1 LSTM生成文本序列
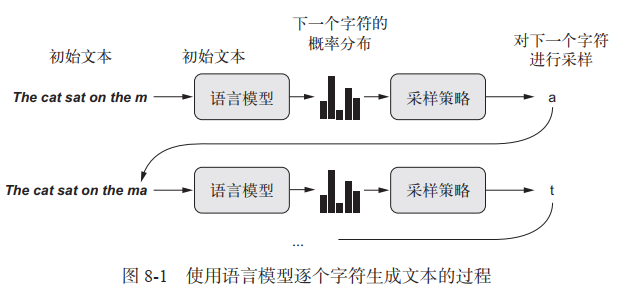
用深度学习生成序列数据的通用方法,就是使用前面的标记作为输入,训练一个网络(通常是循环神经网络或一维卷积神经网络,该网络被称为语言模型)来预测序列中接下来的一个或多个标记。其过程如下:
1.1 采样策略
生成文本时,如何选择下一个字符至关重要。贪婪采样和完全随机采样都不是很理想。
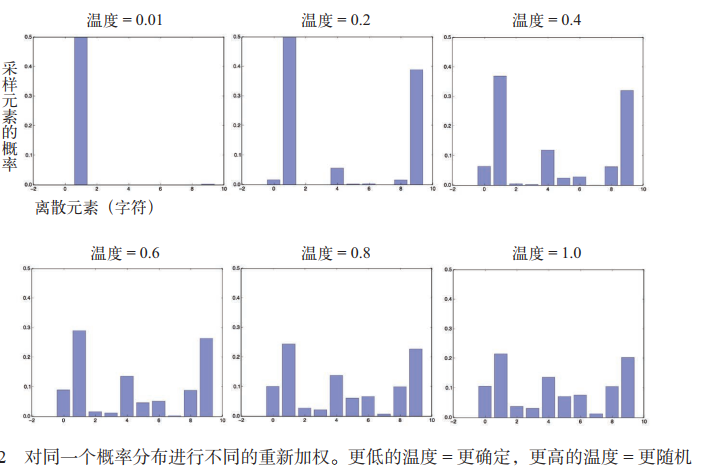
为了在采样过程中控制随机性的大小,可以使用softmax温度参数,用于表示采样概率分布的熵,即表示所选择的下一个字符会有多么出人意料或多么可预测。
给定一个 temperature 值,将按照下列方法对原始概率分布(即模型的 softmax 输出)进行重新加权,计算得到一个新的概率分布,然后再进行随机采样:
# 函数:给定模型预测结果,采样下一个字符def selectNextChar(perds, temperature=1.0):preds = np.asarray(perds).astype('float64')# 根据softmax温度,对分布重新加权preds = np.log(preds) / temperatureexp_preds = np.exp(preds) # 指数运算preds = exp_preds / np.sum(exp_preds)# 加权后,对下一字符进行随机采样index = np.random.multinomial(1, preds, 1)return np.argmax(index) # 返回下一字符index
更高的温度得到的是熵更大的采样分布,会生成更加出人意料、更加无结构的生成数据;而更低的温度对应更小的随机性,以及更加可预测的生成数据。
1.2 LSTM生成文本代码
Note: 利用更多的数据训练一个更大的模型,并且训练时间更长,生成的样本会比上面的结果看起来更连贯、更真实。但是,不要期待能够生成任何有意义的文本,除非是很偶然的情况。你所做的只是从一个统计模型中对数据进行采样,这个模型是关于字符先后顺序的模型。语言是一种信息沟通渠道,信息的内容与信息编码的统计结构是有区别的。
# 使用循环神经网络LSTM层生成序列文本import randomimport sysimport kerasimport numpy as npfrom keras import layers# 下载解析初始文本,这里用尼采的作品数据path = keras.utils.get_file('nietzsche.txt',origin='https://s3.amazonaws.com/text-datasets/nietzsche.txt')text = open(path).read().loswe() # 读取所有文本,转换为小写# 将字符向量化,one-hot编码max_len = 60 # 提取60个字符组成的序列step = 3 # 每三个字符采样一个新序列sentences = [] # 保存提取的序列next_chars = [] # 保存下一目标for i in range(0, len(text) - max_len, step):sentences.append(text[i:i + max_len])next_chars.append(text[i + max_len])print('number of sequences:', len(sentences))chars = sorted(list(set(text)))# 字典,将唯一字符映射为索引位置char_indices = dict((char, chars.index(char)) for char in chars)# 对字符one-hot编码x = np.zeros((len(sentences), max_len, len(chars)), dtype=np.bool)y = np.zeros((len(sentences), len(chars)), dtype=np.bool)for i, sentence in enumerate(sentences):for t, char in enumerate(sentence):x[i, t, char_indices[char]] = 1y[i, char_indices[next_chars[i]]] = 1# 构建网络model = keras.models.Sequential()model.add(layers.LSTM(128, input_shape=(max_len, len(chars))))model.add(layers.Dense(len(chars), activation='softmax'))model.compile(loss='categorical_crossentropy', optimizer='rmsprop')# 文本生成循环for epoch in range(1, 60): # 训练60轮print('epoch', epoch)model.fit(x, y, batch_size=128, epochs=1) # 模型在数据上训练一次# 随机选择一个文本种子start_index = random.randint(0, len(text) - max_len - 1)generated_text = text[start_index:start_index + max_len]print('--- Generating with seed: "' + generated_text + '"')for temperature in [0.2, 0.5, 1.0, 1.2]: # 尝试不同的采样温度print('------ temperature:', temperature)sys.stdout.write(generated_text)for i in range(400): # 从种子文本开始,生成400个字符sampled = np.zeros((1, max_len, len(chars)))for t, char in enumerate(generated_text):sampled[0, t, char_indices[char]] = 1. # one-hot编码preds = model.predict(sampled, verbose=0)[0] # 根据模型训练的权重,获取验证结果next_index = selectNextChar(preds, temperature) # 放入采样函数,获取下一字符next_char = chars[next_index]generated_text += next_chargenerated_text = generated_text[1:]sys.stdout.write(next_char)
2 DeepDream
DeepDream 算法与前面的卷积神经网络过滤器可视化技术几乎相同,都是反向运行一个卷积神经网络:对卷积神经网络的输入做梯度上升,以便将卷积神经网络靠顶部的某一层的某个过滤器激活最大化。其过程如下:
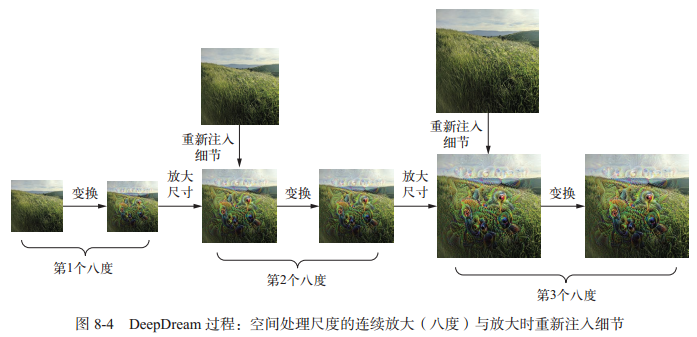
- DeepDream 的过程是反向运行一个卷积神经网络,基于网络学到的表示来生成输入。
- 得到的结果是很有趣的,有些类似于通过迷幻剂扰乱视觉皮层而诱发的视觉伪影。
- 注意,这个过程并不局限于图像模型,甚至并不局限于卷积神经网络。它可以应用于语音、音乐等更多内容
具体示例代码请参考原PDF
3 神经风格迁移
3.1 内容损失和风格损失
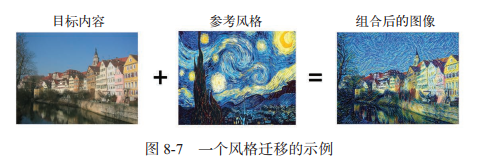
除 DeepDream 之外,深度学习驱动图像修改的另一项重大进展是神经风格迁移。
神经风格迁移是指将参考图像的风格(图像中不同空间尺度的纹理、颜色和视觉图案 )应用于目标图像,同时保留目标图像的内容(图像的高级宏观结构 ), 如下图示例:
你可以使用预训练的卷积神经网络来定义内容损失和风格损失。
- 在目标内容图像和生成图像之间保持相似的较高层激活,从而能够保留内容。卷积神经网络应该能够“看到”目标图像和生成图像包含相同的内容。
- 在较低层和较高层的激活中保持类似的相互关系(correlation),从而能够保留风格。特征相互关系捕捉到的是纹理(texture),生成图像和风格参考图像在不同的空间尺度上应该具有相同的纹理
Note: 神经风格迁移可以用任何预训练卷积神经网络来实现。神经风格迁移的一般过程如下:
- 创建一个网络,它能够同时计算风格参考图像、目标图像和生成图像的激活。
- 使用这三张图像上计算的层激活来定义下面的损失函数,为了实现风格迁移,需要将这个损失函数最小化。
loss = distance(style(reference_image) - style(generated_image)) + distance(content(original_image) - content(generated_image))# distance:范数函数# content:输出图像内容表示# style:输出图像的风格表示# 该loss函数的含义是:风格表示越接近,图像内容越接近,loss越小
- 设置梯度下降过程来将这个损失函数最小化。
实现快速风格迁移的方法是,首先利用下面示例代码介绍的方法,花费大量的计算时间对一张固定的风格参考图像生成许多输入 - 输出训练样例,然后训练一个简单的卷积神经网络来学习这个特定风格的变换。一旦完成之后,对一张图像进行风格迁移是非常快的,只是这个小型卷积神经网络的一次前向传递而已。
3.2 VGG19风格迁移代码示例
# 基于VGG19卷积网络的诗经风格迁移
import time
import numpy as np
from keras import backend as K
from keras.applications import vgg19
from keras.preprocessing.image import img_to_array, load_img
import cv2
from scipy.optimize import fmin_l_bfgs_b
target_path = './base.png' # 要变换的图像的路径
style_path = './style.png' # 风格图像的路径
width, height = load_img(target_path).size
img_height = 400 # 限定宽高
img_width = int(width * img_height / height)
# 辅助函数
def preprocess_img(image_path):
img = load_img(image_path, target_size=(img_height, img_width))
img = img_to_array(img)
img = np.expand_dims(img, axis=0)
img = vgg19.preprocess_input(img)
return img
def deprocess_img(x):
# vgg19.preprocess_input的逆操作
x[:, :, 0] += 103.939
x[:, :, 1] += 116.779
x[:, :, 2] += 123.68
# 将BGR格式转换为RGB格式图像,也是vgg19.preprocess_input逆操作的一部分
x = x[:, :, ::-1]
x = np.clip(x, 0, 255).astype('uint8')
return x
# 加载与训练的VGG19网络,应用于三张图像
target_image = K.constant(preprocess_img(target_path))
style_image = K.constant(preprocess_img(style_path))
combind_image = K.placeholder((1, img_height, img_width, 3))
# 将三张图像合并为一个批量
input_tensor = K.concatenate([target_image, style_image, combind_image],
axis=0)
# 作为VGG19网络模型的输入,进行训练
model = vgg19.VGG19(input_tensor=input_tensor,
weights='imagenet',
include_top=False)
print('Model loaded')
# 定义内容损失,保证目标图像和生成图像在 VGG19 卷积神经网络的顶层具有相似的结果
def content_loss(base, combind):
return K.sum(K.square(combind - base))
# 定义风格损失
# 使用一个辅助函数来计算输入矩阵的格拉姆矩阵
def gram_matrix(x):
feature = K.batch_flatten(K.permute_dimensions(x, (2, 0, 1)))
gram = K.dot(feature, K.transpose(feature))
return gram
def style_loss(style, combind):
S = gram_matrix(style)
C = gram_matrix(combind)
channels = 3
size = img_height * img_width
return K.sum(K.square(S - C)) / (4. * (channels**2) * (size**2))
# 计算总变差损失,对生成的组合图像的像素进行操作。它促使生成图像具有空间连续性,从而避免结果过度像素化
def total_variation_loss(x):
a = K.square(x[:, :img_height - 1, :img_width - 1, :] -
x[:, 1:, :img_width - 1, :])
b = K.square(x[:, :img_height - 1, :img_width - 1, :] -
x[:, :img_height - 1, 1:, :])
return K.sum(K.pow(a + b, 1.25))
# 获取模型中各层的字典,层名称和层输出
outputs_dict = dict([(layer.name, layer.output) for layer in model.layers])
content_layer = 'block5_conv2' # 内容损失,只用VGG19的顶层
# 风格损失,需要用VGG19的所有层
style_layers = [
'block1_conv1', 'block2_conv1', 'block3_conv1', 'block4_conv1',
'block5_conv1'
]
# 计算loss所用的权重
total_variation_weight = 1e-4
style_weight = 1.
content_weight = 0.025
# 定义最终损失,并添加内容损失
loss = K.variable(0.)
layer_features = outputs_dict[content_layer]
target_image_features = layer_features[0, :, :, :]
combination_features = layer_features[2, :, :, :]
loss += content_weight * content_loss(target_image_features,
combination_features)
# 添加每一层的风格损失
for layer_name in style_layers:
layer_features = outputs_dict[layer_name]
style_reference_features = layer_features[1, :, :, :]
combination_features = layer_features[2, :, :, :]
sl = style_loss(style_reference_features, combination_features)
loss += (style_weight / len(style_layers)) * sl
# 添加总变差损失
loss += total_variation_weight * total_variation_loss(combind_image)
# 设置梯度下降过程
grads = K.gradients(loss, combind_image)[0] # 获取损失相对于生成图像的梯度
fetch_loss_and_grads = K.function([combind_image],
[loss, grads]) # 获取当前损失之和当前梯度值的函数
# 类,将 fetch_loss_and_grads 包装起来,让你可以利用两个单独的方法调用来获取损失和梯度,这是我们要使用的 SciPy 优化器所要求的
class Evaluator(object):
def __init__(self):
self.loss_value = None
self.grads_values = None
def loss(self, x):
assert self.loss_value is None
x = x.reshape((1, img_height, img_width, 3))
outs = fetch_loss_and_grads([x])
loss_value = outs[0]
grad_values = outs[1].flatten().astype('float64')
self.loss_value = loss_value
self.grad_values = grad_values
return self.loss_value
def grads(self, x):
assert self.loss_value is not None
grad_values = np.copy(self.grad_values)
self.loss_value = None
self.grad_values = None
return grad_values
evaluator = Evaluator() # 实例化类
# 神经风格迁移循环
# 使用L_BFGS算法运行梯度上升,在算法每一次迭代时白痴当前的生成图像
result_prefix = 'my_result'
iterations = 20
x = preprocess_img(target_path)
x = x.flatten() # 将图像展平,fmin_l_bfgs_b 只能处理展平的向量
for i in range(iterations):
print('Start of iteration', i)
start_time = time.time()
# 运行L_BFGS算法,将神经风格损失最小化,此处传入自定义类的loss和grads函数
x, min_val, info = fmin_l_bfgs_b(evaluator.loss,
x,
fprime=evaluator.grads,
maxfun=20)
print('Current loss value:', min_val)
# 保存当前图像
img = x.copy().reshape((img_height, img_width, 3))
img = deprocess_img(img)
fname = result_prefix + '_at_iteration_%d.png' % i
cv2.imwrite(fname, img)
print('Image saved as', fname)
end_time = time.time()
print('Iteration %d completed in %ds' % (i, end_time - start_time))
4 从图像潜在空间生成图像
从图像的潜在空间中采样,并创建全新图像或编辑现有图像,这是目前最流行也是最成功的创造性人工智能应用。变分自编码器(VAE,variational autoencoder)和生成式对抗网络(GAN, generative adversarial network)是该领域的主要技术。
图像生成的关键思想就是找到一个低维的表示潜在空间(latent space,也是一个向量空间),其中任意点都可以被映射为一张逼真的图像。 而完成这种映射的就称为解码器或生成器。下图展示了这个过程:
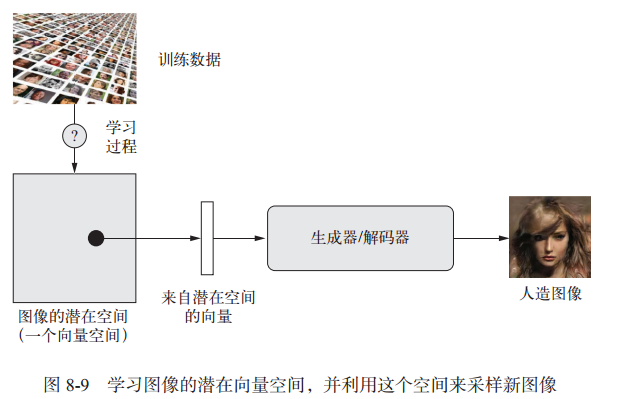
- VAE 非常适合用于学习具有良好结构的潜在空间,其中特定方向表示数据中有意义的变化轴
- GAN 生成的图像可能非常逼真,但它的潜在空间可能没有良好结构和连续性
4.1 变分自编码器 VAE
VAE是一种生成式网络模型,特别适用于利用概念向量进行图像编辑的任务,它将输入编码到低维潜在空间,然后再解码回来。
VAE 不是将输入图像压缩成潜在空间中的固定编码,而是将图像转换为统计分布的参数,即平均值和方差,其工作原理如下:
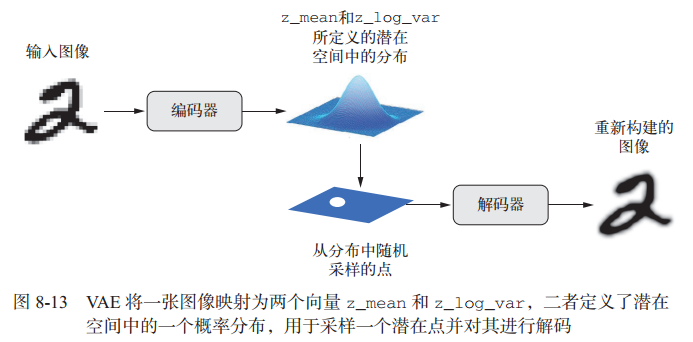
- 一个编码器模块将输入样本 input_img 转换为表示潜在空间中的两个参数 z_mean 和z_log_variance。
- 我们假定潜在正态分布能够生成输入图像,并从这个分布中随机采样一个点 z:
z =z_mean + exp(z_log_variance) * epsilon,其中 epsilon 是取值很小的随机张量。 - 一个解码器模块将潜在空间的这个点映射回原始输入图像。
VAE中有两个损失函数:
- 重构损失(reconstruction loss),它迫使解码后的样本匹配初始输入
- 正则化损失(regularization loss),它有助于学习具有良好结构的潜在空间,并可以降低在训练数据上的过拟合
示例代码:
import keras
import numpy as np
from keras import backend as K
from keras import layers
from keras.datasets import mnist
from keras.models import Model
import matplotlib.pyplot as plt
from scipy.stats import norm
img_shape = (28, 28, 1)
batch_size = 16
latent_dim = 2 # 潜在空间维度:一个二维平面
# VAE编码器
input_img = keras.Input(shape=img_shape)
x = layers.Conv2D(32, 3, padding='same', activation='relu')(input_img)
x = layers.Conv2D(64, 3, padding='same', activation='relu', strides=(2, 2))(x)
x = layers.Conv2D(64, 3, padding='same', activation='relu')(x)
x = layers.Conv2D(64, 3, padding='same', activation='relu')(x)
shape_before_flattening = K.int_shape(x)
x = layers.Flatten()(x)
x = layers.Dense(32, activation='relu')(x)
# 输入图像最终被编码为这两个参数
z_mean = layers.Dense(latent_dim)(x)
z_log_var = layers.Dense(latent_dim)(x)
# 潜在空间采样函数
def sampling(args):
z_mean, z_log_var = args
epsilon = K.random_normal(shape=(K.shape(z_mean)[0], latent_dim),
mean=0.,
stddev=1.)
return z_mean + K.exp(z_log_var) * epsilon
z = layers.Lambda(sampling)([z_mean, z_log_var])
# VAE解码器
decoder_input = layers.Input(K.int_shape(z)[1:]) # Z的输出作为解码器输入
# 对输入进行上采样
x = layers.Dense(np.prod(shape_before_flattening[1:]),
activation='relu')(decoder_input)
# 将输入转换为特征图,使其形状与编码器最后一个Flatten层前形状相同
x = layers.Reshape(shape_before_flattening[1:])(x)
# Conv2DTranspose层和Conv2D层,将输入解码为与原始输入图像相同尺寸的特征图
x = layers.Conv2DTranspose(32,
3,
padding='same',
activation='relu',
strides=(2, 2))(x)
x = layers.Conv2D(1, 3, padding='same', activation='sigmoid')(x)
decoder = Model(decoder_input, x)
z_decoded = decoder(z) # 解码器构建完成,z作为输入
# 编写一个自定义层,并在其内部使用内置的 add_loss 层方法来创建一个你想要的损失
class CustomVariationalLayer(keras.layers.Layer):
def vae_loss(self, x, z_decoded):
x = K.flatten(x)
z_decoded = K.flatten(z_decoded)
xent_loss = keras.metrics.binary_crossentropy(x, z_decoded)
kl_loss = -5e-4 * K.mean(
1 + z_log_var - K.square(z_mean) - K.exp(z_log_var), axis=-1)
return K.mean(xent_loss + kl_loss)
def call(self, inputs): # call方法来调用自定义层
x = inputs[0]
z_decoded = inputs[1]
loss = self.vae_loss(x, z_decoded)
self.add_loss(loss, inputs=inputs)
return x
y = CustomVariationalLayer()([input_img, z_decoded])
# 训练VAE
vae = Model(input_img, y)
vae.compile(optimizer='rmsprop', loss=None) # loss已经包含在自定义层,不用再这里指定
vae.summary()
(x_train, _), (x_test, y_test) = mnist.load_data()
x_train = x_train.astype('float32') / 255.
x_train = x_train.reshape(x_train.shape + (1, ))
x_test = x_test.astype('float32') / 255.
x_test = x_test.reshape(x_test.shape + (1, ))
vae.fit(x=x_train,
y=None,
shuffle=True,
epochs=10,
batch_size=batch_size,
validation_data=(x_test, None))
# 从二维潜在空间采用一组点的网格,解码为图像
n = 15
digit_size = 28
figure = np.zeros((digit_size * n, digit_size * n))
# 使用 SciPy 的 ppf 函数对线性分隔的坐标进行变换,以生成潜在变量 z 的值
grid_x = norm.ppf(np.linspace(0.05, 0.95, n))
grid_y = norm.ppf(np.linspace(0.05, 0.95, n))
for i, yi in enumerate(grid_x):
for j, xi in enumerate(grid_y):
z_sample = np.array([[xi, yi]])
z_sample = np.tile(z_sample, batch_size).reshape(batch_size, 2)
x_decoded = decoder.predict(z_sample, batch_size=batch_size)
digit = x_decoded[0].reshape(digit_size, digit_size)
figure[i * digit_size:(i + 1) * digit_size, j * digit_size:(j + 1) *
digit_size] = digit
plt.figure(figsize=(10, 10))
plt.imshow(figure, cmap='Greys_r')
plt.show()
4.2 生成式对抗网络 GAN
GAN 的工作原理:一个伪造者网络和一个专家网络,二者训练的目的都是为了打败彼此。因此, GAN 由以下两部分组成。
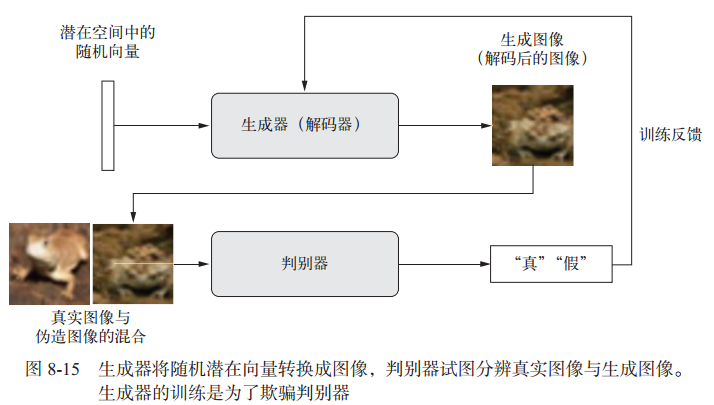
- 生成器网络(generator network):它以一个随机向量(潜在空间中的一个随机点)作为输入,并将其解码为一张合成图像。
- 判别器网络(discriminator network)或对手(adversary):以一张图像(真实的或合成的均可)作为输入,并预测该图像是来自训练集还是由生成器网络创建
GAN是一个动态的系统,其最优化过程寻找的不是一个最小值,而是两股力量之间的平衡。
4.2.1 公认技巧
训练 GAN 和调节 GAN 实现的过程非常困难。你应该记住一些公认的技巧。这些技巧更像是炼金术而不是科学,没有理论支持。
- 使用 tanh 作为生成器最后一层的激活,而不用 sigmoid,后者在其他类型的模型中更加常见。
- 使用正态分布(高斯分布)对潜在空间中的点进行采样,而不用均匀分布。
- 随机性能够提高稳健性。训练 GAN得到的是一个动态平衡,所以 GAN可能以各种方式“卡住”。在训练过程中引入随机性有助于防止出现这种情况。我们通过两种方式引入随机性:一种是在判别器中使用 dropout,另一种是向判别器的标签添加随机噪声。
- 稀疏的梯度会妨碍 GAN 的训练。在深度学习中,稀疏性通常是我们需要的属性,但在GAN 中并非如此。有两件事情可能导致梯度稀疏:最大池化运算和 ReLU 激活。推荐使用步进卷积代替最大池化来进行下采样,还推荐使用 LeakyReLU 层来代替 ReLU 激活。 LeakyReLU 和 ReLU 类似,但它允许较小的负数激活值,从而放宽了稀疏性限制。
- 在生成的图像中,经常会见到棋盘状伪影,这是由生成器中像素空间的不均匀覆盖导致的。为了解决这个问题,每当在生成器和判别器中都使用步进的 Conv2DTranpose或 Conv2D 时,使用的内核大小要能够被步幅大小整除。
4.2.2 如何训练GAN
训练循环的大致流程如下所示。每轮都进行以下操作。
- 从潜在空间中抽取随机的点(随机噪声)。
- 利用这个随机噪声用 generator 生成图像。
- 将生成图像与真实图像混合。
- 使用这些混合后的图像以及相应的标签(真实图像为“真”,生成图像为“假”)来训练discriminator
- 在潜在空间中随机抽取新的点。
- 使用这些随机向量以及全部是“真实图像”的标签来训练 gan。这会更新生成器的权重(只更新生成器的权重,因为判别器在 gan 中被冻结),其更新方向是使得判别器能够将生成图像预测为“真实图像”。这个过程是训练生成器去欺骗判别器。
Note:训练时你可能会看到,对抗损失开始大幅增加,而判别损失则趋向于零,即判别器最终支配了生成器。如果出现了这种情况,你可以尝试减小判别器的学习率,并增大判别器的 dropout 比率。
4.2.3 代码示例
# 生成式对抗网络示例
import os
import keras
import numpy as np
from keras import layers
from keras.preprocessing import image
# GAN的生成器网络:将来自潜在空间的向量转换为一张候选图像
latent_dim = 32
height = 32
width = 32
channels = 3
generator_input = keras.Input(shape=(latent_dim, ))
# 将输入转换为大小为16x16的128个通道的特征图
x = layers.Dense(128 * 16 * 16)(generator_input)
x = layers.LeakyReLU()(x)
x = layers.Reshape((16, 16, 128))(x)
x = layers.Conv2D(256, 5, padding='same')(x)
x = layers.LeakyReLU()(x)
# 上采样为32x32
x = layers.Conv2DTranspose(256, 4, strides=2, padding='same')(x)
x = layers.LeakyReLU()(x)
x = layers.Conv2D(256, 5, padding='same')(x)
x = layers.LeakyReLU()(x)
x = layers.Conv2D(256, 5, padding='same')(x)
x = layers.LeakyReLU()(x)
# 生成一个大小为32x32的单通道特征图
x = layers.Conv2D(channels, 7, activation='tanh', padding='same')(x)
generator = keras.models.Model(generator_input, x) #实例化模型
generator.summary()
# GAN的判别器网络:接受一张候选图像,判断是生成的图像或真是图像
discriminator_input = layers.Input(shape=(height, width, channels))
x = layers.Conv2D(128, 3)(discriminator_input)
x = layers.LeakyReLU()(x)
x = layers.Conv2D(128, 4, strides=2)(x)
x = layers.LeakyReLU()(x)
x = layers.Conv2D(128, 4, strides=2)(x)
x = layers.LeakyReLU()(x)
x = layers.Conv2D(128, 4, strides=2)(x)
x = layers.LeakyReLU()(x)
x = layers.Flatten()(x)
x = layers.Dropout(0.4)(x) # 判别器添加一个dropout层,重要技巧
x = layers.Dense(1, activation='sigmoid')(x) # 分类曾
discriminator = keras.models.Model(discriminator_input, x)
discriminator.summary()
# 优化器使用梯度裁剪,限制梯度值的范围
discriminator_optimizer = keras.optimizers.RMSprop(lr=0.0008,
clipvalue=1.0,
decay=1e-8)
discriminator.compile(optimizer=discriminator_optimizer,
loss='binary_crossentropy')
# 对抗网络:将生成器和判别器连接在一起
# 设置判别器权重为不可训练,不然在训练过程中签字改变,预测结果会始终为真
discriminator.trainable = False
gan_input = keras.Input(shape=(latent_dim, ))
gan_output = discriminator(generator(gan_input)) # 连接生成器和判别器
gan = keras.models.Model(gan_input, gan_output)
gan_optimizer = keras.optimizers.RMSprop(lr=0.0004, clipvalue=1.0, decay=1e-8)
gan.compile(optimizer=gan_optimizer, loss='binary_crossentropy')
# 训练GAN
(x_train, y_train), (_, _) = keras.datasets.cifar10.load_data() # 加载数据
x_train = x_train[y_train.flatten() == 6] # 只选择数据集中的青蛙图像
x_train = x_train.reshape((x_train.shape[0], ) +
(height, width, channels)).astype('float32') / 255.
iterations = 10000
batch_size = 20
save_dir = 'your_dir' # 生成图像保存路径
start = 0
for step in range(iterations):
# 在潜在空间随机采样
random_latent_vectors = np.random.normal(size=(batch_size, latent_dim))
# 随机采样点通过生成器得到虚假图像
generated_images = generator.predict(random_latent_vectors)
stop = start + batch_size
real_images = x_train[start:stop]
# 将虚假图像和真是图像合在一起
combined_images = np.concatenate([generated_images, real_images])
# 合并标签区分真实和虚假图像
labels = np.concatenate(
[np.ones((batch_size, 1)),
np.zeros((batch_size, 1))])
# 想标签添加噪声,重要技巧
labels += 0.05 * np.random.random(labels.shape)
# 合并图像用于训练判别器
d_loss = discriminator.train_on_batch(combined_images, labels)
# 在潜在空间再随机采样一次
random_latent_vectors = np.random.normal(size=(batch_size, latent_dim))
misleading_targets = np.zeros((batch_size, 1)) # 标签设置为全真
# 通过GAN训练生成器
a_loss = gan.train_on_batch(random_latent_vectors, misleading_targets)
start += batch_size
if start > len(x_train) - batch_size:
start = 0
if step % 100 == 0: # 每100步保存并绘图
gan.save_weights('gan.h5') # 保存权重
print('discriminator loss:', d_loss)
print('adversarial loss:', a_loss)
# 保存虚假图像
img = image.array_to_img(generated_images[0] * 255., scale=False)
img.save(os.path.join(save_dir, 'generated_frog' + str(step) + '.png'))
# 保存真实图像
img = image.array_to_img(real_images[0] * 255., scale=False)
img.save(os.path.join(save_dir, 'real_frog' + str(step) + '.png'))

若有收获,就点个赞吧
0 人点赞
