作者: Rachelint
背景
我们团队在 futures 0.1 版本时便在项目中对其进行了广泛使用,但 futures 发展到 0.3 加上 rust 引入了async/await 关键字后,明显具有了更高的可读性和可维护性,将 futures crate 进行版本升级是迟早要做的事情。但是如果一次性将项目中所有相关代码进行升级,工作量之大明显是难以接受的,稳定性方面也难以确保。因此我们决定利用 futures 0.3 提供的兼容层,对 futures 相关代码进行逐步升级。
在本文中,我想分享一下对兼容层实现的一些理解,还有在实践中得到的一些经验。文章大致分为三部分:
- 兼容层的大致使用方法
- 兼容层原理分析
- 实践经验
部分观点可能存在过于主观,或者存在错误等情况,欢迎指正。
1. Future01 和 Future03 的区别
首先看看两个版本中trait的声明 (在文中,futures 0.1 的 Future trait 称为 Future01,而 futures 0.3 的称为 Future03,下同):
// 0.1pub trait Future {type Item;type Error;fn poll(&mut self) -> Poll<Self::Item, Self::Error>;}// 0.3pub trait Future {type Output;fn poll(self: Pin<&mut Self>, cx: &mut Context) -> Poll<Self::Output>;}
可以看出,主要有三处不同:
- Future01 有两个关联类型 Item 和 Error,因为其中的 Poll 其实就是一个特殊的 Result 类型;
而 Future03 则只有一个关联类型 Output,而其中的 Poll 变为一个枚举类型; - Future03 poll 中的参数之一从 Future01 中的 &mut self 变为了Pin<&mut Self>;
- Future03 poll 中多了一个参数cx: &mut Context;
这里主要简单介绍一下第2和第3点区别:
Future03 为什么需要 Pin<&mut Self>?首先 Pin 只会限制实现了 !Unpin 的类型的移动,而 rust 只为一些如下特例实现了 !Unpin:
- PhantomPinned;
- 编译器为 async/await desugar 之后生成的 impl Future结构体;
很明显,Pin 主要是为了解决 async/await 自动生成 Future 的问题,那问题就是自引用,移动自引用结构体会造成指针失效。限于篇幅问题,这里先不再展开了,想更详细地了解关于 Pin 的知识,推荐阅读以下文章:
- Future03 为什么需要 cx: &mut Context?现在 Context 当中还是只有一个 waker: &Waker 成员,新加入这个参数,按个人理解主要是用于改变按个人理解主要是用于改变 Waker(在01中起相同作用的是Notify) 设置和在 poll(..) 中对其进行获取的方式。
Future01 中 notify 的传入与获取大致流程: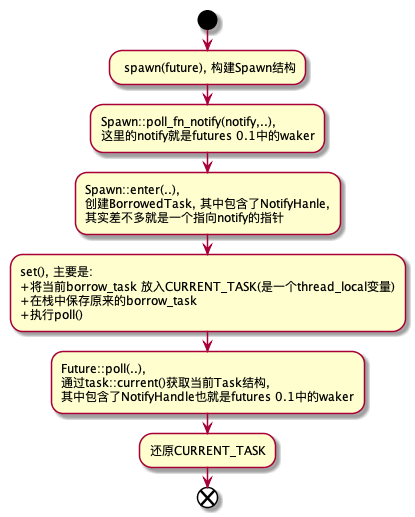
Future 0.3 中 notify 的传入与获取大致流程:
很明显,实现 Future01 和 03 相互间的转换只要解决以后区别即可,而实际的实现大致上也是这么一个思路。
2. 使用方法
我们的目的是在项目中让 futures 0.1 和 0.3 相关内容并存,并根据需要实现它们之间的相互转换。
Cargo.toml 配置
- 首先要解决 futures 0.1 和 futures 0.3 两个 crate 都叫 futures 的问题。利用 cargo 提供的重命名功能即可,由于项目中暂时还是以 futures 0.1为主,因此把 futures 0.3 重命名为了 future03。
[dependencies]futures = "0.1"futures03 = { package = "futures", version = "0.3" }
- 然后需要解决它们之间的相互转换的问题。这里可以启用 futures 0.3 提供的 compat feature,可以使用组合子的方式很方便解决相互转换的问题,在 Cargo.toml 中进行简单设置即可启用。
[dependencies]futures = "0.1"futures03 = { package = "futures", version = "0.3", features = ["compat"] }
转换方法
那么具体要如何相互转换呢?
这比较简单,利用compat组合子就可以直接实现了。
use futures::future::Ok;use futures03::compat::Future01CompatExt;use futures03::executor::block_on;fn main() {let fut01 = futures::future::ok::<i32, ()>(42);let fut03 = fut01.compat();let res = block_on(fut03);println!("the fut03 res:{}", res.unwrap());}
Future03 转 Future01。这就没那么简单了,能转 Future01 的 Future03 需要满足以下两个限制(文章后面会解析为什么):
- 这个 Future03 需要是一个TryFuture。怎样的 Future03 才会是 TryFuture 呢?其实很简单,关联类型 Output 为 Result 就行了,看相关源码就很容易知道,会自动为这类 Future 实现 TryFuture:
impl<F, T, E> TryFuture for FwhereF: ?Sized + Future<Output = Result<T, E>>,{...}
- 这个 Future03 需要是 Unpin 的。Pin 解析起来比较复杂,这里就先不进行解析了,留到后面。
所以如果当前的 Future03 既不是 TryFuture,也不是 Unpin 的。那要怎么转 Future01 呢?还是利用组合子就可以解决了。
unit_error 组合子可以通过将 Future03
而 boxed 组合子则可以通过将其放到堆区的方法使之满足 Unpin,从而解决问题2。
use futures03::future::{FutureExt, TryFutureExt};use futures::Future;async fn make_fut03() -> i32 {42}fn main() {// 这是一个既不是TryFuture也不满足Unpin的Futurelet fut03 = make_fut03();// let fut01 = fut03.compat(); 错误做法,编译时会报不满足trait限制的错let fut01 = fut03.unit_error().boxed().compat();let res = fut01.wait();println!("the fut01 res:{}", res.unwrap());}
3. 原理分析
Compat01As03 分析
接下来,按照以上思路简单分析一下在 futures03::compat 的具体实现,先介绍 Future01 到 Future03 的转换,主要逻辑为位于 compat/compat01as03.rs 中。
- 关于关联类型和 Poll 的转换:
#[derive(Debug)]#[must_use = "futures do nothing unless you `.await` or poll them"]pub struct Compat01As03<T> {pub(crate) inner: Spawn01<T>,}impl<Fut: Future01> Future03 for Compat01As03<Fut> {type Output = Result<Fut::Item, Fut::Error>;fn poll(mut self: Pin<&mut Self>, cx: &mut Context<'_>) -> task03::Poll<Self::Output> {poll_01_to_03(self.in_notify(cx, Future01::poll))}}fn poll_01_to_03<T, E>(x: Result<Async01<T>, E>) -> task03::Poll<Result<T, E>> {match x? {Async01::Ready(t) => task03::Poll::Ready(Ok(t)),Async01::NotReady => task03::Poll::Pending,}}
可以看到,Compat01As03 被实现为 Future03
- 关于 Pin,直接为 Compat01As03 实现了 Unpin。个人看法,在这个源文件中没发现对 T 为 Unpin 的限制,或许是因为是当前如果要自行实现自引用结构,只能使用 unsafe 的缘故?
impl<T> Unpin for Compat01As03<T> {}
- 将 Waker 转换为 NotifyHandle:
struct NotifyWaker(task03::Waker);#[allow(missing_debug_implementations)]#[derive(Clone)]struct WakerToHandle<'a>(&'a task03::Waker);impl From<WakerToHandle<'_>> for NotifyHandle01 {fn from(handle: WakerToHandle<'_>) -> Self {// 将waker放到堆区let ptr = Box::new(NotifyWaker(handle.0.clone()));// 获取指针放到NotifyHandle中unsafe { Self::new(Box::into_raw(ptr)) }}}// 将waker封装一层后为其实现Notify,// notify方法的实现其实就是直接调用waker.wake_by_ref()impl Notify01 for NotifyWaker {fn notify(&self, _: usize) {self.0.wake_by_ref();}}// 在上一节所列的源码中,可以看到in_notify的身影,在这里看到:// in_notify的作用就是将Waker转化而成的NotifyHanle传入到Spawn::poll_fn_notify中,// 之后的过程就可以参考之前的流程图了fn in_notify<R>(&mut self, cx: &mut Context<'_>, f: impl FnOnce(&mut T) -> R) -> R {let notify = &WakerToHandle(cx.waker());self.inner.poll_fn_notify(notify, 0, f)}
如上所述,主要实现思路还是比较简单的,将 Waker 放到堆区,然后获取其指针放到 NotifyHanle,然后将构建出的 NotifyHanle 传到 Spawn::poll_fn_notify 中。这样在调用 task.notify() 对内层 Futures01 进行唤醒时,就能转而调用外层 Compat01As03 的 waker.wake_by_ref(),对其进行唤醒,其他相关函数同理。
Compat 分析
Future03 到 01 的思路也是比较类似的,主要逻辑位于 compat/compat03as01.rs。
- 关于关联类型和Poll的转换:
#[derive(Debug, Clone, Copy)]#[must_use = "futures do nothing unless you `.await` or poll them"]pub struct Compat<T> {pub(crate) inner: T,}fn poll_03_to_01<T, E>(x: task03::Poll<Result<T, E>>) -> Result<Async01<T>, E> {match x? {task03::Poll::Ready(t) => Ok(Async01::Ready(t)),task03::Poll::Pending => Ok(Async01::NotReady),}}impl<Fut> Future01 for Compat<Fut>where// 注意这里,对Fut进行了限制,需要实现TryFuture03和UnpinFut: TryFuture03 + Unpin,{type Item = Fut::Ok;type Error = Fut::Error;fn poll(&mut self) -> Poll01<Self::Item, Self::Error> {with_context(self, |inner, cx| poll_03_to_01(inner.try_poll(cx)))}}
可以看到,Compat 被实现为 Future01
- 关于 Pin,Future03 一般是由 async/await 自动生成而来的,而入本章第一节所示,该自动生成的 Future 是少数由rust 自动实现 !Unpin 的类型之一,所以这里进行了限制,只会有关联类型 T 满足 Unpin的Compat 实现Future01。
当想要将 async/await 自动生成的 Future03(大多数情况下) 转化为 Future01 时,必须先调用boxed 组合子
重建构建一个满足 Unpin的 新 Future03。
- 将 NotifyHandle 转换为 Waker:
#[derive(Clone)]struct Current(task01::Task);impl Current {fn new() -> Self {// 注意了, 这里是不是很眼熟, task::current()可以获取当前的Task结构,// 然后利用其构建Current结构,并转换为空指针在构建RawWaker时候传入,// 最后再经由vtable调用并传参到wake中,最终进行熟悉的task.notify()调用。Self(task01::current())}fn as_waker(&self) -> WakerRef<'_> {// 对指针解引用后获取再借用unsafe fn ptr_to_current<'a>(ptr: *const ()) -> &'a Current {&*(ptr as *const Current)}// 将self转为void*fn current_to_ptr(current: &Current) -> *const () {current as *const Current as *const ()}// vtable中需要实现的方法 ////////////////////////////////unsafe fn clone(ptr: *const ()) -> RawWaker {...}unsafe fn drop(_: *const ()) {}unsafe fn wake(ptr: *const ()) {ptr_to_current(ptr).0.notify()}////////////////////////////////////////////////////////// 将self转化为空指针,主要为了之后构建RawWaker时传入let ptr = current_to_ptr(self);// 构建vtablelet vtable = &RawWakerVTable::new(clone, wake, wake, drop);// 构建RawWaker,构建WakerWakerRef::new_unowned(std::mem::ManuallyDrop::new(unsafe {task03::Waker::from_raw(RawWaker::new(ptr, vtable))}))}}
在注释中已经说的较为详细了,具体的思路和 Compat01As03 是类似的,为了能在调用内层 Future03 waker.wake()/waker.wake_by_ref() 时,能转而调用到外层 Compat 的 task.notify(),从而对其进行唤醒,其他相关函数亦同理。
4. 一些实践经验
如何较好地进行局部升级
在这次的任务中,我需要对特定路径进行 futures 0.1 到 0.3 的升级,以适配想要加入到项目中的 crate。我想趁机在相关路径上引入 async/await,以提高代码可读性和可维护性。在实现的过程中,主要遇到了两个问题:
- 当前 Trait 不支持 async fn;
- 还需要保持旧的 runtime,因为如果升级 runtime 的话,影响太大(几乎要对整个项目所有相关的地方进行升级);
对于 Trait 不支持 async fn 的问题,暂时可以通过使用第三方库 async-trait 来解决,使用方法很简单。其大致原理是,async_trait 宏将代码转换为一个返回 Pin<Box<dyn Future + Send + ‘async>> 的同步方法。
use futures03::executor::block_on;use async_trait::async_trait;#[async_trait]trait TestTrait {async fn method1(&self);async fn method2(&self);}struct TestStruct;#[async_trait]impl TestTrait for TestStruct {async fn method1(&self) {println!("I am async method1");}async fn method2(&self) {println!("I am async method2");}}fn main() {let ts = TestStruct;block_on(ts.method1());block_on(ts.method2());}
那么如何有效地在保持旧版本 runtime 的情况下,将调用路径升级到 async/await 方式呢?个人比较推荐将最底层返回的 Future01 使用 compat 组合子转为 03,然后中间路径一直使用 async/await,再在最上层再次使用 compat 等组合子再次转为 Future01,放入到旧版 runtime 执行,示例如下:
use futures::Future;use futures03::compat::Future01CompatExt;use futures03::{FutureExt, TryFutureExt};use futures_cpupool::CpuPool;type BoxedFuture<T> = Box<dyn Future<Item = T, Error = ()> + Send>;fn func1() -> BoxedFuture<i32> {Box::new(futures::future::ok(42))}async fn func2() -> Result<i32, ()> {// convert to Future 0.3let res1_compat_03 = func1().compat().await?;Ok(res1_compat_03 + 42)}async fn func3() -> Result<i32, ()> {let res2_03 = func2().await?;Ok(res2_03 + 42)}fn main() {let pool = CpuPool::new(4);let fut03 = func3();// convert back to Future 0.1let fut01 = fut03.boxed().compat();// spawn to the old runtimelet res = pool.spawn(fut01).wait();println!("res:{}", res.unwrap());}
返回 Future 的函数和 async fn 的区别
在 futures 0.1 中,由于没有 async fn 所以返回 Future 的函数是一种比较普遍的写法,例如:
type BoxedFuture<T> = Box<dyn Future<Item = T, Error = ()> + Send>;fn func1() -> BoxedFuture<i32> {Box::new(futures::future::ok(42))}
但这和 async fn 其实是有着微妙的区别,借用 minitrace-rust crate 来进行示例(这里返回的是 Future03,因为这是 01 和 03 共有的区别,用 01 来写这例子的话要多次来回 compat,代码非常绕)
use futures03::{Future as Future03, FutureExt};use minitrace::{CollectArgs, FutureExt as MiniFutureExt, Span};use std::pin::Pin;type BoxedFuture<T> = Pin<Box<dyn Future03<Output=T> + Send>>;async fn func1() -> i32 {42}// async fn func2() -> i32 {// func1().in_span(Span::from_local_parent("func1")).await// }fn func2() -> BoxedFuture<i32> {func1().in_span(Span::from_local_parent("func1")).boxed()}#[tokio::main]async fn main() {let (span, collector) = Span::root("func2");let f = func2().in_span(span);tokio::spawn(f).await.unwrap();let spans = collector.collect_with_args(CollectArgs::default().sync(true));for span in spans {println!("span: event:{}, id:{}, pid:{}", span.event, span.id, span.parent_id);}}##当前结果:span: event:func2, id:1, pid:0##注释掉func2,而去除async func2注释后结果:span: event:func1, id:65537, pid:1span: event:func2, id:1, pid:0
可以看出,当把 async fn func2() -> i32 改成 func2() -> BoxedFuture 后,func1 相关的 span 生成失败了 (Span::from_local_parent(“func1”)),这是为什么呢?
我刚开始遇到这个问题时也被搞晕了,后来用调试器进行跟踪,发现问题主要在于各层次 Future 生成和 poll() 执行顺序方面。
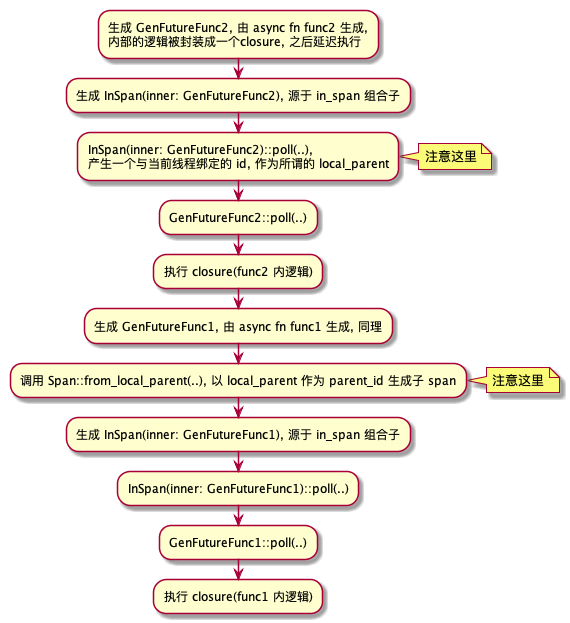
- async fn 情况下的大致执行顺序,GenFutureFuncx 表示 funcx 所生成或返回的 Future:
- 返回 Future 的 fn 情况下的可能执行顺序:
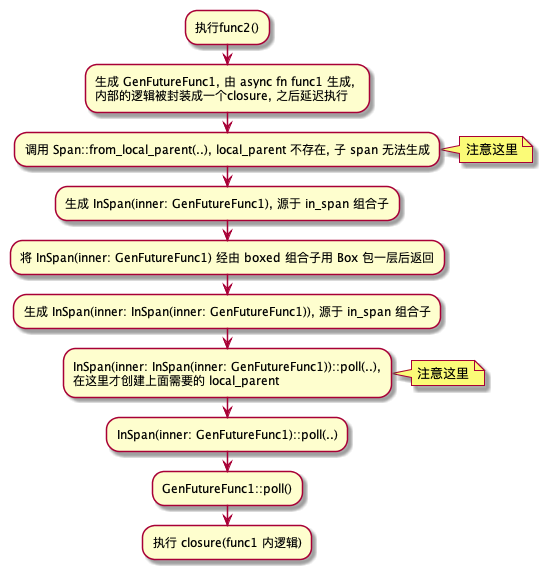
正如流程图中所示,导致最终结果差别的,正是 Span::from_local_parent() 和 最外层 InSpan::poll() 执行的先后顺序不同(在上述流程图中对这两个步骤进行了相关标注)。
因为经过在 InSpan::poll() 中会将进行一些操作,产生一个与当前线程绑定的 span_id 作为所谓的local_parent,而在返回 Future 的情况下,Span::from_local_parent() 先于 最外层 InSpan::poll() 执行从而导致了前者的执行失败,因为 local_parent 在其执行时根本还没被构建。
这个差别比较隐蔽,一般也不会造成影响,毕竟 Future::poll() 的执行顺序还是正确的,但在以上例子中还是使执行结果产生了差异,还是值得稍微知道一下的。
5. 总结
以上为本人对 futures 兼容层的一些理解和经验,之前由于要进行这方面的工作,看了比较多的相关资料,但一直没空进行梳理。这次重新看了一下并进行总结,感觉还是收获颇大的。
参考

若有收获,就点个赞吧
0 人点赞
