标题
关于工业机器人的工作机会的讨论,以及关于工业机器人的工作机会的讨论
工业机器人工具工作点的校准方法Procede de calibrage d’un point de fonctionnement d’outils pour robots
工业
描述
[0001] 本发明涉及一种用校准装置校准工业机器人的工具工作点的方法,该校准装置至少有两个光障,这两个光障各自与对方成一角度,顶点角度α大于零,并在一个交叉点交叉,并有以下步骤:
a) 确定刀具的TARGET TCP位置坐标,即相对于刀具基点的TARGET工作点的坐标。
工业机器人和以工作点为参照的TCP坐标系统。
[0002] 这种方法可以在DE 10 230 772 A1中找到。在这里,工具被移动,直到工具到达光障的交汇点。相应的falsädlichen Koordicoten虚假的坐标被检测出来,并被拉到一个correlater。
[0003] 工业机器人具有多个相互连接的手臂,用于移动到工作空间内的任何一点,在相互连接的手臂的最后一个手臂的末端有一个手部法兰,以及连接到手部法兰的工具。该工具可以是,例如,一个夹持器,一个焊接头,或类似的东西。
[0004] 手部凸缘或连接到手部凸缘的工具的工作点的位置和方向可以是在与机器人无关的静止的世界坐标系中或与工业机器人的锚定点相关的静止的基础坐标系中。另一方面,对自由度位置的描述,即轴和手的方向,是在机器人坐标中进行的,据此,从机器人的基轴,即基础坐标系开始,为每个手臂定义一个轴-机器人坐标系,描述每个轴相对于其前一个轴的相对位置。工业机器人的轴-机器人坐标系之间的关系由定义的坐标变换来描述。通过指定手部法兰盘或工具工作点在世界坐标系中的位置和方向,可以通过坐标转换计算出轴-机器人坐标,以便能够控制工业机器人的各个轴。
[0005]工具的工作点的位置,它被连接到工业机器人的手部法兰,由所谓的TCP位置坐标描述。工业机器人是根据手部法兰盘和指定的TCP位置坐标进行编程的。TCP位置坐标随每把刀具提供,被称为刀具中心点(TCP)。TCP的位置坐标和机器人轴的坐标一样,都是一个有六个维度的向量。前三个坐标定义了工作点相对于工业机器人的工具基点的位置,即工具与手部法兰盘的连接点。其他三个坐标定义了工作点的轴线相对于工具基点的方向。
[0006] 工具的工作点可以是,例如,焊头的尖端。只有在准确知道TCP位置坐标的情况下,刀具的工作点才能被精确移动。
[0007] 然而,在操作过程中,由于工具的磨损、弯曲等原因,工具的工作点会发生变化,从而导致工具的工作点定位不正确。
[0008] 因此,有必要以高精度测量工具的工作点。
[0009] EP 0 417 320 A1描述了一种用于测量工业机器人的工具的工作点(TCP)的方法,其中调整点被固定在机器人手臂的手法兰上,调整点相对于手法兰的位置是已知的。此外,在工业机器人的工作空间中设置了一个参考点。为了测量工作点,将工具的尖端放在参考尖端上,工具尖端的位置和方向在基础坐标系中被确定。然后将手部法兰盘的设置点放在参考尖端上,并在手部法兰盘的坐标系中确定设置点的位置和方向。此外,参考尖头在参考坐标系中的位置和方向被确定,并从三个矩阵中计算出一个变换矩阵,以指定刀具工作点的TCP位置坐标。
[0010] 校准需要一个多步骤的遍历过程和坐标转换。
[0011] 美国专利6,352,354 B1描述了一种用于在工业机器人工具的工作点产生光点信号的光点元件。这可以用来描述工具在学习阶段的确切位置。
[0012] 美国专利5,929,584描述了一种用具有垂直和水平表面的校准块测量工具的工作点的方法。通过将刀具从起始位置移动到刀具与其中一个表面的接触点,然后将刀具返回到起始点,对另一个表面重复这一过程,就可以计算出工作点的TCP位置坐标。为此,需要进行复杂的坐标转换,从参考坐标系统通过单个机器人坐标到手部法兰,以便从参考坐标确定TCP坐标系统中的TCP位置坐标。
[0013] DE 37 24 656 T2描述了一种多维测量机,它有分叉的光障,在交叉点相遇。由于多个光障都位于同一平面内,工件的无接触探测可以从不同方向进行,但在同一探测平面内。
[0014] 美国专利5,177,563公开了一种用于校准机器人手臂的分叉光障,其中工具尖端被移动,直到它位于光障的交叉点上,并且两个光障同时被触发。在这个交叉点的TCP位置坐标与TARGET TCP坐标进行比较,并从中确定偏差。然而,寻找交点是一个漫长的过程。
[0022]只要在同一坐标系中描述当光障被中断时确定的TCP位置坐标,根据工具的弯曲情况,例如,当第一光障被中断时将确定TCP位置坐标的y坐标的偏差,当第二光障被中断时将确定TCP位置坐标的z坐标的偏差,如果需要,将对TCP位置坐标进行相应的校正。
[0023] 下面将参照附图更详细地解释本发明。它们表明。
图1 根据本发明的校准装置的透视图,有两个相交的光障。
图2 根据图1的测量装置的俯视图。
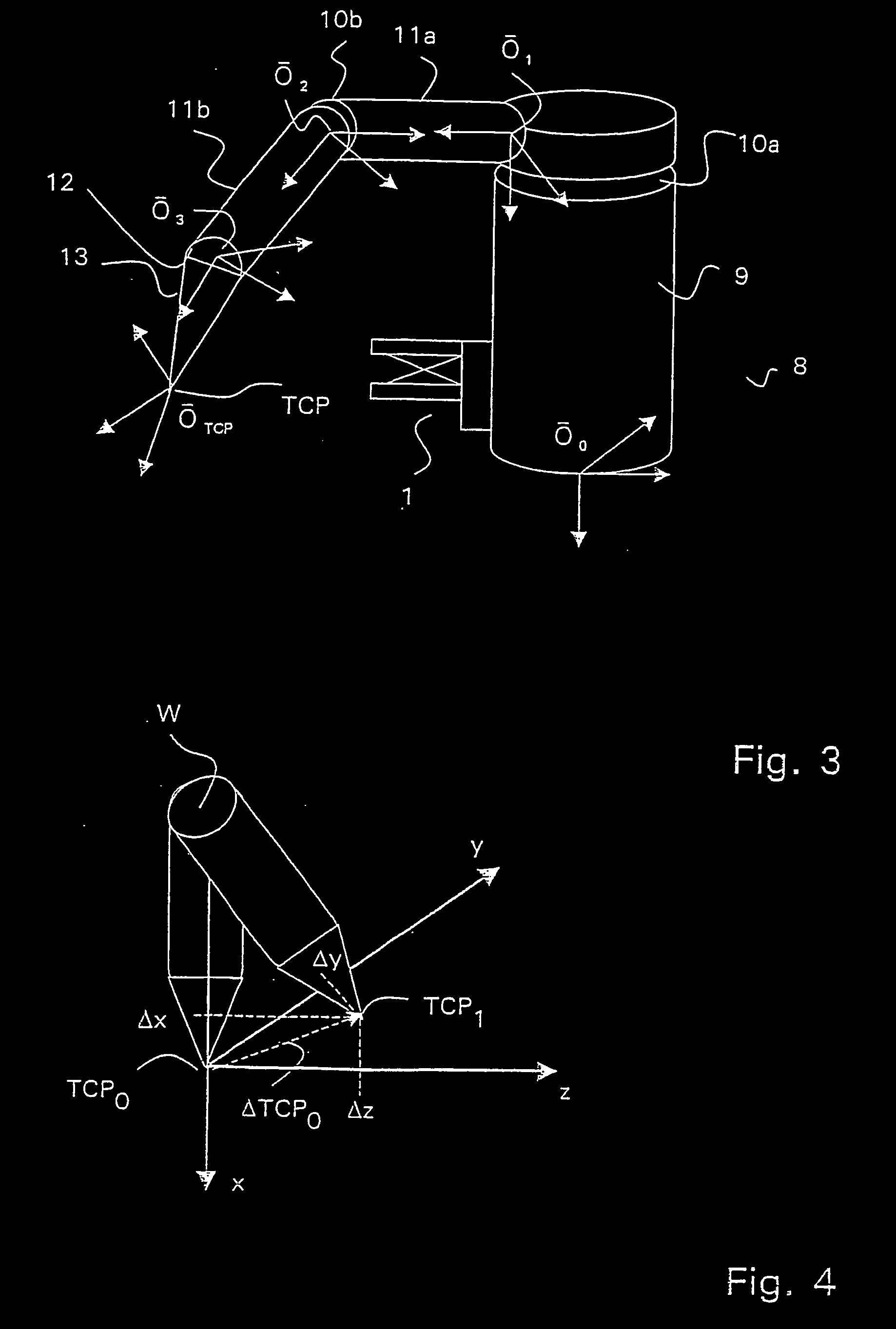
图3 带有几个手臂的工业机器人的草图和基础坐标系以及轴坐标系。
图4 刀具磨损后的工作点与TCP坐标系的位移简图。
[0024] 图1显示了根据本发明的测量装置1的透视图。测量装置1有一个一侧开口的框架2,其上有两个间隔开的平行腿3a、3b。因此,测量装置1是U形的。支腿3a、3b与一个固定板4整体连接,有了这个固定板,测量装置1就能以固定的方式安装在工业机器人的工作空间。
[0025] 在腿部3a、3b中,有对角线的
5a、5b设置在腿部3a、3b中,它们斜向排列,彼此以90°的顶角α运行,并在腿部3a、3b之间的中间空间的交叉点R相遇。为此,每个光屏障5a、5b的一个发射器6和一个接收器7分别连接到第一光屏障5a的第一条腿3a的前端和另一条腿3b的后端,以及第二光屏障5b的第一条腿3a的后端和第二条腿3b的前端。这样,就形成了一个分叉的光屏障,它最好被设计成红外光屏障。
[0026] 图2是校准装置1的俯视图。很明显,光障5a、5b在腿3a和3b之间斜向运行,并在腿3a、3b之间的空间中的交叉点R处相遇。
[0027]用于工业机器人的工具的工作点TCP,例如刀尖,被移动以校准工作点TCP的方式,以接近TARGET工作点TCPSOLL,该工作点优选位于校准装置1的交点R处。在这种情况下,两个光屏障5a、5b都被刀尖打断,从而产生一个开关信号。
[0028] 下面将更详细地解释校准程序。
[0029] 图3显示了一个工业机器人8的草图。工业机器人8有一个基础坐标系O0或世界坐标系,该坐标系相对于工业机器人8的底座是静止的。在底座9上有一连串的臂11,通过关节10相互连接。 对于这些臂11中的每一个,定义了一个轴坐标系O1、O2、O3,描述了相应的臂11的各自末端相对于相关关节10的位置和方向,臂11与前一个臂11连接。
[0030] 在臂链11的末端有一个手掌12,工具13被连接在上面。
[0031] 为工具13定义了一个TCP坐标系OTCP,它的原点在工具的工作点TCP。基于该TCP坐标系OTCP为工具13提供TCP位置坐标,该坐标系定义了工作点TCP相对于手部法兰12上的工具基点W的位置和方向,即相对于工具13与工业机器人8的连接点。
[0032]为了能够在操作中相对于工业机器人8的工具基点W快速地测量TCP位置坐标,在TCP坐标系OTCP的基础上,将工具13的刀尖移动到固定安装的测量设备1的TARGET工作点TCPSOLL。因此,当工具13被工业机器人8引导时,与工作点TCP相关的横移路径发生插值。 TCP坐标系OTCP的原点在此相对于工作点TCP的定义TCP位置坐标保持静止。
[0033]当第一光障被中断时,TCP位置坐标被保持,并且确定轴y的ACTUAL工作点TCPIST与SOLA工作点TCPSOLL的偏差。同样地,当第二道光屏障被中断时,确定第二轴z的实际工作点TCPIST与设定工作点TCPSOLL的偏差。第一轴y和第二轴z的这些偏差对应于工作点TCP在三维空间的位移,考虑到两个光障跨越了一个共同的平面,该平面在零点时为第三轴x所穿越。中断的顺序是由工具的弯曲或通道控制造成的。
[0034] 实际的工具中心点由光障中断和重新释放之间的中心点决定。刀具的直径也可以通过中断的时间来确定。
[0035] 因此,从偏差来看,在工具13磨损或弯曲的情况下,工作点TCP的位移可以直接在TCP坐标中确定,而不需要对交点R进行精心搜索。也不需要进行复杂的坐标转换。[0036] 图4显示了工具13的TCP坐标系OTCP,它的原点在工具13的工作点TCP。对于工具的轮廓曲率的情况,工作点TCP1相对于先前确定的原始工作点TCP0移动。TCP的位置坐标要通过这个移位来校正 ΔTCP0=TCP1-TCP0。 因为根据本发明,工业机器人8是相对于TCP坐标系OTCP进行控制的,最初定义的TCP位置坐标TCP0和磨损工具13的新工作点TCP1的位置之间的差异是由Y轴的第一光障被中断时的差异Δy和Z轴的第二光障被中断时的差异Δz确定的。由于光障所跨越的平面在x处为零,可以计算出与名义工作点的x值的偏差Δx。
[0037] 刀具长度在X方向的偏差可以通过第二轮测量来确定,其中刀具在X轴上被移动。
通过在X轴方向移动工具,从上面或下面进入相交的光障。
[0038] 如果光障不与x轴、y轴和z轴重合,可以通过坐标转换从已知的光障方向和顶角α计算出x轴、y轴和z轴方向的偏差。
Patentansprüche 声称
用测量装置(1)测量工业机器人(8)的工具(13)的工作点(TCP)的方法,该测量装置至少有两个光障,这两个光障彼此成一角度,顶点角度(α)大于零,并在一个交叉点(R)相交。
a) 确定工具(13)相对于工业机器人(8)的工具基点(W)的TARGET TCP位置坐标和相对于工作点(TCP)的40 TCP坐标系。
特点是
b) 相对于TCP坐标系,通过光障将工具(13)直接移动到TARGET工作点,使工具(13)对应于工作点(TCP)的刀尖中断光障。
c) 记录各光屏障中断时的实际TCP位置坐标。
d) 确定在目标工作点中断光障的TARGET TCP位置坐标(TCPSOLL)与相应记录的ACTUAL工作点的ACTUAL TCP位置坐标(TCPIST)之间的差异。
e) 计算实际工作点(TCPIST)与期望工作点(TCPSOLL)的偏差,对于光屏障规定的平面数量,从差异和已知的光屏障的位置和顶点角度(α)计算。
2.根据权利要求1所述的方法,其特征在于,通过计算出的实际工作点(TCPIST)与从TCP位置坐标系统的平面的TARGET工作点(TCPSOLL)之间的偏差,修正TCP位置坐标,确定的实际TCP位置坐标。
3.根据前述权利要求之一的方法,其特征在于,目标工作点(TCPSOLL)是用TCP位置坐标确定的,在该位置上,与工作点(TCP)相对应的刀尖同时中断了共同交点(R)中的所有光障。
4.根据前述权利要求之一的方法,其中提供两个光障,它们以90°的顶点角度α相互交叉,并跨越坐标系的第一平面,并且其中第一光障对应于坐标系的第一轴(y),第二光障对应于第二轴(z)。
坐标系的第二轴(z),其特征在于,第一轴(y)的操作点(TCP)的偏差是由实际操作点(TCPIST)与目标操作点(TCPSOLL)的偏差确定的,该偏差是在第一光障被中断时确定的,第二轴(z)的操作点(TCP)的偏差是由实际操作点(TCPIST)与目标操作点(TCPSOLL)的偏差确定的,该偏差是在第二光障被中断时确定的。
5.根据前述任何一项权利要求的方法,其特征在于将ISTTCP位置坐标确定为光屏障中断时间和随后释放光屏障之间的平均IST-TCP位置坐标。
6.根据权利要求5所述的方法,其特征在于从中断光障时和随后释放光障时确定的IST-TCP位置坐标之差确定工具直径。

若有收获,就点个赞吧
0 人点赞
