1 等待队列与阻塞IO
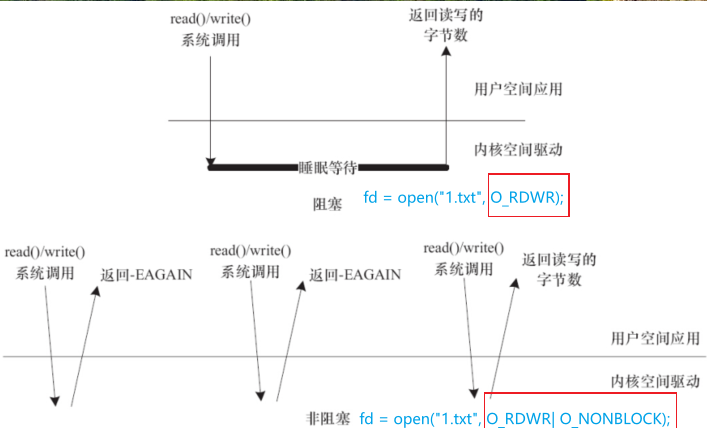
阻塞和非阻塞I/O是访问设备的两种方式,驱动程序应该灵活的支持这两种方式。两者的概念如下:
- 阻塞:当进程无法获得资源时,挂起进程直到所需的条件满足之后再进行操作
- 非阻塞:当进程无法获得资源时,要么放弃,要么不停的查询,直到条件满足
在Linux驱动程序中,可以使用等待队列(Wait Queue)来记录挂起的进程并实现阻塞进程的唤醒。
1.1 等待队列相关函数
linux内核提供了如下关于等待队列的操作,头文件#include <linux/wait.h>:
//1 定义等待队列headwait_queue_head_t my_queue;//2 初始化headinit_waitqueue_head(&my_queue);//3 定义并初始化一个名为name的元素DECLARE_WAITQUEUE(name, tsk);//4 添加、移除等待队列void add_wait_queue(wait_queue_head_t *q, wait_queue_t *wait);void remove_wait_queue(wait_queue_head_t *q, wait_queue_t *wait);//5 等待条件,条件满足后队列头部进程被唤醒wait_event(queue, condition); //不能被中断打断wait_event_interruptible(queue, condition); //可以被中断打断wait_event_timeout(queue, condition, timeout);wait_event_interruptible_timeout(queue, condition, timeout);//6 唤醒队列所有进程void wake_up(wait_queue_head_t *queue);void wake_up_interruptible(wait_queue_head_t *queue);//7 挂起所有进程void sleep_on(wait_queue_head_t *q );void interruptible_sleep_on(wait_queue_head_t *q );
1.2 在驱动中如何使用
我们用等待队列为第五节的字符驱动添加了阻塞挂起的功能。
- 读进程会在有数据的时候才读取数据,没有数据的时候一直循环,也允许其他进程挂起读进程
- 写进程在数据内存有空闲的时候写入数据,数据内存满的时候一直循环等待,也允许其他进程观其写进程
```c
//在驱动6互斥量globalmem的基础上,把驱动中的mem内存变成FIFO
//只有FIFNO有数据时,读进程才能把数据读出来并清空
//只有FIFO不满时,写进程才能写入数据
include
include
include
include
include
include
include
include
include
//定义宏
define GLOBALFIFO_SIZE 0X1000
define globalfifo_MAGIC ‘g’
define MEM_CLEAR _IO(globalfifo_MAGIC,0)
define globalfifo_MAJOR 231 //默认主设备号
//添加模块参数,主设备号 static int globalfifo_major = globalfifo_MAJOR; module_param(globalfifo_major, int, S_IRUGO);
//定义字符驱动结构体 struct globalfifo_dev { struct cdev cdev;//系统字符设备结构体 unsigned char mem[GLOBALFIFO_SIZE];//模拟设备占用的内存 struct mutex mutex; //增加互斥量 //添加阻塞队列 wait_queue_head_t r_wait; //读队列 wait_queue_head_t w_wait; //写队列 unsigned int current_len; //当前mem中数据长度 }; struct globalfifo_dev* globalfifo_devp;//指针,指向申请的设备空间
//file_operation成员函数 static int globalfifo_open(struct inode inode, struct file filp) { filp->private_data = globalfifo_devp; return 0; } static int globalfifo_release(struct inode inode, struct file filp) { return 0;//释放文件,没什么特殊操作 } static ssize_t globalfifo_read(struct file filp, char __user buf, size_t size, loff_t ppos) { int ret = 0; unsigned int count = size; //文件的私有数据一般指向设备结构体,在open函数中设置 struct globalfifo_dev dev = filp->private_data; //声明一个阻塞队列元素 DECLARE_WAITQUEUE(wait, current);
//获取互斥量mutex_lock(&(dev->mutex));//添加元素到读队列add_wait_queue(&(dev->r_wait), &wait);while(dev->current_len == 0)//等待有数据可读{if (filp->f_flags & O_NONBLOCK){ret = -EAGAIN;//非阻塞模式,直接返回,不循环等待goto out;}//如果没有数据可读,则挂起读进程__set_current_state(TASK_INTERRUPTIBLE);//标记进程浅度睡眠,可抢占mutex_unlock(&(dev->mutex));//释放互斥量schedule();if (signal_pending(current)){ret = -ERESTARTSYS;goto out2;}mutex_lock(&(dev->mutex));}if (count > dev->current_len)count = dev->current_len;if (copy_to_user(buf, dev->mem, count))//复制内容到用户空间{ret = -EFAULT;goto out;}else{memcpy(dev->mem, dev->mem + count, dev->current_len - count);dev->current_len -= count;printk(KERN_INFO"read %u bytes, current_len:%d\n", count, dev->current_len);wake_up_interruptible(&(dev->w_wait));//读出了数据,可能有数据要写,唤醒写进程队列ret = count;}
out: mutex_unlock(&(dev->mutex)); out2: remove_wait_queue(&(dev->r_wait), &wait); set_current_state(TASK_RUNNING);
return ret;
} static ssize_t globalfifo_write(struct file filp, const char __user buf, size_t size, loff_t ppos) { unsigned int count = size; int ret = 0; struct globalfifo_dev dev = filp->private_data; //声明一个阻塞队列元素 DECLARE_WAITQUEUE(wait, current);
//获取互斥量mutex_lock(&(dev->mutex));add_wait_queue(&(dev->w_wait), &wait);while (dev->current_len == GLOBALFIFO_SIZE){if (filp->f_flags & O_NONBLOCK){ret = -EAGAIN;goto out;}//如果数据区时满的,则挂起写进程__set_current_state(TASK_INTERRUPTIBLE);mutex_unlock(&(dev->mutex));schedule();if (signal_pending(current)){ret = -ERESTARTSYS;goto out2;}mutex_lock(&(dev->mutex));}if (count > (GLOBALFIFO_SIZE - dev->current_len))count = GLOBALFIFO_SIZE - dev->current_len;if (copy_from_user(dev->mem + dev->current_len, buf, count))//从用户空间复制内容{ret = -EFAULT;goto out;}else{dev->current_len += count;ret = count;printk(KERN_INFO"write %u bytes, current_len:%d\n", count, dev->current_len);wake_up_interruptible(&(dev->r_wait));ret = count;}
out: mutex_unlock(&(dev->mutex)); out2: remove_wait_queue(&(dev->w_wait), &wait); set_current_state(TASK_RUNNING);
return ret;
} static loff_t globalfifo_llseek(struct file* filp, loff_t offset, int orig) { loff_t ret = 0;
switch(orig){case 0://从文件开头seekif (offset < 0 || (unsigned int)offset > GLOBALFIFO_SIZE){ret = -EINVAL;break;}filp->f_pos = (unsigned int)offset;//设置文件对象新位置ret = filp->f_pos;break;case 1://从文件当前位置seekif ((filp->f_pos + offset) > GLOBALFIFO_SIZE || (filp->f_pos + offset) < 0){ret = -EINVAL;break;}filp->f_pos += (unsigned int)offset;//设置文件对象新位置ret = filp->f_pos;break;default:ret = -EINVAL;break;}return ret;
} static long globalfifo_ioctl(struct file filp, unsigned int cmd, unsigned long arg) { struct globalfifo_dev dev = filp->private_data;
switch(cmd){case MEM_CLEAR: //本示例里我们只支持clear命令//获取互斥量mutex_lock(&(dev->mutex));memset(dev->mem, 0, GLOBALFIFO_SIZE);//释放互斥量mutex_unlock(&(dev->mutex));printk(KERN_INFO"globalfifo is set to zero\n");break;default:return -EINVAL;}return 0;
} //定义文件操作结构体 static const struct file_operations globalfifo_fops = { .owner = THIS_MODULE, .llseek = globalfifo_llseek, .read = globalfifo_read, .write = globalfifo_write, .unlocked_ioctl = globalfifo_ioctl, .open = globalfifo_open, .release = globalfifo_release };
//驱动模块加载函数 static void globalfifo_setup_cdev(struct globalfifo_dev* dev, int index) { int err, devno = MKDEV(globalfifo_major, index); //获得dev_t对象 cdev_init(&dev->cdev, &globalfifo_fops);//初始化设备 dev->cdev.owner = THIS_MODULE; //注册设备 err = cdev_add(&dev->cdev, devno, 1); if (err) { printk(KERN_NOTICE”Error %d adding globalfifo %d”, err, index); } } static int __init globalfifo_init(void) { int ret; dev_t devno = MKDEV(globalfifo_major, 0); //申请设备号 if (globalfifo_major) { ret = register_chrdev_region(devno, 1, “globalfifo”); } else { ret = alloc_chrdev_region(&devno, 0, 1, “globalfifo”); globalfifo_major = MAJOR(devno); }
if (ret < 0)return ret;globalfifo_devp = kzalloc(sizeof(struct globalfifo_dev), GFP_KERNEL);if (!globalfifo_devp){//空间申请失败ret = -ENOMEM;goto fail_malloc;}globalfifo_setup_cdev(globalfifo_devp, 0);//初始化互斥量mutex_init(&(globalfifo_devp->mutex));//初始化阻塞队列init_waitqueue_head(&(globalfifo_devp->r_wait));init_waitqueue_head(&(globalfifo_devp->w_wait));return 0;
fail_malloc: unregister_chrdev_region(devno, 1); return ret; } module_init(globalfifo_init);
//驱动模块卸载函数 static void __exit globalfifo_exit(void) { cdev_del(&globalfifo_devp->cdev);//注销设备 kfree(globalfifo_devp); unregister_chrdev_region(MKDEV(globalfifo_major, 0), 1);//释放设备号 } module_exit(globalfifo_exit);
//模块声明 MODULE_AUTHOR(“BARRET REN barret.ren@outlook.com“); MODULE_LICENSE(“GPL v2”); MODULE_DESCRIPTION(“A driver for virtual globalfifo charactor device”); MODULE_ALIAS(“globalfifo device driver”);
上面代码作为模块加载后内核后,运行结果如下:```bash# 加载模块后,可以看到已经加载231的设备$ cat /proc/devicesCharacter devices:1 mem4 /dev/vc/0...226 drm231 globalfifo241 hidraw242 aux# 创建设备号位231,0的设备$ sudo mknod /dev/globalfifo c 231 0$ sudo chmod 666 /dev/globalfifo# 打开一个shell,一直运行cat命令,会一直等待$ cat /dev/globalfifo# 写入数据后,cat命令会自动输出数据$ echo "hello world" > /dev/globalfifo
2 轮询与非阻塞IO
使用非阻塞I/O的应用程序通常会使用select和poll()系统调用查询是否可对设备进行无阻塞的访问。select()和poll()系统调用最终会使设备驱动中file_operations的poll()函数被执行。
2.1 App层如何实现轮询
Linux系统调用提供了select()、poll()、epoll()三种轮询方法。一般来说:
- 当涉及的fd数量较少的时候,使用select和poll是合适的
- 如果涉及的fd很多,如在大规模并发的服务器中侦听许多socket的时候,适合选用epoll
三个函数的定义如下:
4 网络IO模型
2.2 驱动如何支持轮询
在驱动中,需要实现file_operations文件操作中的poll函数:__poll_t (*poll) (struct file *, struct poll_table_struct *);
第1个参数为file结构体指针,第2个参数为轮询表指针。这个函数应该进行两项工作:
对可能引起设备文件状态变化的等待队列调用poll_wait()函数,将对应的等待队列头部添加到poll_table中
- poll_wait()函数所做的工作是把当前进程添加到wait参数指定的等待列表(poll_table)中,实际作用是让唤醒参数queue对应的等待队列可以唤醒因select/poll/epoll而睡眠的进程。poll_wait函数定义为
#include <linux/poll.h>static inline void poll_wait(struct file * filp, wait_queue_head_t * wait_address, poll_table *p);
- poll_wait()函数所做的工作是把当前进程添加到wait参数指定的等待列表(poll_table)中,实际作用是让唤醒参数queue对应的等待队列可以唤醒因select/poll/epoll而睡眠的进程。poll_wait函数定义为
返回设备资源的可获取状态,即POLLIN、POLLOUT、POLLPRI、POLLERR、POLLNVAL等宏的位“或”结果,每个宏的含义都表明设备的一种状态
poll的实现模板如下:
static unsigned int xxx_poll(struct file *filp, poll_table *wait){unsigned int mask = 0;struct xxx_dev *dev = filp->private_data; /* 获得设备结构体指针 *///...poll_wait(filp, &dev->r_wait, wait); /* 加入读等待队列 */poll_wait(filp, &dev->w_wait, wait); /* 加入写等待队列 */if (...) /* 可读 */mask |= POLLIN | POLLRDNORM; /* 标示数据可获得(对用户可读) */if (...) /* 可写 */mask |= POLLOUT | POLLWRNORM; /* 标示数据可写入 *///...return mask;}
2.3 驱动中实现poll示例
static unsigned int globalfifo_poll(struct file* filp, poll_table* wait){unsigned int mask = 0;struct globalfifo_dev* dev = filp->private_data;mutex_lock(&(dev->mutex));//获取互斥量//将设备中的读写队列加入到poll_table中,这样设备读写进程可以唤醒select中的进程poll_wait(filp, &(dev->r_wait), wait);poll_wait(filp, &(dev->w_wait), wait);if (dev->current_len != 0)mask |= POLLIN | POLLRDNORM; //有数据,返回可读状态if (dev->current_len != GLOBALFIFO_SIZE)mask |= POLLOUT | POLLWRNORM; //数据区未满,返回可写状态mutex_unlock(&(dev->mutex));return mask;}
我们可以写一个select的应用程序,轮询我们自定义的驱动设备是否可读可写:
//使用select测试一下编写的poll_golbalfifo驱动的poll函数是否OK#include <stdio.h>#include <sys/select.h>#include <sys/types.h>#include <sys/stat.h>#include <fcntl.h>#include <sys/ioctl.h>#define FIFO_CLEAR 0x1#define BUFFER_LEN 20void main(void){int fd, num;char rd_ch[BUFFER_LEN];fd_set rfds, wfds; /* 读 / 写文件描述符集 *//* 以非阻塞方式打开 /dev/globalfifo 设备文件 */fd = open("/dev/globalfifo", O_RDONLY | O_NONBLOCK);if (fd != -1){/* FIFO 清 0 */if (ioctl(fd, FIFO_CLEAR, 0) < 0)printf("ioctl command failed\n");while (1){FD_ZERO(&rfds);FD_ZERO(&wfds);FD_SET(fd, &rfds);FD_SET(fd, &wfds);select(fd + 1, &rfds, &wfds, NULL, NULL);/* 数据可获得 */if (FD_ISSET(fd, &rfds))printf("Poll monitor:can be read\n");/* 数据可写入 */if (FD_ISSET(fd, &wfds))printf("Poll monitor:can be written\n");}}else{printf("Device open failure\n");}}
当驱动模块被加载后,运行测试程序,会不断输出Poll monitor:can be written;当写入一些数据后,会打印Poll monitor:can be written和Poll monitor:can be read;当数据写满时,只打印Poll monitor:can be read。
3 信号与异步通知
异步通知的意思是:一旦设备就绪,主动通知App,这样就不需要使用阻塞和非阻塞方式一直查询设备状态了(类似于硬件的中断)。三者的区别如下:
3.1 信号类型
异步通知使用Linux信号来实现,Linux支持的信号可以查看:
Unix系统信号含义
设置信号对应的处理函数,两种方式:
void (*signal(int signum, void (*handler))(int)))(int);,handler可以有三种配置:- SIG_IGN:忽略该信号
- SIG_DFL:系统默认处理行为
- 自定义函数:自定义处理
int sigaction(int signum,const struct sigaction *act,struct sigaction *oldact));,
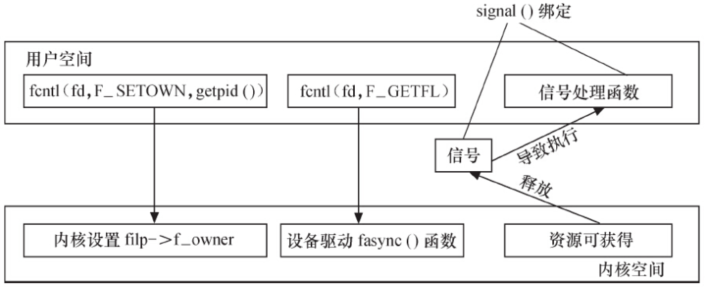
- 通过F_SETOWN控制命令设置设备文件的拥有者为本进程, 这样从设备驱动发出的信号才能被本进程接收到
- 通过F_SETFL控制命令设置设备文件以支持FASYNC,即异步通知模式
- 通过signal()函数连接信号和信号处理函数
应用层处理信号举例如下:
//测试字符驱动的异步通知功能,接受SIGIO信号处理#include <stdio.h>#include <signal.h>#include <sys/types.h>#include <sys/stat.h>#include <fcntl.h>#include <unistd.h>void signal_handler(int signo){printf("release a ginal from globalfifo, signum:%d\n", signo);}int main(){int fd,flags;fd = open("/dev/globalfifo", O_RDWR, S_IRUSR | S_IWUSR);if (fd != -1){//注册信号处理函数signal(SIGIO, signal_handler);//设置本进程为fd的拥有者,这样内核才能把信号发到此进程fcntl(fd, F_SETOWN, getpid());flags = fcntl(fd, F_GETFL);//获取设备当前配置fcntl(fd, F_SETFL, flags | FASYNC);//添加异步配置while(1)sleep(100);}elseprintf("open device failed\n");return 0;}
3.3 驱动如何发出信号
为了使设备支持异步通知机制,驱动程序中涉及3项工作:
- 支持F_SETOWN命令,能在这个控制命令处理中设置filp->f_owner为对应进程ID。不过此项工作已由内核完成, 设备驱动无须处理
- 支持F_SETFL命令的处理,每当FASYNC标志改变时,驱动程序中的fasync()函数将得以执行。驱动中应该实现fasync()函数
int (*fasync) (int, struct file *, int);
在设备资源可获得时, 调用kill_fasync()函数激发相应的信号(
) void kill_fasync(struct fasync_struct **fp, int sig, int band)
驱动的三个工作和App层是相互对应的,关系如下:
举例:继续在globalfifo中添加异步通信: ```c //设备结构体添加异步结构体 struct globalfifo_dev { struct cdev cdev;//系统字符设备结构体 unsigned char mem[GLOBALFIFO_SIZE];//模拟设备占用的内存 struct mutex mutex; //增加互斥量 //添加阻塞队列 wait_queue_head_t r_wait; //读队列 wait_queue_head_t w_wait; //写队列 unsigned int current_len; //当前mem中数据长度 struct fasync_struct* async_queue;//异步结构体指针 };
//添加file_operations的fasync函数: static int globalfifo_fasync(int fd, struct file filp, int mode) { struct globalfifo_dev dev = filp->private_data; return fasync_helper(fd, filp, mode, &(dev->async_queue)); } //添加到file_operations中:
//释放设备时,要把文件描述符从异步通知列表中移除 static int globalfifo_release(struct inode inode, struct file filp) { globalfifo_fasync(-1, filp, 0);//将文件filp从异步通知列表删除 return 0;//释放文件,没什么特殊操作 } //在需要的地方发送信号到应用层 if (dev->async_queue) { printk(KERN_DEBUG”driver send SIGIO\n”); kill_fasync(&(dev->async_queue), SIGIO, POLL_IN); }
<a name="XbViR"></a># 4 异步IO应用程序发起I/O动作后,直接开始执行,并不等待I/O结束,它要么过一段时间来查询之前的I/O请求完成情况,要么I/O请求完成了会自动被调用与I/O完成绑定的回调函数。<br />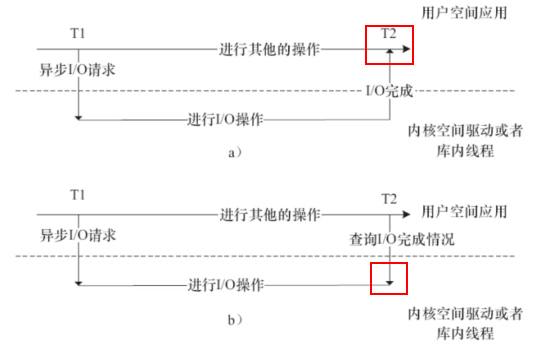<br />可以使用下面的两种AIO函数在用户态实现异步IO操作<a name="nUV8N"></a>## 4.1 glibc的AIO函数[4 网络IO模型](https://www.yuque.com/barret/giv6pv/sez027?view=doc_embed&inner=ib7mU)<a name="RXghw"></a>## 4.2 内核AIO函数内核AIO提供了如下的函数:```cint io_setup(int maxevents, io_context_t *ctxp);int io_destroy(io_context_t ctx);int io_submit(io_context_t ctx, long nr, struct iocb *ios[]);//下发读写请求int io_cancel(io_context_t ctx, struct iocb *iocb, struct io_event *evt);int io_getevents(io_context_t ctx_id, long min_nr, long nr, struct io_event *events, struct timespec *timeout);void io_set_callback(struct iocb *iocb, io_callback_t cb);//等待IO完成事件void io_prep_pwrite(struct iocb *iocb, int fd, void *buf, size_t count, long long offset);//AIO完成时的回调函数void io_prep_pread(struct iocb *iocb, int fd, void *buf, size_t count, long long offset);void io_prep_pwritev(struct iocb *iocb, int fd, const struct iovec *iov, int iovcnt, long long offset);void io_prep_preadv(struct iocb *iocb, int fd, const struct iovec *iov, int iovcnt, long long offset);
AIO一般由内核空间的通用代码处理,对于块设备和网络设备而言,一般在Linux核心层的代码已经解决。字符设备驱动一般不需要实现AIO支持。

若有收获,就点个赞吧
0 人点赞
