关于A的介绍,可以移步到这里。
本文参考[Amit`s A Pages](http://theory.stanford.edu/~amitp/GameProgramming/Heuristics.html)。
在 A 的介绍中,我们提到A是通过计算节点的代价成本来寻找当前的最佳路径。而A优于其他搜索算法的原因就是A的启发函数。
启发函数 计算的是从当前节点到目标节点的一个预估成本。其实也就是从当前位置到目标位置的移动距离,预估的距离越准确,A搜索的路径就越优,因此启发函数
计算的是从当前节点到目标节点的一个预估成本。其实也就是从当前位置到目标位置的移动距离,预估的距离越准确,A搜索的路径就越优,因此启发函数 的结果对A路径规划的结果也起了重要的影响。
的结果对A路径规划的结果也起了重要的影响。
| 启发函数计算值 | 函数 | 搜索结果 |
|---|---|---|
 %3C%2Ftitle%3E%0A%3Cdefs%20aria-hidden%3D%22true%22%3E%0A%3Cpath%20stroke-width%3D%221%22%20id%3D%22E1-MJMATHI-68%22%20d%3D%22M137%20683Q138%20683%20209%20688T282%20694Q294%20694%20294%20685Q294%20674%20258%20534Q220%20386%20220%20383Q220%20381%20227%20388Q288%20442%20357%20442Q411%20442%20444%20415T478%20336Q478%20285%20440%20178T402%2050Q403%2036%20407%2031T422%2026Q450%2026%20474%2056T513%20138Q516%20149%20519%20151T535%20153Q555%20153%20555%20145Q555%20144%20551%20130Q535%2071%20500%2033Q466%20-10%20419%20-10H414Q367%20-10%20346%2017T325%2074Q325%2090%20361%20192T398%20345Q398%20404%20354%20404H349Q266%20404%20205%20306L198%20293L164%20158Q132%2028%20127%2016Q114%20-11%2083%20-11Q69%20-11%2059%20-2T48%2016Q48%2030%20121%20320L195%20616Q195%20629%20188%20632T149%20637H128Q122%20643%20122%20645T124%20664Q129%20683%20137%20683Z%22%3E%3C%2Fpath%3E%0A%3Cpath%20stroke-width%3D%221%22%20id%3D%22E1-MJMAIN-28%22%20d%3D%22M94%20250Q94%20319%20104%20381T127%20488T164%20576T202%20643T244%20695T277%20729T302%20750H315H319Q333%20750%20333%20741Q333%20738%20316%20720T275%20667T226%20581T184%20443T167%20250T184%2058T225%20-81T274%20-167T316%20-220T333%20-241Q333%20-250%20318%20-250H315H302L274%20-226Q180%20-141%20137%20-14T94%20250Z%22%3E%3C%2Fpath%3E%0A%3Cpath%20stroke-width%3D%221%22%20id%3D%22E1-MJMATHI-6E%22%20d%3D%22M21%20287Q22%20293%2024%20303T36%20341T56%20388T89%20425T135%20442Q171%20442%20195%20424T225%20390T231%20369Q231%20367%20232%20367L243%20378Q304%20442%20382%20442Q436%20442%20469%20415T503%20336T465%20179T427%2052Q427%2026%20444%2026Q450%2026%20453%2027Q482%2032%20505%2065T540%20145Q542%20153%20560%20153Q580%20153%20580%20145Q580%20144%20576%20130Q568%20101%20554%2073T508%2017T439%20-10Q392%20-10%20371%2017T350%2073Q350%2092%20386%20193T423%20345Q423%20404%20379%20404H374Q288%20404%20229%20303L222%20291L189%20157Q156%2026%20151%2016Q138%20-11%20108%20-11Q95%20-11%2087%20-5T76%207T74%2017Q74%2030%20112%20180T152%20343Q153%20348%20153%20366Q153%20405%20129%20405Q91%20405%2066%20305Q60%20285%2060%20284Q58%20278%2041%20278H27Q21%20284%2021%20287Z%22%3E%3C%2Fpath%3E%0A%3Cpath%20stroke-width%3D%221%22%20id%3D%22E1-MJMAIN-29%22%20d%3D%22M60%20749L64%20750Q69%20750%2074%20750H86L114%20726Q208%20641%20251%20514T294%20250Q294%20182%20284%20119T261%2012T224%20-76T186%20-143T145%20-194T113%20-227T90%20-246Q87%20-249%2086%20-250H74Q66%20-250%2063%20-250T58%20-247T55%20-238Q56%20-237%2066%20-225Q221%20-64%20221%20250T66%20725Q56%20737%2055%20738Q55%20746%2060%20749Z%22%3E%3C%2Fpath%3E%0A%3C%2Fdefs%3E%0A%3Cg%20stroke%3D%22currentColor%22%20fill%3D%22currentColor%22%20stroke-width%3D%220%22%20transform%3D%22matrix(1%200%200%20-1%200%200)%22%20aria-hidden%3D%22true%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-68%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-28%22%20x%3D%22576%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-6E%22%20x%3D%22966%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-29%22%20x%3D%221566%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E#card=math&code=h%28n%29&id=RD2EY) = 0 %3C%2Ftitle%3E%0A%3Cdefs%20aria-hidden%3D%22true%22%3E%0A%3Cpath%20stroke-width%3D%221%22%20id%3D%22E1-MJMATHI-68%22%20d%3D%22M137%20683Q138%20683%20209%20688T282%20694Q294%20694%20294%20685Q294%20674%20258%20534Q220%20386%20220%20383Q220%20381%20227%20388Q288%20442%20357%20442Q411%20442%20444%20415T478%20336Q478%20285%20440%20178T402%2050Q403%2036%20407%2031T422%2026Q450%2026%20474%2056T513%20138Q516%20149%20519%20151T535%20153Q555%20153%20555%20145Q555%20144%20551%20130Q535%2071%20500%2033Q466%20-10%20419%20-10H414Q367%20-10%20346%2017T325%2074Q325%2090%20361%20192T398%20345Q398%20404%20354%20404H349Q266%20404%20205%20306L198%20293L164%20158Q132%2028%20127%2016Q114%20-11%2083%20-11Q69%20-11%2059%20-2T48%2016Q48%2030%20121%20320L195%20616Q195%20629%20188%20632T149%20637H128Q122%20643%20122%20645T124%20664Q129%20683%20137%20683Z%22%3E%3C%2Fpath%3E%0A%3Cpath%20stroke-width%3D%221%22%20id%3D%22E1-MJMAIN-28%22%20d%3D%22M94%20250Q94%20319%20104%20381T127%20488T164%20576T202%20643T244%20695T277%20729T302%20750H315H319Q333%20750%20333%20741Q333%20738%20316%20720T275%20667T226%20581T184%20443T167%20250T184%2058T225%20-81T274%20-167T316%20-220T333%20-241Q333%20-250%20318%20-250H315H302L274%20-226Q180%20-141%20137%20-14T94%20250Z%22%3E%3C%2Fpath%3E%0A%3Cpath%20stroke-width%3D%221%22%20id%3D%22E1-MJMATHI-6E%22%20d%3D%22M21%20287Q22%20293%2024%20303T36%20341T56%20388T89%20425T135%20442Q171%20442%20195%20424T225%20390T231%20369Q231%20367%20232%20367L243%20378Q304%20442%20382%20442Q436%20442%20469%20415T503%20336T465%20179T427%2052Q427%2026%20444%2026Q450%2026%20453%2027Q482%2032%20505%2065T540%20145Q542%20153%20560%20153Q580%20153%20580%20145Q580%20144%20576%20130Q568%20101%20554%2073T508%2017T439%20-10Q392%20-10%20371%2017T350%2073Q350%2092%20386%20193T423%20345Q423%20404%20379%20404H374Q288%20404%20229%20303L222%20291L189%20157Q156%2026%20151%2016Q138%20-11%20108%20-11Q95%20-11%2087%20-5T76%207T74%2017Q74%2030%20112%20180T152%20343Q153%20348%20153%20366Q153%20405%20129%20405Q91%20405%2066%20305Q60%20285%2060%20284Q58%20278%2041%20278H27Q21%20284%2021%20287Z%22%3E%3C%2Fpath%3E%0A%3Cpath%20stroke-width%3D%221%22%20id%3D%22E1-MJMAIN-29%22%20d%3D%22M60%20749L64%20750Q69%20750%2074%20750H86L114%20726Q208%20641%20251%20514T294%20250Q294%20182%20284%20119T261%2012T224%20-76T186%20-143T145%20-194T113%20-227T90%20-246Q87%20-249%2086%20-250H74Q66%20-250%2063%20-250T58%20-247T55%20-238Q56%20-237%2066%20-225Q221%20-64%20221%20250T66%20725Q56%20737%2055%20738Q55%20746%2060%20749Z%22%3E%3C%2Fpath%3E%0A%3C%2Fdefs%3E%0A%3Cg%20stroke%3D%22currentColor%22%20fill%3D%22currentColor%22%20stroke-width%3D%220%22%20transform%3D%22matrix(1%200%200%20-1%200%200)%22%20aria-hidden%3D%22true%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-68%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-28%22%20x%3D%22576%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-6E%22%20x%3D%22966%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-29%22%20x%3D%221566%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E#card=math&code=h%28n%29&id=RD2EY) = 0 |
A*算法退化成Dijkstra | 仅能保证可以找到一条最优路径 |
 <= 实际代价 <= 实际代价 |
 越小,A*扩展的节点越多,运行的速度越慢 越小,A*扩展的节点越多,运行的速度越慢 |
保证能找到一条最优路径 |
 = 实际代价 = 实际代价 |
最优状态,仅寻找最佳路径,不扩展别的任何节点 | 保证能找到一条最优路径,而且运算速度很快 |
 >= 实际代价 >= 实际代价 |
容易扩展到其他节点 | 不能保证找到一条最佳路径,但是运算最快 |
 |
此时只有 影响结果,A*变成BFS 影响结果,A*变成BFS |
因此,我们需要根据不同的使用场景,来设计不同的启发函数。如果你想要有更快的运行速度,那就设计一个更大的启发函数,但是你就得牺牲结果,A找到的可能就不是一条最短的路径;如果你想要最短的路径,那就设计一个小点的启发函数,但是你就得牺牲运行时间。最佳的效果是无限的逼近实际的代价,这样A就既能得到一个最佳路径,又不会浪费过多时间。
栅格地图中的启发函数
在栅格地图中,有几个广为人知的启发函数可以使用。
在栅格地图中,不同的移动方式应该匹配不同的启发函数:
- 如果移动方向是四邻域的,那应该使用曼哈顿距离去计算启发函数;
- 如果移动方向是八邻域的,那应该使用对角线距离去计算启发函数;
- 如果是在正方形网格上任意方向移动的,则可能需要欧几里得距离,但是如果在网格上找路径,但不在网格上移动,那就得需要考虑其他的计算方式了;
- 如果是在六边形网格上移动,具有6个方向,则可以用适合六边形网格的曼哈顿距离;
在计算的时候,必须保证 和
和 计算的单位是一致的。例如,如果是以米为单位进行测量的,距离为3个方格,每个方格10米,则启发函数的预估成本应该是
计算的单位是一致的。例如,如果是以米为单位进行测量的,距离为3个方格,每个方格10米,则启发函数的预估成本应该是  米。如果是以分钟为单位进行测量的,距离3个方格,每个方格移动需要5分钟,则启发函数的预估成本应该是
米。如果是以分钟为单位进行测量的,距离3个方格,每个方格移动需要5分钟,则启发函数的预估成本应该是  分钟。
分钟。
曼哈顿距离
欧几里得距离标明两个点在标准的坐标系上的绝对轴的距离总和,即:

曼哈顿距离的计算方式适用于只有四个方向可移动的场景中。即,你的移动方向是四邻域的,那么曼哈顿距离是最佳的选择。

D 表示的是移动方块的权重,你可以设置它为10或者1都可以。
对角线距离
如果你的地图允许对角线移动,则需要用一个不同的启发函数,对角线距离。
对角线距离又称为切比雪夫距离(wiki),表示两个点之间的距离定义为其各坐标数差值的最大值。
假设直线移动和对角线移动的代价成本都是D,则

但是,如果对角线运动的代价不是 ,则是类似于
,则是类似于 ,那么,更准确的对角线距离计算公式应该是:
,那么,更准确的对角线距离计算公式应该是:

欧几里得距离
如果是可以沿任意角度移动(而不是网格方向),那么也许可以使用直线距离。

使用欧几里得距离计算的距离会比曼哈顿或者对角线距离还短,但是还是可以得到一个最短路径,只是将耗费更多的时间。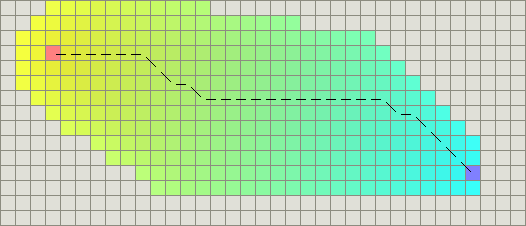
平方后的欧几里得距离
也有通过对距离的平方来避开欧几里得距离中的平方根计算,为了机器计算时的运算时间。

但是不要这么做,这会明显的导致衡量单位的问题。此时的计算将会使得 的结果恒大于
的结果恒大于 ,将会导致因为启发式函数评估值过高而停止。对于较长的距离,这将到接近
,将会导致因为启发式函数评估值过高而停止。对于较长的距离,这将到接近 的极值,而
的极值,而 并不影响,而A*将退化成BFS。
并不影响,而A*将退化成BFS。
Breaking Ties(打破平局)
在一次的搜索过程中,可能会有存在多个相同的 ,他们都会被搜索。因此出现了在搜索对比中的平局的局面。
,他们都会被搜索。因此出现了在搜索对比中的平局的局面。
解决这个问题,可以为启发函数增加一个附加值。附加值对于结点必须是确定性的(也就是说,不能是随机数),而且它必须让 的值体现差异。
的值体现差异。
在 上增加一个衡量单位 p 值。
上增加一个衡量单位 p 值。

选择因子p使得p < 移动一步(step)的最小代价的最长路径长度
假设不希望路径超过1000步,可以使 p = 1 / 1000
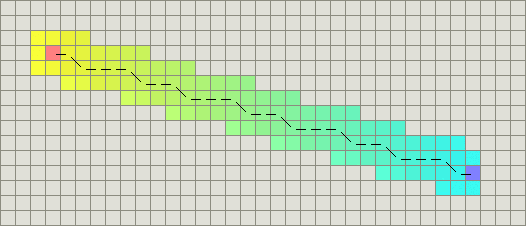
添加这个附加值的结果是,A比以前搜索的结点更少了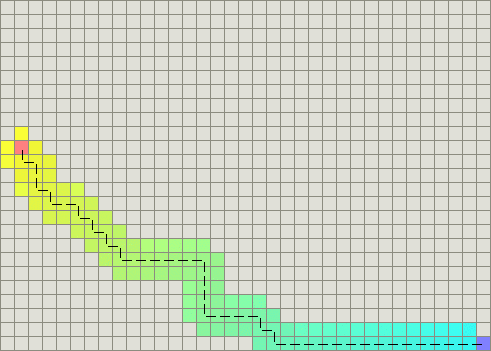
当存在障碍物时,当然仍要在他们周围寻找路径,但是当越过障碍物之后,A搜素的区域将非常少。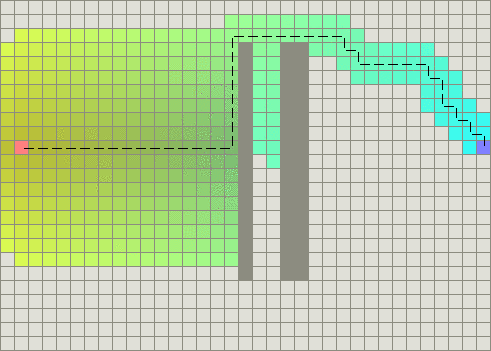
当然,对于要打破局面的做法,还有一个更直接的方法。
如果对于两个 相同的结果,那么可以对比
相同的结果,那么可以对比 的值,以此来打破这个平局(breaking ties)。
的值,以此来打破这个平局(breaking ties)。
还有另外一种方法,就是在启发式函数上添加一个确定性的随机数,这个随机数时计算坐标的哈希值。
第四种解决这个问题的方法。
对于启发式函数的计算,选择从初始点到目标点的连线。

对于这样的方法,A在选择路径时会稍微更倾向于从初始点到目标点的直线,当没有障碍物时,A不仅搜索的区域很少,而且它找到的路径看起来也非常的棒。
然而,因为这种方法是更倾向于起点到终点的直线连接,因此当出现了障碍物时,就会出现很奇怪的现象。

若有收获,就点个赞吧
0 人点赞
