【课程引言】
大队长带领学员学习”变量“及无人机”Tof“功能,本节完成以下实践任务:
1.TT起飞动作:通过抬脚,挥手让TT起飞
2.使用变量统一设置避障适合距离
2.拓展练习:无人机自动避障
【课程目标】
1.了解数据与变量:含义、生活中的变量
2.知道Tof功能
3.了解Tof的应用场景
4.掌握Tof变量积木块的使用
【教学过程】
1、变量的定义,变量的实质是什么?
变量这个概念来源于数学。在数学中,变量表示尚未清楚的值(即变数),或一个可代入的值(见函数)。比如,我们小的时候做应用题,我们求解的时候列方程,经常假设某个量为x。
而在计算机中,变量是一种使用方便的占位符,用于引用计算机内存地址,该地址可以存储程序(脚本)运行时可更改的程序信息。
我们如果把这个概念抽象出来,那么变量的实质是什么?举个例子,一个人一生中可能只用一个名字,但是他每天都在发生着变化,但是无论怎么变化他还是他,不会变成别人。仔细想一想,“变量”这个概念在现实生活中是处处存在。它实质上是一个时刻都可能会改变的东西的代称,而这个变化又有一定的范围,使得无论它怎么变,它还是它。
2、TOF技术
TOF是飞行时间(Time of Flight)技术的缩写,即传感器发出经调制的近红外光,遇物体后反射,传感器通过计算光线发射和反射时间差或相位差,来换算被拍摄景物的距离,以产生深度信息,此外再结合传统的相机拍摄,就能将物体的三维轮廓以不同颜色代表不同距离的地形图方式呈现出来。
3、RoboMaster TT的TOF应用
测距避障,智慧感知,集成ToF 红外测距传感器——集成单点ToF 传感器,最大测量距离可达到 1.2米,适用于多种教学场景的测距应用,可实现环境感知、智能避障等。
【角色练习】自动避障
为避免干扰信号,程序中使用了条件循环,去除干扰信号。
【无人机实践1】挥手起飞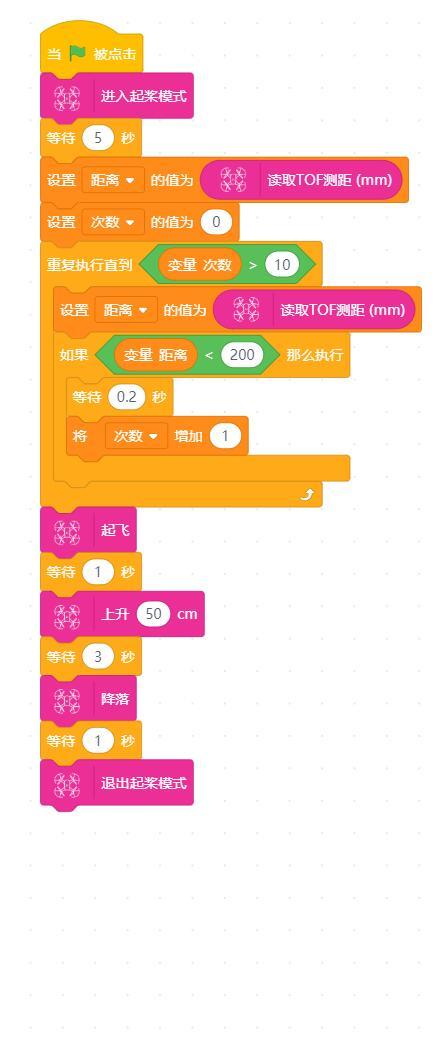
【无人机实践2】自动避障
**

若有收获,就点个赞吧
0 人点赞
