一、双目测距原理推导
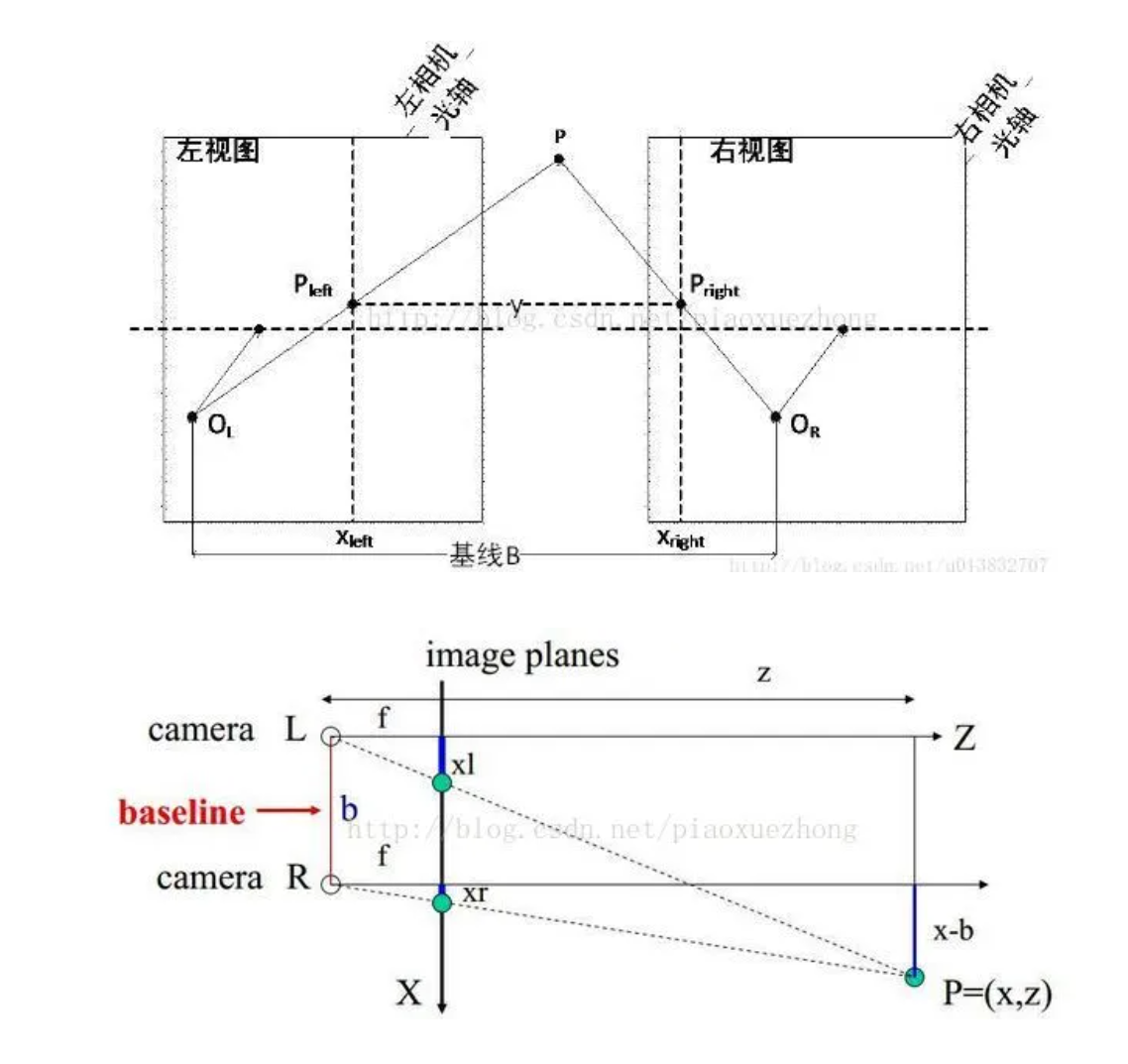
使用三角形相似可以解算出x, y, z

二、realsense获取三维坐标
realsense有封装好的函数可以获取三维坐标:rs.rs2_deproject_pixel_to_point()
# -*- coding: utf-8 -*-import pyrealsense2 as rsimport numpy as npimport cv2import jsonpipeline = rs.pipeline() #定义流程pipelineconfig = rs.config() #定义配置configconfig.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30) #配置depth流config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30) #配置color流profile = pipeline.start(config) #流程开始align_to = rs.stream.color #与color流对齐align = rs.align(align_to)def get_aligned_images():frames = pipeline.wait_for_frames() #等待获取图像帧aligned_frames = align.process(frames) #获取对齐帧aligned_depth_frame = aligned_frames.get_depth_frame() #获取对齐帧中的depth帧color_frame = aligned_frames.get_color_frame() #获取对齐帧中的color帧############### 相机参数的获取 #######################intr = color_frame.profile.as_video_stream_profile().intrinsics #获取相机内参depth_intrin = aligned_depth_frame.profile.as_video_stream_profile().intrinsics #获取深度参数(像素坐标系转相机坐标系会用到)camera_parameters = {'fx': intr.fx, 'fy': intr.fy,'ppx': intr.ppx, 'ppy': intr.ppy,'height': intr.height, 'width': intr.width,'depth_scale': profile.get_device().first_depth_sensor().get_depth_scale()}# 保存内参到本地with open('./intr7insics.json', 'w') as fp:json.dump(camera_parameters, fp)#######################################################depth_image = np.asanyarray(aligned_depth_frame.get_data()) #深度图(默认16位)depth_image_8bit = cv2.convertScaleAbs(depth_image, alpha=0.03) #深度图(8位)depth_image_3d = np.dstack((depth_image_8bit,depth_image_8bit,depth_image_8bit)) #3通道深度图color_image = np.asanyarray(color_frame.get_data()) # RGB图#返回相机内参、深度参数、彩色图、深度图、齐帧中的depth帧return intr, depth_intrin, color_image, depth_image, aligned_depth_frameif __name__ == "__main__":while 1:intr, depth_intrin, rgb, depth, aligned_depth_frame = get_aligned_images() #获取对齐的图像与相机内参# 定义需要得到真实三维信息的像素点(x, y),本例程以中心点为例print("============")print(aligned_depth_frame)x = 320y = 240dis = aligned_depth_frame.get_distance(x, y) #(x, y)点的真实深度值print("dis: ", dis)camera_coordinate = rs.rs2_deproject_pixel_to_point(depth_intrin, [x, y], dis) #(x, y)点在相机坐标系下的真实值,为一个三维向量。其中camera_coordinate[2]仍为dis,camera_coordinate[0]和camera_coordinate[1]为相机坐标系下的xy真实距离。print(camera_coordinate)cv2.imshow('RGB image',rgb) #显示彩色图像key = cv2.waitKey(1)# Press esc or 'q' to close the image windowif key & 0xFF == ord('q') or key == 27:pipeline.stop()breakcv2.destroyAllWindows()

若有收获,就点个赞吧
0 人点赞
