散列表用的是数组支持按照下标随机访问数据的特性,所以散列表其实就是数组的一种扩展,由数组演化而来。可以说,如果没有数组,就没有散列表。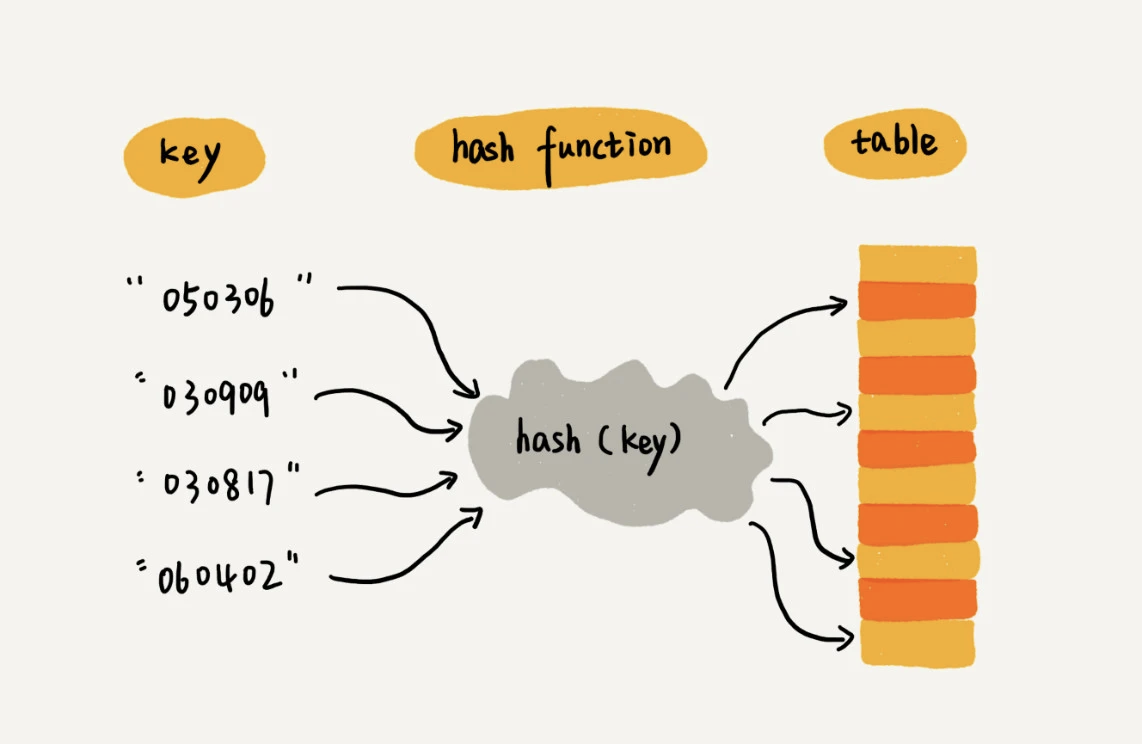
散列表用的就是数组支持按照下标随机访问的时候,时间复杂度是 O(1) 的特性。我们通过散列函数把元素的键值映射为下标,然后将数据存储在数组中对应下标的位置。当我们按照键值查询元素时,我们用同样的散列函数,将键值转化数组下标,从对应的数组下标的位置取数据。
散列函数
散列函数,顾名思义,它是一个函数。我们可以把它定义成 hash(key),其中 key 表示元素的键值,hash(key) 的值表示经过散列函数计算得到的散列值。
散列函数设计的基本要求:
- 散列函数计算得到的散列值是一个非负整数;
- 如果 key1 = key2,那 hash(key1) == hash(key2);
- 如果 key1 ≠ key2,那 hash(key1) ≠ hash(key2)。
但是实际上第三点是很难实现的,再好的散列函数也无法避免散列冲突
散列冲突解决办法-开放寻址法
开放寻址法(open addressing)的核心思想是,如果出现了散列冲突,我们就重新探测一个空闲位置,将其插入。
那如何重新探测新的位置呢?
线性探测(Linear Probing):
当我们往散列表中插入数据时,如果某个数据经过散列函数散列之后,存储位置已经被占用了,我们就从当前位置开始,依次往后查找,看是否有空闲位置,直到找到为止。
二次探测(Quadratic Probing):
跟线性探测很像,线性探测每次探测的步长是 1,那它探测的下标序列就是 hash(key)+0,hash(key)+1,hash(key)+2……而二次探测探测的步长就变成了原来的“二次方”,也就是说,它探测的下标序列就是 hash(key)+0,hash(key)+12,hash(key)+22……
双重散列(Double hashing):
所谓双重散列,意思就是不仅要使用一个散列函数。我们使用一组散列函数 hash1(key),hash2(key),hash3(key)……我们先用第一个散列函数,如果计算得到的存储位置已经被占用,再用第二个散列函数,依次类推,直到找到空闲的存储位置。
不管采用哪种探测方法,当散列表中空闲位置不多的时候,散列冲突的概率就会大大提高。为了尽可能保证散列表的操作效率,一般情况下,我们会尽可能保证散列表中有一定比例的空闲槽位。我们用装载因子(load factor)来表示空位的多少。
装载因子的计算公式是:散列表的装载因子=填入表中的元素个数/散列表的长度
装载因子越大,说明空闲位置越少,冲突越多,散列表的性能会下降。
散列冲突解决办法-链表法
链表法是一种更加常用的散列冲突解决办法,相比开放寻址法,它要简单很多。
在散列表中,每个“桶(bucket)”或者“槽(slot)”会对应一条链表,所有散列值相同的元素我们都放到相同槽位对应的链表中。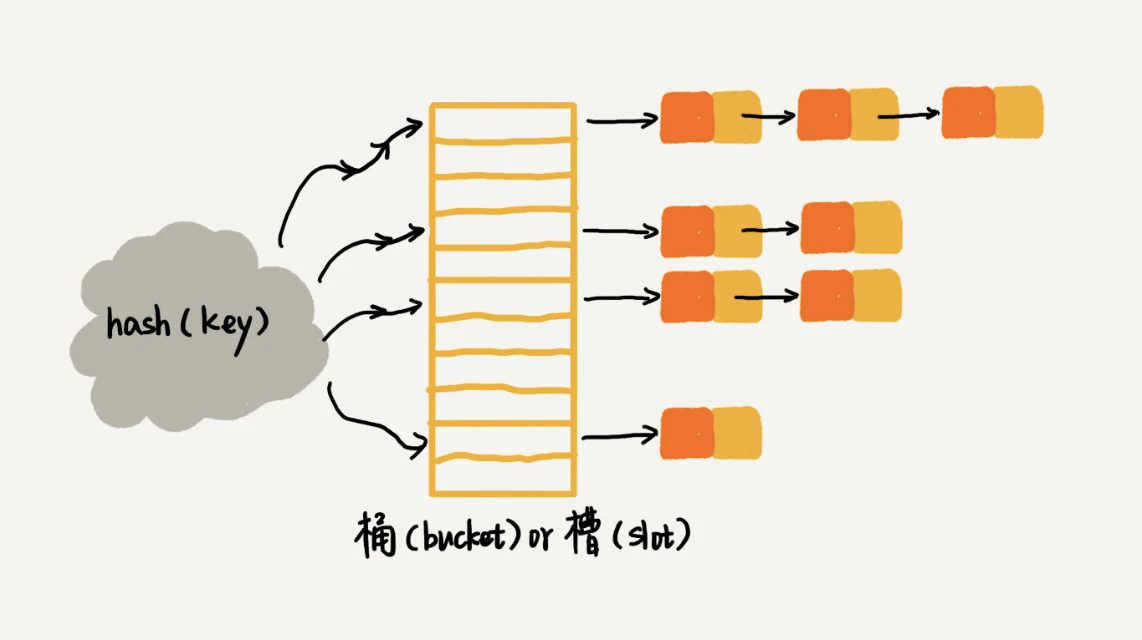

若有收获,就点个赞吧
0 人点赞
