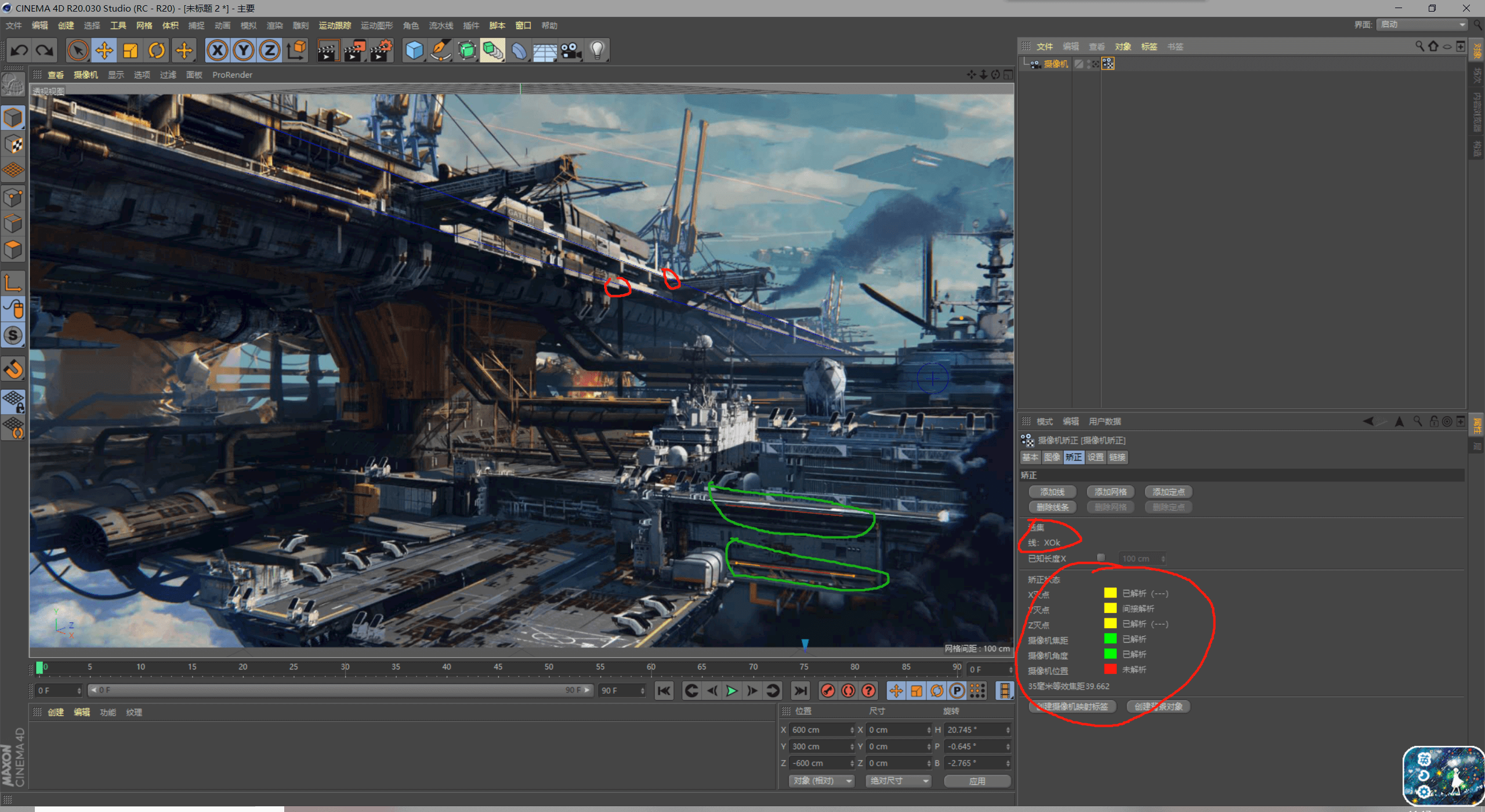
图中摄像机位置还是红的是因为还要添加定点,用来标记一个新的起始位置。这样子放置的模型就会以这个定点为中心点。找一个至少两条线交叉的点当做中心点这样就不会出问题了。这里X与Z轴交叉所以我就选了这里当作定点。这样子的话坐标轴的方向角度就都没有问题了。
就是说添加线等于告诉计算机新的坐标轴是什么方向,新的起始点(0,0,0)在哪里。
起始点就是坐标轴位置(0,0,0)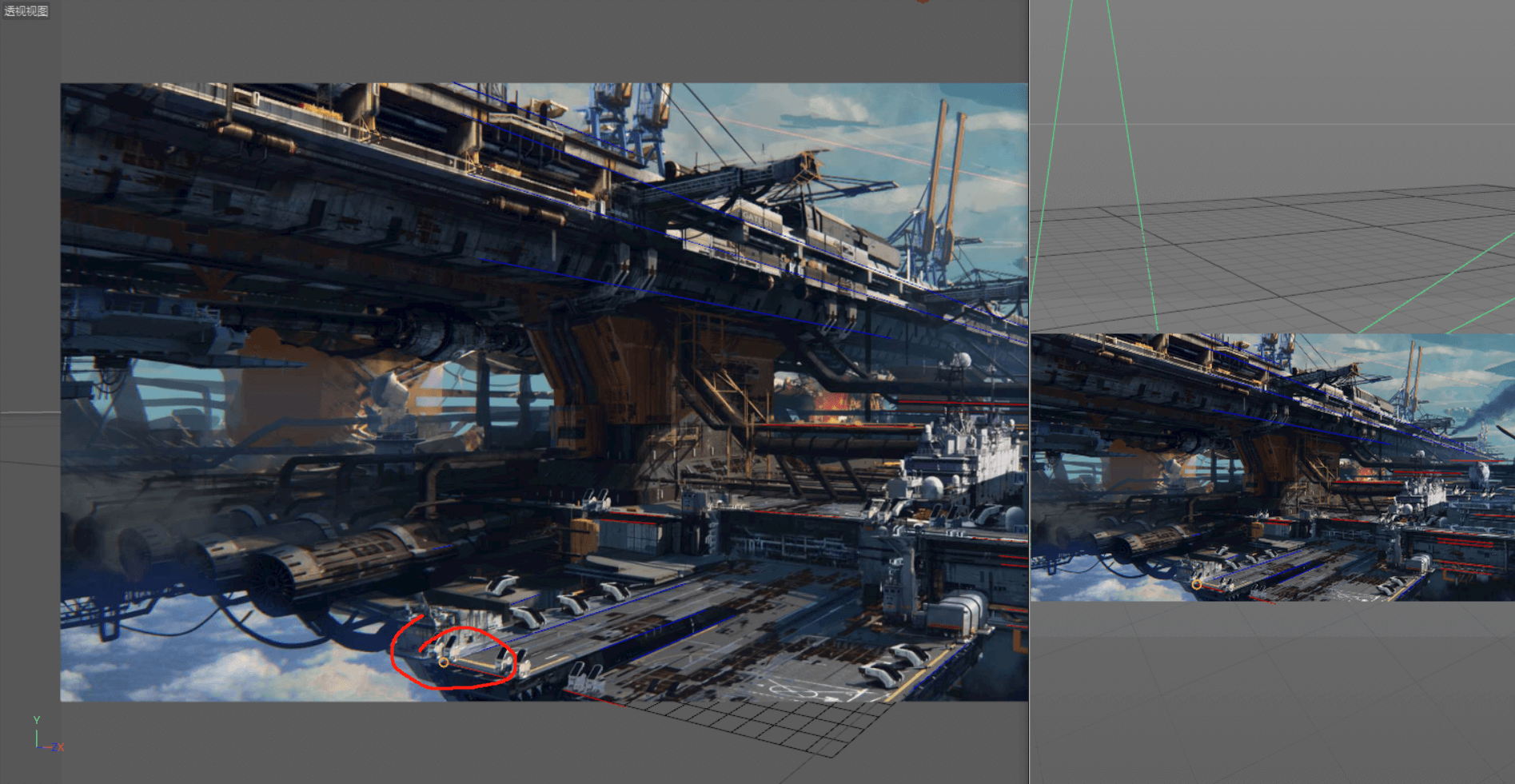
添加完了之后计算机就推算出了摄像机位置了
点击相机启动,点击下面的“创建摄像机映射贴图标签”和“创建背景对象”。不创建这两步,你在摄像机视图将看不到“成果”(我不知道怎么表达,你可以试试不创建会怎么样)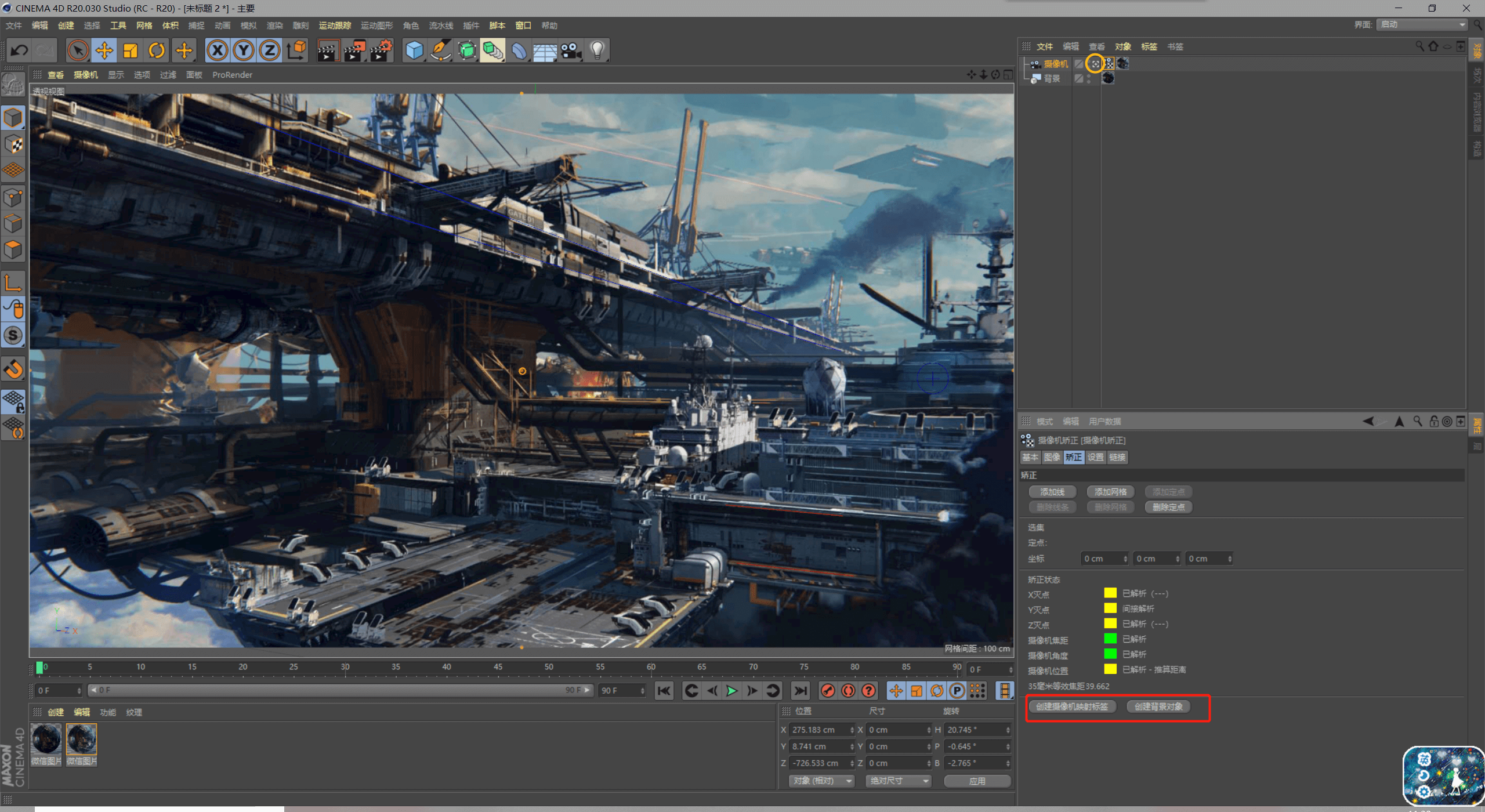
摄像机位置就自动计算出来了,右键摄像机选择CINEMA 4D标签选择保护,这样子摄像机就锁定不会动了。

若有收获,就点个赞吧
0 人点赞
