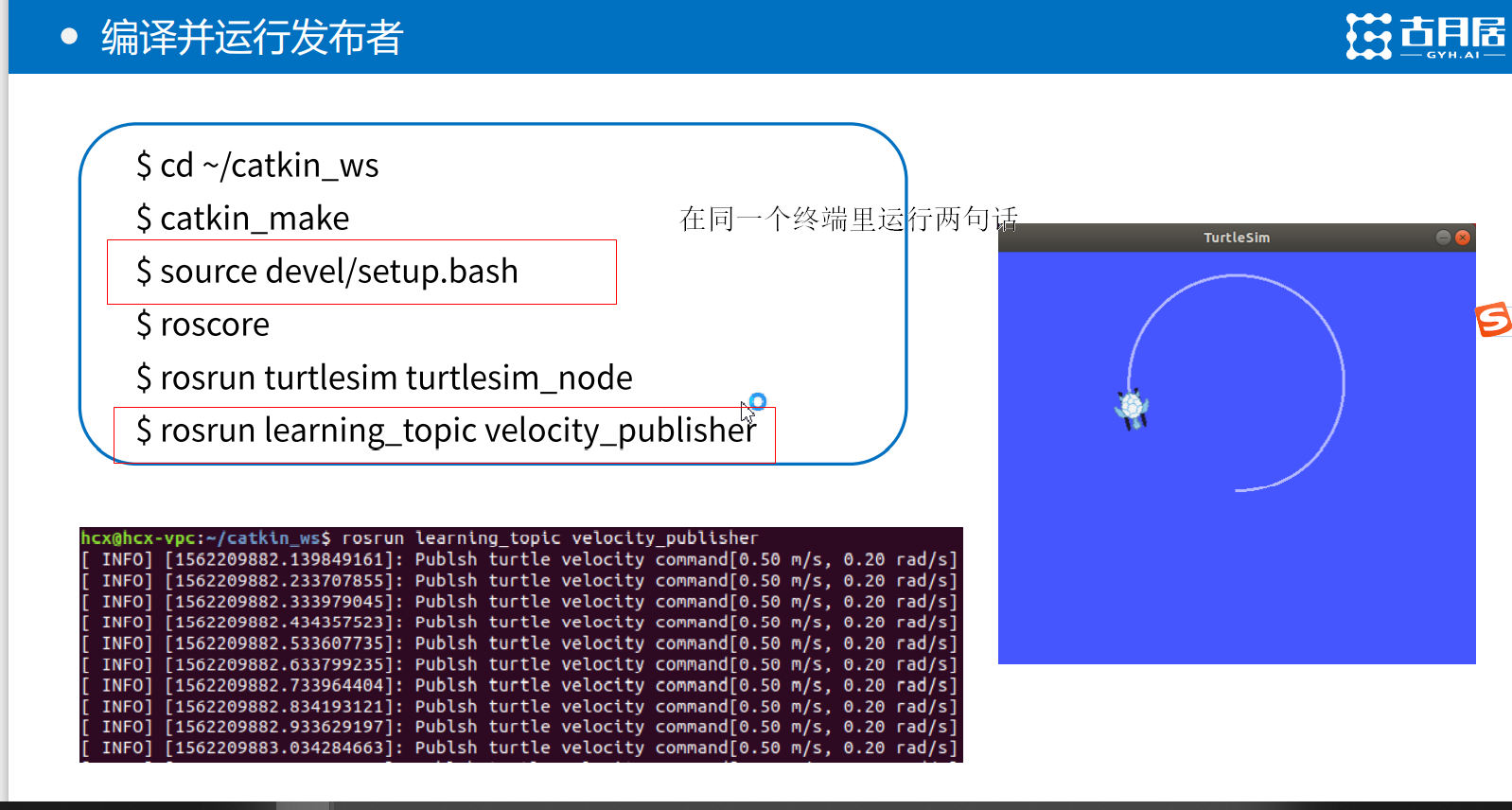
实现功能:发布节点发送速度指令给接受节点(海龟仿真器),让海龟移动。
C++流程:
创建功能包 目的:之后的程序代码都放在该功能包下 疑问:ros的功能包建立略嫌麻烦,功能优势?
创建发布者代码 目的:生成节点、告诉rosmaster,创建消息数据、循环发布消息 疑问:比python实现略显麻烦,优势?
在cmakelist中配置编译信息
编译,更新环境变量,运行
问题:
ros master的作用?
发布者只负责把数据放进管道(话题)里,接收者需要从管理者那里拿到管道的地址、名字才能到管道另一端接收。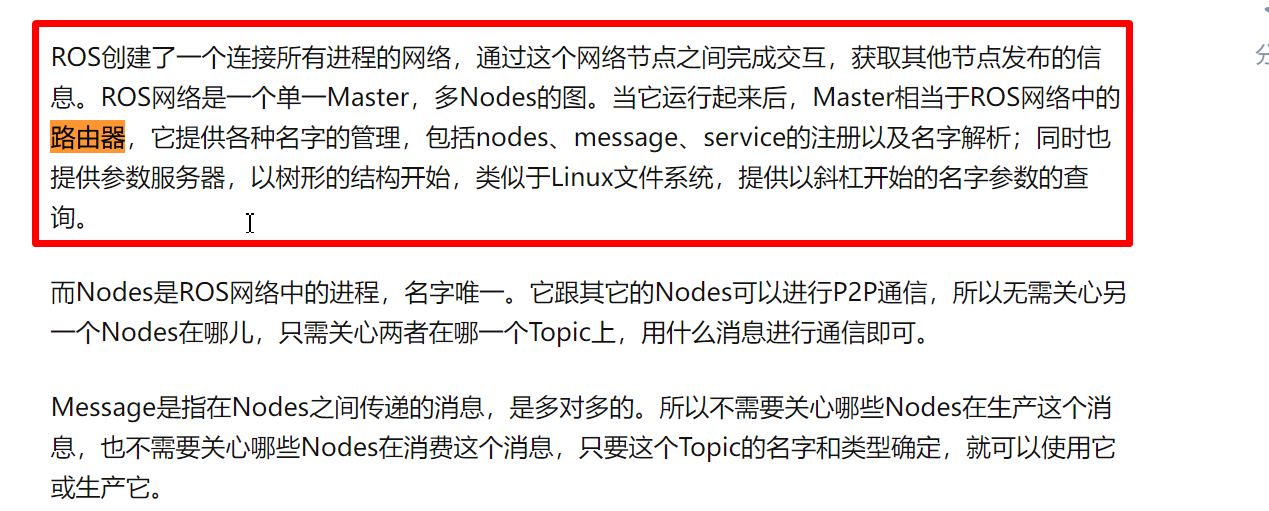

cmakelist作用?
描述了如何编译代码以及将其安装到哪里
catkin_make的作用? 编译
如果没有cmakelist,为什么无法编译呢? 应该也可以,但是如果在cmakelist中写好要编译的文件和依赖库,可以一键编译所有要编译的文件。
source 的作用? 更新环境变量
值得注意
catkin_make必须在主工作空间下运行
如果想避免每次都source一遍,可以在home-detectory下ctrL+H后找到.bashrc,然后在最后一行: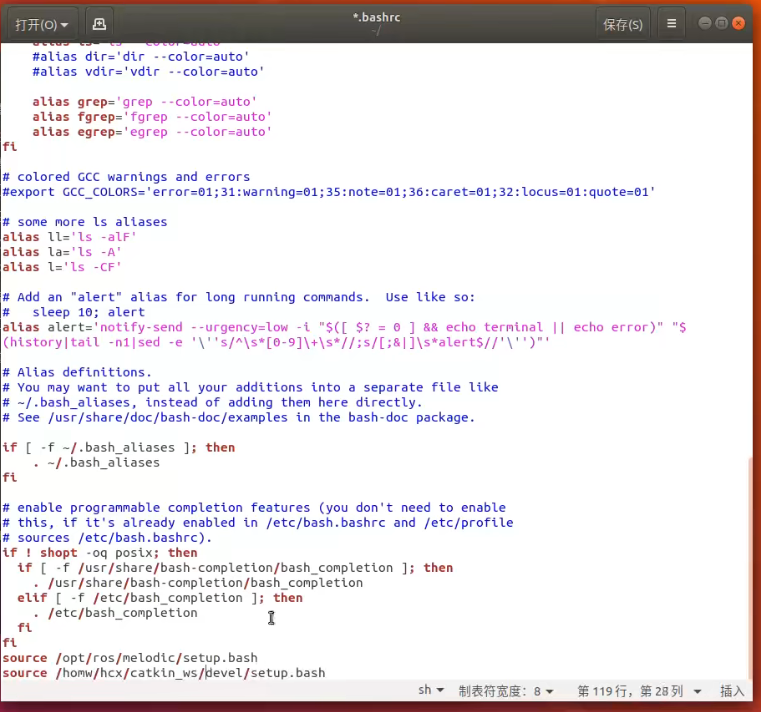
添加后,可以在任意路径下运行rosrun命令
如果要运行python版本,需要在属性里面设置,在“执行”处打上对钩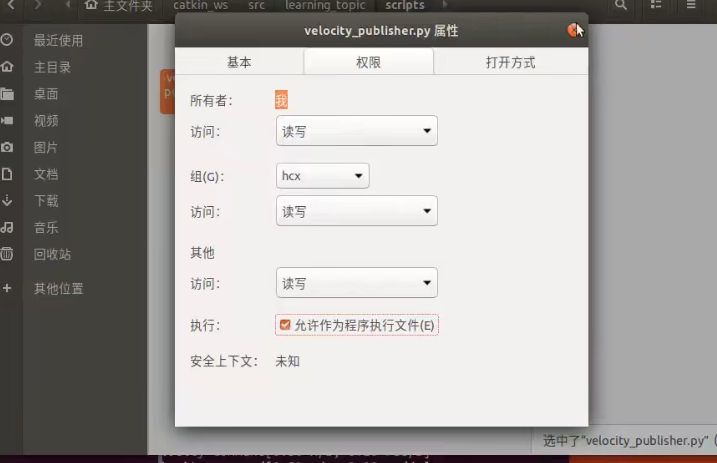

若有收获,就点个赞吧
0 人点赞
