共享数据
为了更清楚地说明这一点,就需要考虑共享数据的同步问题,因为数据竞争很容易在共享数据上发生。如果并发地对数据进行非同步读写访问,则会产生未定义行为。
验证并发、未同步的读写操作的最简单方法,就是向std::cout写入一些内容。
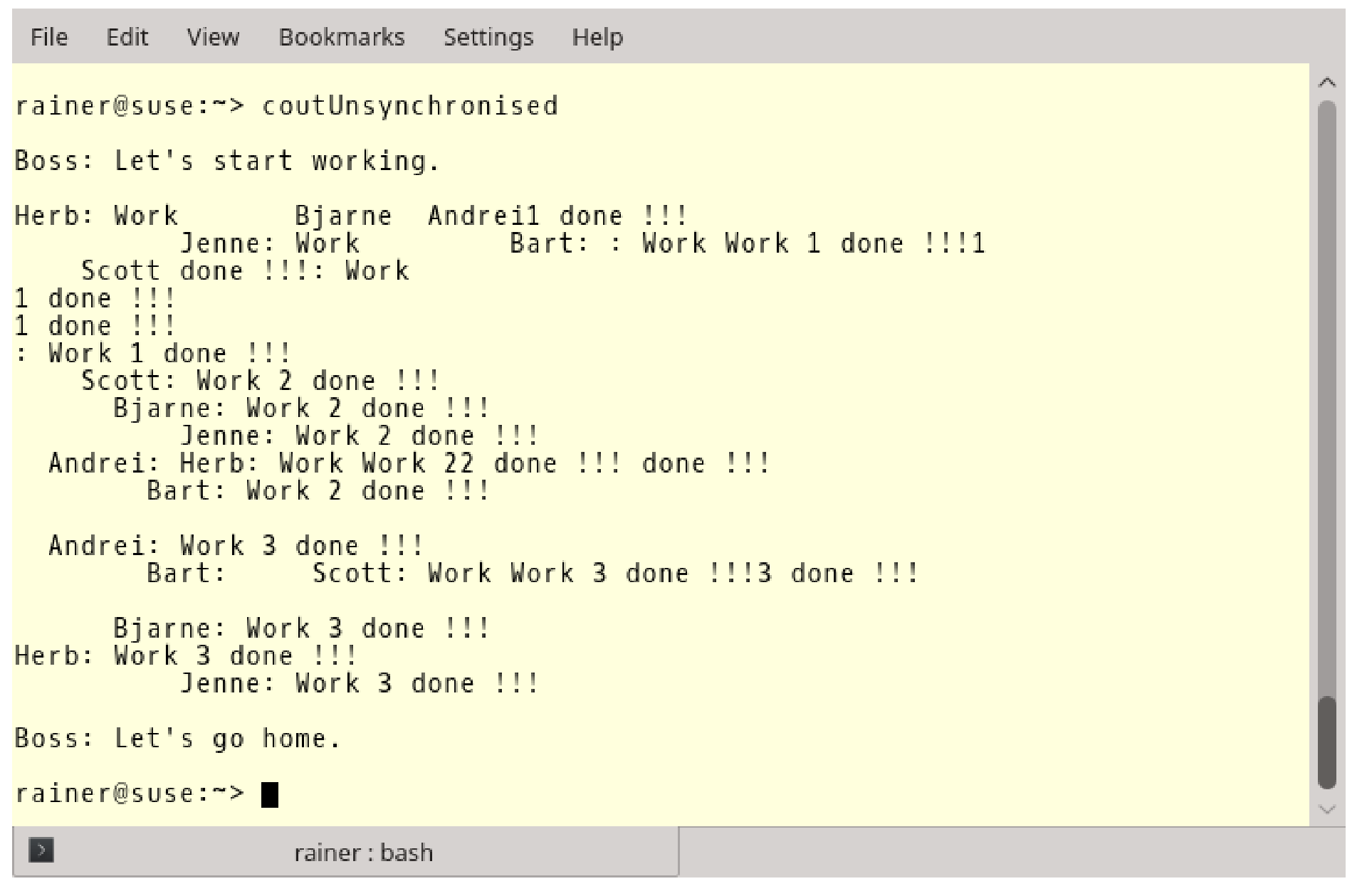
让我们来看一下,使用不同步的方式进行std::cout打印输出。
// coutUnsynchronised.cpp#include <chrono>#include <iostream>#include <thread>class Worker {public:Worker(std::string n) :name(n) {}void operator()() {for (int i = 1; i <= 3; ++i) {// begin workstd::this_thread::sleep_for(std::chrono::microseconds(200));// end workstd::cout << name << ": " << "Work " << i << " done !!!" << std::endl;}}private:std::string name;};int main() {std::cout << std::endl;std::cout << "Boss: Let's start working.\n\n";std::thread herb = std::thread(Worker("Herb"));std::thread andrei = std::thread(Worker(" Andrei"));std::thread scott = std::thread(Worker(" Scott"));std::thread bjarne = std::thread(Worker(" Bjarne"));std::thread bart = std::thread(Worker(" Bart"));std::thread jenne = std::thread(Worker(" Jenne"));herb.join();andrei.join();scott.join();bjarne.join();bart.join();jenne.join();std::cout << "\n" << "Boss: Let's go home." << std::endl;std::cout << std::endl;}
该程序描述了一个工作流程:老板有六个员工(第29 - 34行),每个员工必须处理3个工作包,处理每个工作包需要200毫秒(第13行)。当员工完成了他的所有工作包时,他向老板报告(第15行)。当老板收到所有员工的报告,老板就会把员工们送回家(第43行)。
这么简单的工作流程,输出却如此混乱。
让输出变清晰的最简单解决方法,就是使用互斥量。
互斥量
Mutex是互斥(mutual exclusion)的意思,它确保在任何时候只有一个线程可以访问临界区。
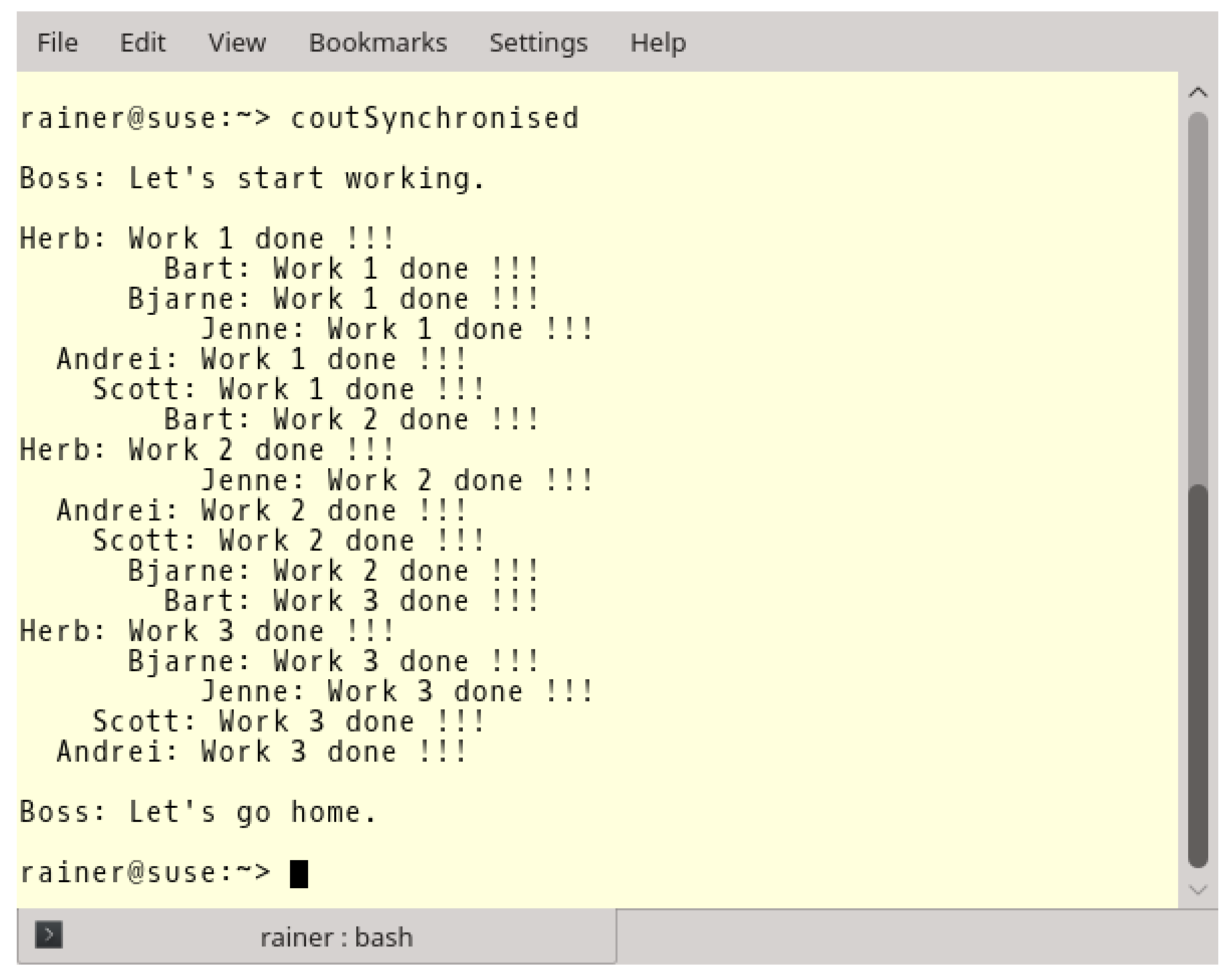
通过使用互斥量,工作流程的混乱变的和谐许多。
// coutSynchronised.cpp#include <chrono>#include <iostream>#include <mutex>#include <thread>std::mutex coutMutex;class Worker {public:Worker(std::string n) :name(n) {}void operator()() {for (int i = 1; i <= 3; ++i) {// begin workstd::this_thread::sleep_for(std::chrono::microseconds(200));// end workcoutMutex.lock();std::cout << name << ": " << "Work " << i << " done !!!" << std::endl;coutMutex.unlock();}}private:std::string name;};int main() {std::cout << std::endl;std::cout << "Boss: Let's start working.\n\n";std::thread herb = std::thread(Worker("Herb"));std::thread andrei = std::thread(Worker(" Andrei"));std::thread scott = std::thread(Worker(" Scott"));std::thread bjarne = std::thread(Worker(" Bjarne"));std::thread bart = std::thread(Worker(" Bart"));std::thread jenne = std::thread(Worker(" Jenne"));herb.join();andrei.join();scott.join();bjarne.join();bart.join();jenne.join();std::cout << "\n" << "Boss: Let's go home." << std::endl;std::cout << std::endl;}
第8行中coutMutex保护了std::cout,第19行中的lock()和第21行中的unlock()调用,确保工作人员不会同时进行报告。
std:: cout是线程安全的
C++11标准中,
std::cout不需要额外的保护,每个字符都是原子式书写的。可能会有更多类似示例中的输出语句交织在一起的情况,但这些只是视觉问题,而程序则是定义良好的。所有全局流对象都是线程安全的,并且插入和提取全局流对象(std::cout、std::cin、std::cerr和std::clog)也都是线程安全的。更正式地说:写入
std::cout并不是数据竞争,而是一个竞争条件。这意味着输出内容的情况,完全取决于交错运行的线程。
C++11有4个不同的互斥量,可以递归地、暂时地锁定,并且不受时间限制。
| 成员函数 | mutex | recursive_mutex | timed_mutex | recursive_timed_mutex |
|---|---|---|---|---|
| m.lock | yes | yes | yes | yes |
| m.try_lock | yes | yes | yes | yes |
| m.try_lock_for | yes | yes | ||
| m.try_lock_until | yes | yes | ||
| m.unlock | yes | yes | yes | yes |
递归互斥量允许同一个线程多次锁定互斥锁。互斥量保持锁定状态,直到解锁次数与锁定次数相等。可以锁定互斥量的最大次数默认并未指定,当达到最大值时,会抛出std::system_error异常。
C++14中有std::shared_timed_mutex,C++17中有std::shared_mutex。std::shared_mutex和std::shared_timed_mutex非常相似,使用的锁可以是互斥或共享的。另外,使用std::shared_timed_mutex可以指定时间点或时间段进行锁定。
| 成员函数 | shared_timed_mutex | shared_mutex |
|---|---|---|
| m.lock | yes | yes |
| m.try_lock | yes | yes |
| m.try_lock_for | yes | |
| m.try_lock_until | yes | |
| m.unlock | yes | yes |
| m.lock_shared | yes | yes |
| m.try_lock_shared | yes | yes |
| m.try_lock_shared_for | yes | |
| m.try_lock_shared_until | yes | |
| m.unlock_shared | yes | yes |
std::shared_timed_mutex(std::shared_mutex)可以用来实现读写锁,也就可以使用std::shared_timed_mutex(std::shared_mutex)进行独占或共享锁定。如果将std::shared_timed_mutex(std::shared_mutex)放入std::lock_guard或std::unique_lock中,就可实现独占锁;如果将std::shared_timed_mutex(std::shared_lock)放入std::shared_lock中,就可实现共享锁。m.try_lock_for(relTime)和m.try_lock_shared_for(relTime)需要一个时间段;m.try_lock_until(absTime)和m.try_lock_shared_until(absTime)需要一个绝对的时间点。
m.try_lock(m.try_lock_shared)尝试锁定互斥量并立即返回。成功时,它返回true,否则返回false。相比之下,m.try_lock_for(m.try_lock_shared_for)和m.try_lock_until(m.try_lock_shared_until)也会尝试上锁,直到超时或完成锁定,这里应该使用稳定时钟来限制时间(稳定的时钟是不能调整的)。
不应该直接使用互斥量,应该将互斥量放入锁中,下面解释下原因。
互斥量的问题
互斥量的问题可以归结为一个:死锁。
死锁
两个或两个以上的个线程处于阻塞状态,并且每个线程在释放之前都要等待其他线程的释放。
结果就是程序完全静止。试图获取资源的线程,通常会永久的阻塞程序。形成这种困局很简单,有兴趣了解一下吗?
异常和未知代码
下面的代码段有很多问题。
std::mutex m;m.lock();sharedVariable = getVar();m.unlock();
问题如下:
- 如果函数
getVar()抛出异常,则互斥量m不会被释放。 - 永远不要在持有锁的时候调用函数。因为
m不是递归互斥量,如果函数getVar试图锁定互斥量m,则程序具有未定义的行为。大多数情况下,未定义行为会导致死锁。 - 避免在持有锁时调用函数。可能这个函数来自一个库,但当这个函数发生改变,就有陷入僵局的可能。
程序需要的锁越多,程序的风险就越高(非线性)。
不同顺序锁定的互斥锁
下面是一个典型的死锁场景,死锁是按不同顺序进行锁定的。
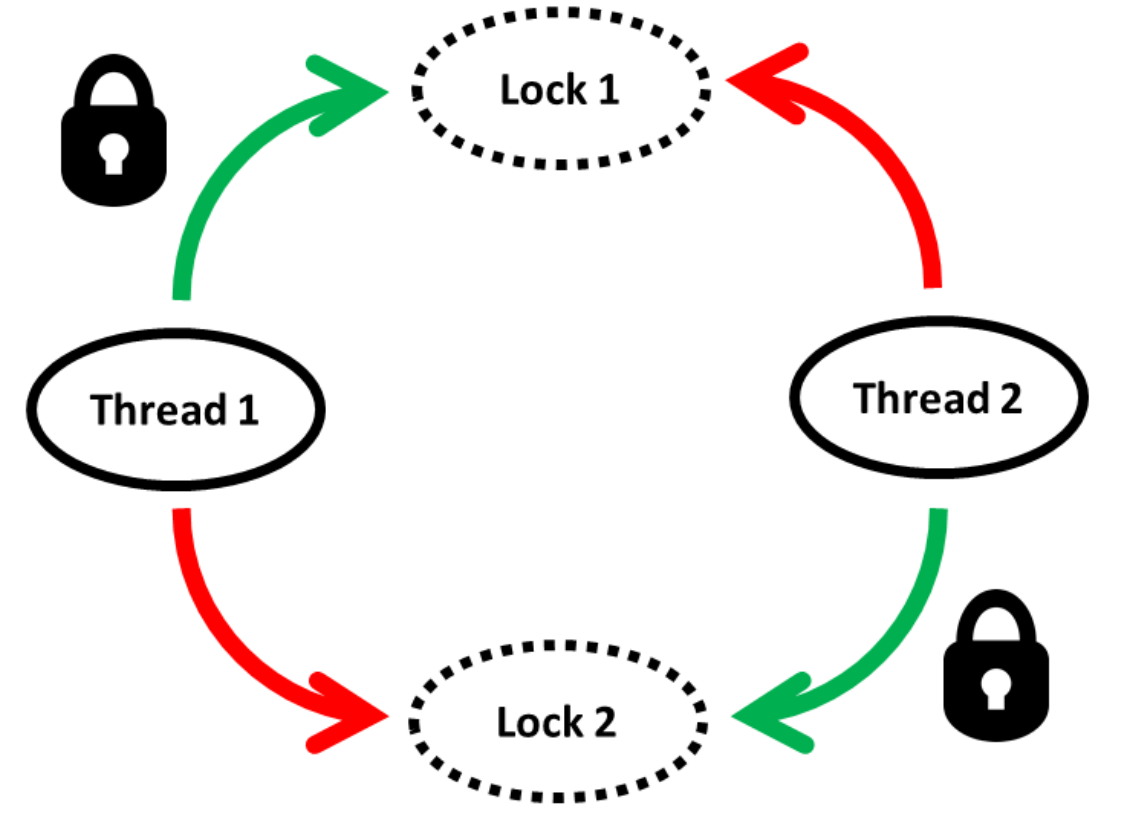
线程1和线程2需要访问两个资源来完成它们的工作。当资源被两个单独的互斥体保护,并且以不同的顺序被请求(线程1:锁1,锁2;线程2:锁2,锁1)时,线程交错执行,线程1得到互斥锁1,然后线程2得到互斥锁2,从而程序进入停滞状态。每个线程都想获得另一个互斥锁,但需要另一个线程释放其需要的互斥锁。“死亡拥抱”这个形容,很好地描述了这种状态。
将这上图转换成代码。
// deadlock.cpp#include <iostream>#include <chrono>#include <mutex>#include <thread>struct CriticalData {std::mutex mut;};void deadLock(CriticalData& a, CriticalData& b) {a.mut.lock();std::cout << "get the first mutex" << std::endl;std::this_thread::sleep_for(std::chrono::microseconds(1));b.mut.lock();std::cout << "get the second mutext" << std::endl;// do something with a and ba.mut.unlock();b.mut.unlock();}int main() {CriticalData c1;CriticalData c2;std::thread t1([&] {deadLock(c1, c2); });std::thread t2([&] {deadLock(c2, c1); });t1.join();t2.join();}
线程t1和t2调用死锁函数(第12 - 23行),向函数传入了c1和c2(第27行和第28行)。由于需要保护c1和c2不受共享访问的影响,它们在内部各持有一个互斥量(为了保持本例简短,关键数据除了互斥量外没有其他函数或成员)。
第16行中,约1毫秒的短睡眠就足以产生死锁。
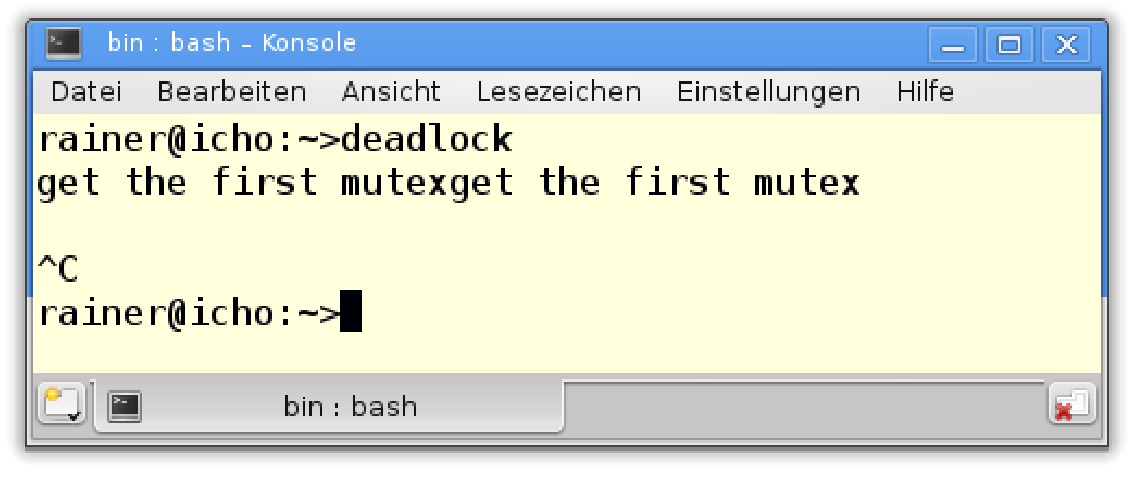
这时,只能按CTRL+C终止进程。
互斥量不能解决所有问题,但在很多情况下,锁可以帮助我们解决这些问题。
锁
锁使用RAII方式处理它们的资源。锁在构造函数中自动绑定互斥量,并在析构函数中释放互斥量,这大大降低了死锁的风险。
锁有四种不同的形式:std::lock_guard用于简单程序,std::unique_lock用于高级程序。从C++14开始就可以用std::shared_lock来实现读写锁了。C++17中,添加了std::scoped_lock,它可以在原子操作中锁定更多的互斥对象。
首先,来看简单程序。
std::lock_guard
std::mutex m;m.lock();sharedVariable = getVar();m.unlock();
互斥量m可以确保对sharedVariable = getVar()的访问是有序的。有序指的是,每个线程按照某种顺序,依次访问临界区。代码很简单,但是容易出现死锁。如果临界区抛出异常或者忘记解锁互斥量,就会出现死锁。使用std::lock_guard,可以很优雅的解决问题:
{std::mutex m,std::lock_guard<std::mutex> lockGuard(m);sharedVariable = getVar();}
代码很简单,但是前后的花括号是什么呢?std::lock_guard的生存周期受其作用域的限制,作用域由花括号构成。生命周期在达到右花括号时结束,std::lock_guard析构函数被调用,并且互斥量被释放。这都是自动发生的,如果sharedVariable = getVar()中的getVar()抛出异常,释放过程也会自动发生。函数作用域和循环作用域,也会限制实例对象的生命周期。
std::scoped_lock
C++17中,添加了std::scoped_lock。与std::lock_guard非常相似,但可以原子地锁定任意数量的互斥对象。
- 如果
std::scoped_lock调用一个互斥量,它的行为就类似于std::lock_guard,并锁定互斥量m:m.lock。如果std::scoped_lock被多个互斥对象调用std::scoped_lock(mutextypes&…),则使用std::lock(m…)函数进行锁定操作。 - 如果当前线程已经拥有了互斥量,但这个互斥量不可递归,那么这个行为就是未定义的,很有可能出现死锁。
- 只需要获得互斥量的所有权,而不需要锁定它们。这种情况下,必须将标志
std::adopt_lock_t提供给构造函数:std::scoped_lock(std::adopt_lock_t, mutextypes&…m)。
使用std::scoped_lock,可以优雅地解决之前的死锁问题。下一节中,将讨论如何杜绝死锁。
std::unique_lock
std::unique_lock比std::lock_guard更强大,也更重量级。
除了包含std::lock_guard提供的功能之外,std::unique_lock还允许:
- 创建无需互斥量的锁
- 不锁定互斥量的情况下创建锁
- 显式地/重复地设置或释放关联的互斥锁量
- 递归锁定互斥量
- 移动互斥量
- 尝试锁定互斥量
- 延迟锁定关联的互斥量
下表展示了std::unique_lock lk的成员函数:
| 成员函数 | 功能描述 |
|---|---|
lk.lock() |
锁定相关互斥量 |
lk.try_lock() |
尝试锁定相关互斥量 |
lk.try_lock_for(relTime) |
尝试锁定相关互斥量 |
lk.try_lock_until(absTime) |
尝试锁定相关互斥量 |
lk.unlock() |
解锁相关互斥量 |
lk.release() |
释放互斥量,互斥量保持锁定状态 |
lk.swap(lk2)和std::swap(lk, lk2) |
交换锁 |
lk.mutex() |
返回指向相关互斥量的指针 |
lk.owns_lock()和bool操作符 |
检查锁lk是否有锁住的互斥量 |
try_lock_for(relTime)需要传入一个时间段,try_lock_until(absTime)需要传入一个绝对的时间点。lk.try_lock_for(lk.try_lock_until)会调用关联的互斥量mut的成员函数mut.try_lock_for(mut.try_lock_until)。相关的互斥量需要支持定时阻塞,这就需要使用稳定的时钟来限制时间。
lk.try_lock尝试锁定互斥锁并立即返回。成功时返回true,否则返回false。相反,lk.try_lock_for和lk.try_lock_until则会让锁lk阻塞,直到超时或获得锁为止。如果没有关联的互斥锁,或者这个互斥锁已经被std::unique_lock锁定,那么lk.try_lock、lk.try_lock_for和lk.try_lock_for则抛出std::system_error异常。
lk.release()返回互斥量,必须手动对其进行解锁。
std::unique_lock在原子步骤中可以锁定多个互斥对象。因此,可以通过以不同的顺序锁定互斥量来避免死锁。还记得在互斥量中出现的死锁吗?
// deadlock.cpp#include <iostream>#include <chrono>#include <mutex>#include <thread>struct CriticalData {std::mutex mut;};void deadLock(CriticalData& a, CriticalData& b) {a.mut.lock();std::cout << "get the first mutex" << std::endl;std::this_thread::sleep_for(std::chrono::microseconds(1));b.mut.lock();std::cout << "get the second mutext" << std::endl;// do something with a and ba.mut.unlock();b.mut.unlock();}int main() {CriticalData c1;CriticalData c2;std::thread t1([&] {deadLock(c1, c2); });std::thread t2([&] {deadLock(c2, c1); });t1.join();t2.join();}
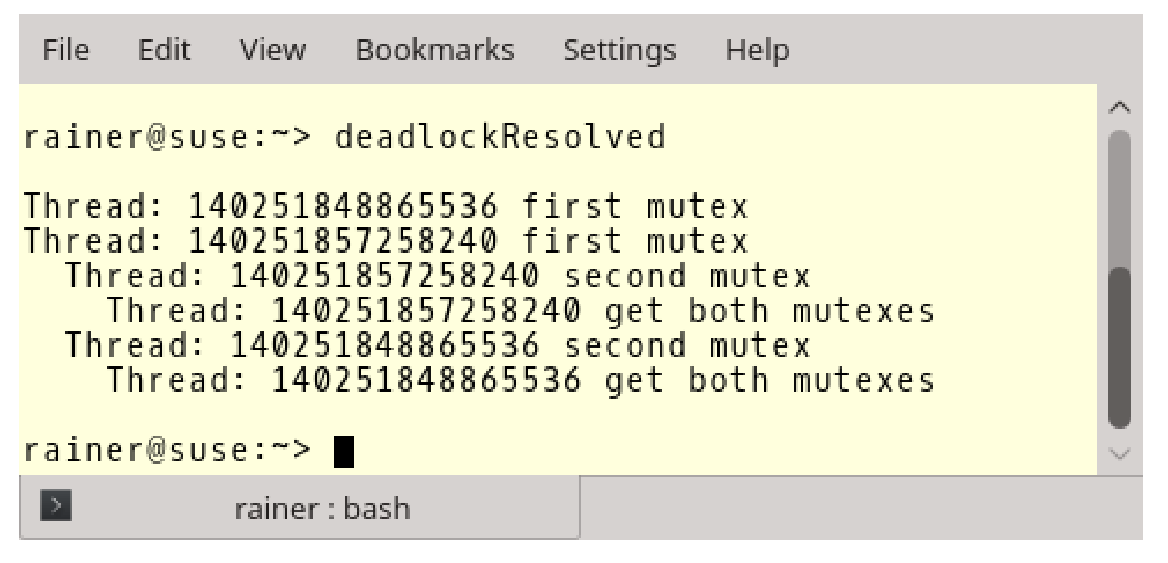
让我们来解决死锁问题。死锁必须原子地锁定互斥对象,也正是下面的程序中所展示的。
// deadlockResolved.cpp#include <iostream>#include <chrono>#include <mutex>#include <thread>using namespace std;struct CriticalData {mutex mut;};void deadLock(CriticalData& a, CriticalData& b) {unique_lock<mutex> guard1(a.mut, defer_lock);cout << "Thread: " << this_thread::get_id() << " first mutex" << endl;this_thread::sleep_for(chrono::milliseconds(1));unique_lock<mutex> guard2(b.mut, defer_lock);cout << " Thread: " << this_thread::get_id() << " second mutex" << endl;cout << " Thread: " << this_thread::get_id() << " get both mutex" << endl;lock(guard1, guard2);// do something with a and b}int main() {cout << endl;CriticalData c1;CriticalData c2;thread t1([&] {deadLock(c1, c2); });thread t2([&] {deadLock(c2, c1); });t1.join();t2.join();cout << endl;}
如果使用std::defer_lock对std::unique_lock进行构造,则底层的互斥量不会自动锁定。此时(第16行和第21行),std::unique_lock就是互斥量的所有者。由于std::lock是可变参数模板,锁操作可以原子的执行(第25行)。
使用std::lock进行原子锁定
std::lock可以在原子的锁定互斥对象。std::lock是一个可变参数模板,因此可以接受任意数量的参数。std::lock尝试使用避免死锁的算法,在一个原子步骤获得所有锁。互斥量会锁定一系列操作,比如:lock、try_lock和unlock。如果对锁或解锁的调用异常,则解锁操作会在异常重新抛出之前执行。
本例中,std::unique_lock管理资源的生存期,std::lock锁定关联的互斥量,也可以反过来。第一步中锁住互斥量,第二步中std::unique_lock管理资源的生命周期。下面是第二种方法的例子:
std::lock(a.mut, b.mut);std::lock_guard<std::mutex> guard1(a.mut, std::adopt_lock);std::lock_guard<std::mutex> guard2(b.mut, std::adopt_lock);
这两个方式都能解决死锁。
使用std::scoped_lock解决死锁
C++17中解决死锁非常容易。有了
std::scoped_lock帮助,可以原子地锁定任意数量的互斥。只需使用std::scoped_lock,就能解决所有问题。下面是修改后的死锁函数:
// deadlockResolvedScopedLock.cpp...void deadLock(CriticalData& a, CriticalData& b) {cout << "Thread: " << this_thread::get_id() << " first mutex" << endl;this_thread::sleep_for(chrono::milliseconds(1));cout << " Thread: " << this_thread::get_id() << " second mutex" << endl;cout << " Thread: " << this_thread::get_id() << " get both mutex" << endl;std::scoped_lock(a.mut, b.mut);// do something with a and b}...
std::shared_lock
C++14中添加了std::shared_lock。
std::shared_lock与std::unique_lock的接口相同,但与std::shared_timed_mutex或std::shared_mutex一起使用时,行为会有所不同。许多线程可以共享一个std::shared_timed_mutex (std::shared_mutex),从而实现读写锁。读写器锁的思想非常简单,而且非常有用。执行读操作的线程可以同时访问临界区,但是只允许一个线程写。
读写锁并不能解决最根本的问题——线程争着访问同一个关键区域。
电话本就是使用读写锁的典型例子。通常,许多人想要查询电话号码,但只有少数人想要更改。让我们看一个例子:
// readerWriterLock.cpp#include <iostream>#include <map>#include <shared_mutex>#include <string>#include <thread>std::map<std::string, int> teleBook{ {"Dijkstra", 1972}, {"Scott", 1976},{"Ritchie", 1983} };std::shared_timed_mutex teleBookMutex;void addToTeleBook(const std::string& na, int tele) {std::lock_guard<std::shared_timed_mutex> writerLock(teleBookMutex);std::cout << "\nSTARTING UPDATE " << na;std::this_thread::sleep_for(std::chrono::milliseconds(500));teleBook[na] = tele;std::cout << " ... ENDING UPDATE " << na << std::endl;}void printNumber(const std::string& na) {std::shared_lock<std::shared_timed_mutex> readerLock(teleBookMutex);std::cout << na << ": " << teleBook[na];}int main() {std::cout << std::endl;std::thread reader1([] {printNumber("Scott"); });std::thread reader2([] {printNumber("Ritchie"); });std::thread w1([] {addToTeleBook("Scott",1968); });std::thread reader3([] {printNumber("Dijkstra"); });std::thread reader4([] {printNumber("Scott"); });std::thread w2([] {addToTeleBook("Bjarne", 1965); });std::thread reader5([] {printNumber("Scott"); });std::thread reader6([] {printNumber("Ritchie"); });std::thread reader7([] {printNumber("Scott"); });std::thread reader8([] {printNumber("Bjarne"); });reader1.join();reader2.join();reader3.join();reader4.join();reader5.join();reader6.join();reader7.join();reader8.join();w1.join();w2.join();std::cout << std::endl;std::cout << "\nThe new telephone book" << std::endl;for (auto teleIt : teleBook) {std::cout << teleIt.first << ": " << teleIt.second << std::endl;}std::cout << std::endl;}
第9行中的电话簿是共享变量,必须对其进行保护。八个线程要查询电话簿,两个线程想要修改它(第31 - 40行)。为了同时访问电话簿,读取线程使用std::shared_lock<std::shared_timed_mutex>(第23行)。写线程需要以独占的方式访问临界区,第15行中的std::lock_guard<std::shared_timed_mutex>具有独占性。最后,程序显示了更新后的电话簿(第55 - 58行)。
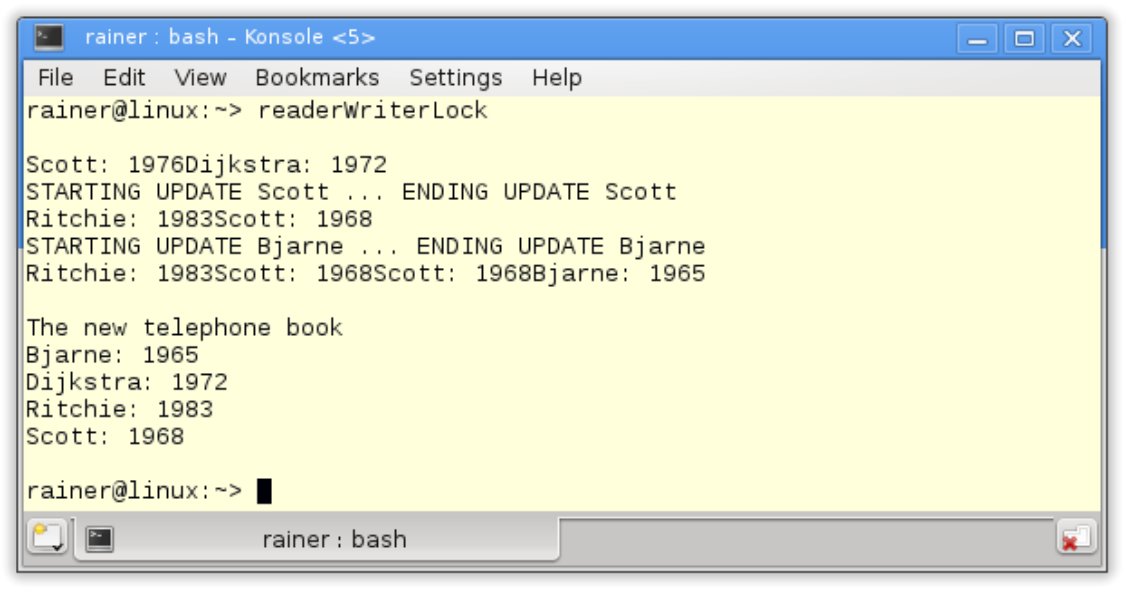
屏幕截图显示,读线程的输出是重叠的,而写线程是一个接一个地执行。这就意味着,读取操作应该是同时执行的。
这很容易让“电话簿”有未定义行为。
未定义行为
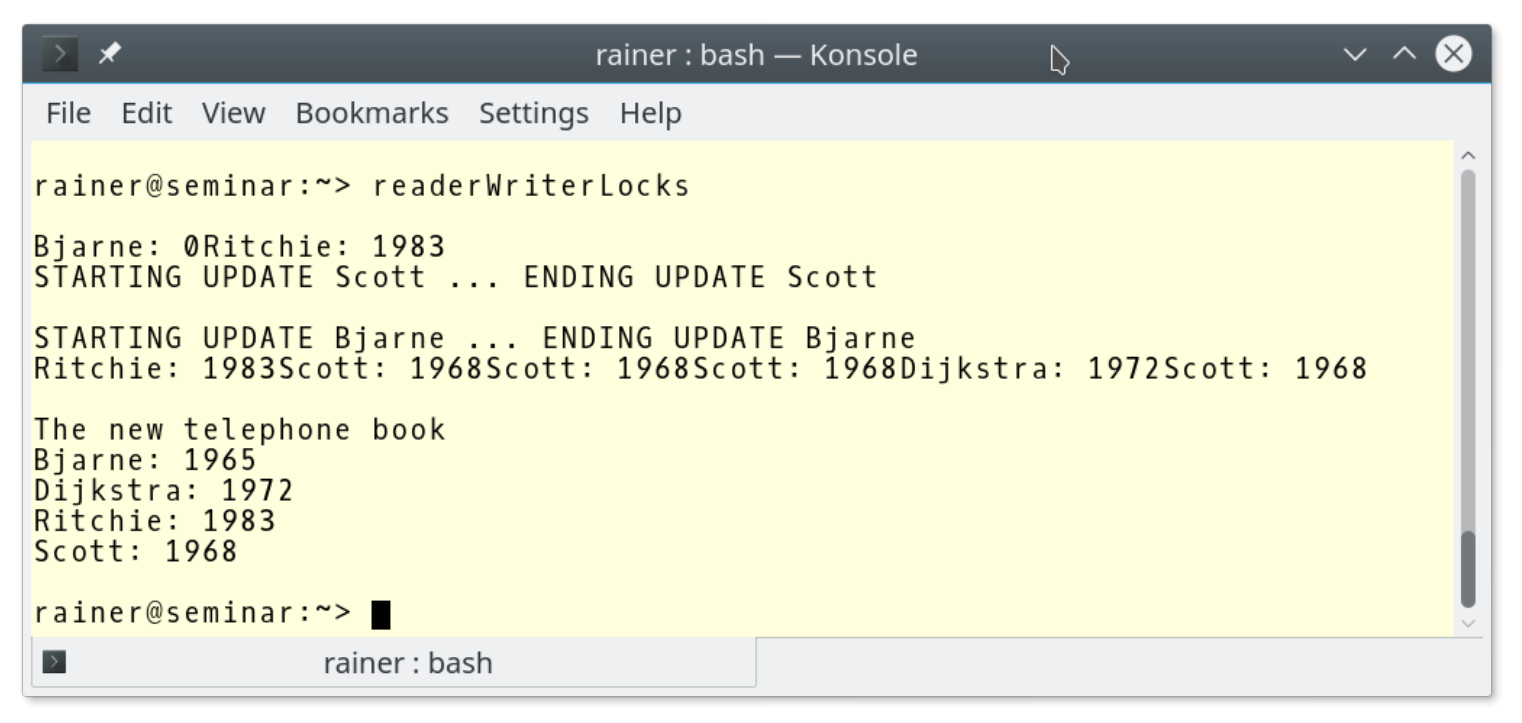
程序有未定义行为。更准确地说,它有一个数据竞争。啊哈!?在继续之前,停下来想几秒钟。
数据竞争的特征是,至少有两个线程同时访问共享变量,并且其中至少有一个线程是写线程,这种情况很可能在程序执行时发生。使用索引操作符读取容器中的值,并可以修改它。如果元素在容器中不存在,就会发生这种情况。如果在电话簿中没有找到“Bjarne”,则从读访问中创建一对(“Bjarne”,0)。可以通过在第40行前面打印Bjarne的数据,强制数据竞争。
可以看到的是,Bjarne的值是0。
修复这个问题的最直接的方法是使用printNumber函数中的读取操作:
// readerWriterLocksResolved.cpp...void printNumber(const std::string& na){std::shared_lock<std::shared_timed_mutex> readerLock(teleBookMutex);auto searchEntry = teleBook.find(na);if(searchEntry != teleBook.end()){std::cout << searchEntry->first << ": " << searchEntry->second << std::endl;}else{std::cout << na << " not found!" << std::endl;}}...
如果电话簿里没有相应键值,就把键值写下来,并且向控制台输出“找不到!”。
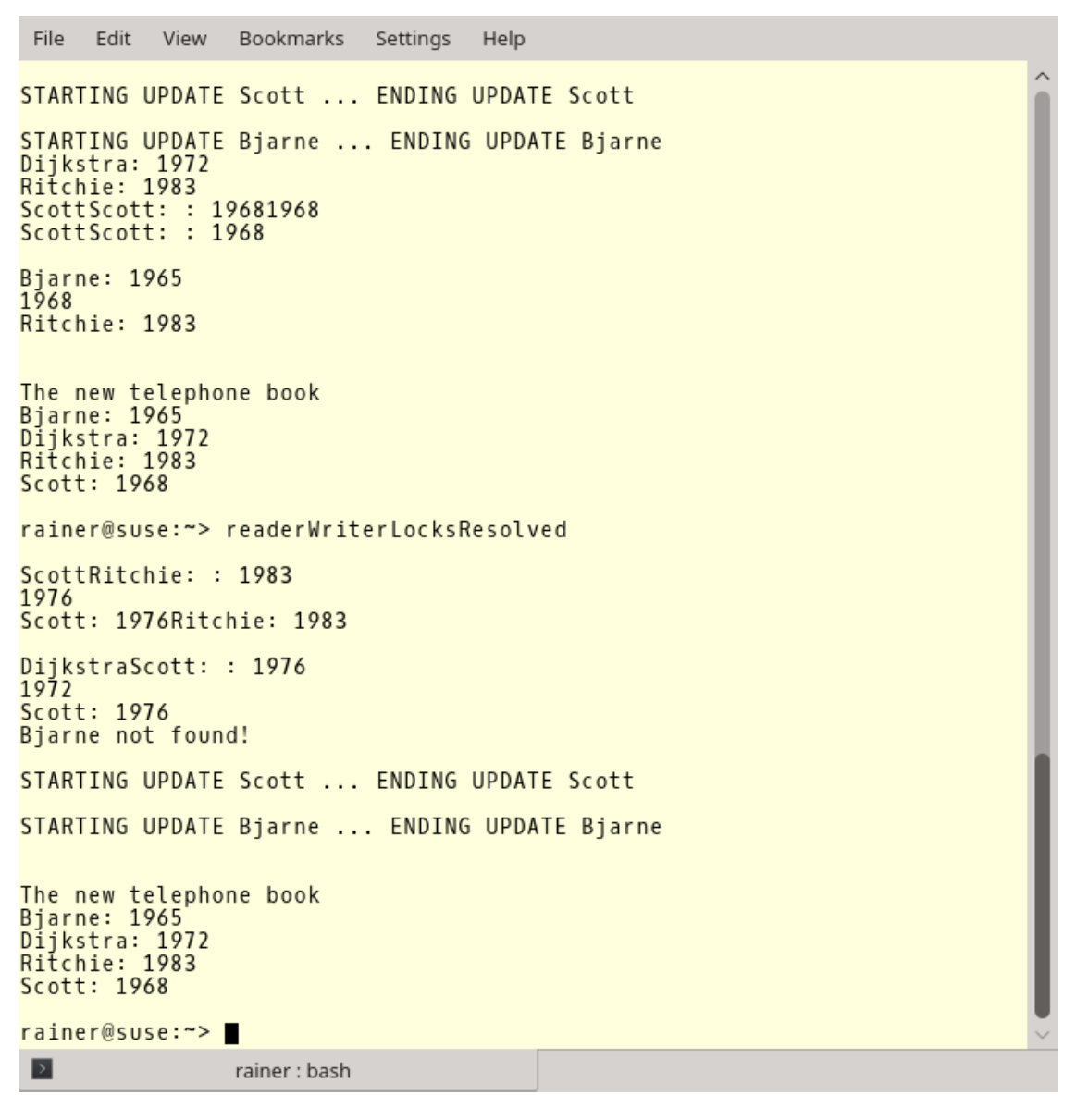
第二个程序执行的输出中,可以看到Bjarne的信息没有找到。第一个程序执行中,首先执行了addToTeleBook,所以Bjarne被找到了。
线程安全的初始化
如果变量从未修改过,那么就不需要锁或原子变量来进行同步,只需确保以线程安全的方式初始化就可以了。
C++中有三种以线程安全初始化变量的方法:
- 常量表达式
std::call_once与std::once_flag结合的方式- 作用域的静态变量
主线程中的安全初始化
以线程安全的方式初始化变量的最简单方法,是在创建任何子线程之前在主线程中初始化变量。
常数表达式
常量表达式,是编译器可以在编译时计算的表达式,隐式线程安全的。将关键字constexpr放在变量前面,会使该变量成为常量表达式。常量表达式必须初始化。
constexpr double pi = 3.14;
此外,用户定义的类型也可以是常量表达式。不过,必须满足一些条件才能在编译时初始化:
- 不能有虚方法或虚基类
- 构造函数必须为空,且本身为常量表达式
- 必须初始化每个基类和每个非静态成员
- 成员函数在编译时应该是可调用的,必须是常量表达式
MyDouble的实例满足所有这些需求,因此可以在编译时实例化。所以,这个实例化是线程安全的。
// constexpr.cpp#include <iostream>class MyDouble {private:double myVal1;double myVal2;public:constexpr MyDouble(double v1, double v2):myVal1(v1),myVal2(v2){}constexpr double getSum() const { return myVal1 + myVal2; }};int main() {constexpr double myStatVal = 2.0;constexpr MyDouble myStatic(10.5, myStatVal);constexpr double sumStat = myStatic.getSum();}
std::call_once和std::once_flag
通过使用std::call_once函数,可以注册一个可调用单元。std::once_flag确保已注册的函数只调用一次。可以通过相同的std::once_flag注册其他函数,只能调用注册函数组中的一个函数。
std::call_once遵循以下规则:
- 只执行其中一个函数的一次,未定义选择哪个函数执行。所选函数与
std::call_once在同一个线程中执行。 - 上述所选函数的执行成功完成之前,不返回任何调用。
- 如果函数异常退出,则将其传播到调用处。然后,执行另一个函数。
这个短例演示了std::call_once和std::once_flag的应用(都在头文件<mutex>中声明)。
// callOnce.cpp#include <iostream>#include <thread>#include <mutex>std::once_flag onceFlag;void do_once() {std::call_once(onceFlag, [] {std::cout << "Only once." << std::endl; });}void do_once2() {std::call_once(onceFlag, [] {std::cout << "Only once2." << std::endl; });}int main() {std::cout << std::endl;std::thread t1(do_once);std::thread t2(do_once);std::thread t3(do_once2);std::thread t4(do_once2);t1.join();t2.join();t3.join();t4.join();std::cout << std::endl;}
程序从四个线程开始(第21 - 24行)。其中两个调用do_once,另两个调用do_once2。预期的结果是“Only once”或“Only once2”只显示一次。
单例模式保证只创建类的一个实例,这在多线程环境中是一个具有挑战性的任务。由于std::call_once和std::once_flag的存在,实现这样的功能就非常容易了。
现在,单例以线程安全的方式初始化。
// singletonCallOnce.cpp#include <iostream>#include <mutex>using namespace std;class MySingleton {private:static once_flag initInstanceFlag;static MySingleton* instance;MySingleton() = default;~MySingleton() = default;public:MySingleton(const MySingleton&) = delete;MySingleton& operator=(const MySingleton&) = delete;static MySingleton* getInstance() {call_once(initInstanceFlag, MySingleton::initSingleton);return instance;}static void initSingleton() {instance = new MySingleton();}};MySingleton* MySingleton::instance = nullptr;once_flag MySingleton::initInstanceFlag;int main() {cout << endl;cout << "MySingleton::getInstance(): " << MySingleton::getInstance() << endl;cout << "MySingleton::getInstance(): " << MySingleton::getInstance() << endl;cout << endl;}
静态变量initInstanceFlag在第11行声明,在第31行初始化。静态方法getInstance(第20 - 23行)使用initInstanceFlag标志,来确保静态方法initSingleton(第25 - 27行)只执行一次。
default和delete修饰符
可以使用关键字
default向编译器申请函数实现,编译器可以创建并实现它们。用
delete修饰一个成员函数的话,则该函数不可用,因此不能被调用。如果尝试使用它们,将得到一个编译时错误。这里有default和delete的详细信息。
MySingleton::getIstance()函数显示了单例的地址。
有作用域的静态变量
具有作用域的静态变量只创建一次,并且是惰性的,惰性意味着它们只在使用时创建。这一特点是基于Meyers单例的基础,以Scott Meyers命名,这是迄今为止C++中单例模式最优雅的实现。C++11中,带有作用域的静态变量有一个额外的特点,可以以线程安全的方式初始化。
下面是线程安全的Meyers单例模式。
// meyersSingleton.cppclass MySingleton {public:static MySingleton& getInstance() {static MySingleton instance;return instance;}private:MySingleton();~MySingleton();MySingleton(const MySingleton&) = delete;MySingleton& operator=(const MySingleton&) = delete;};MySingleton::MySingleton()= default;MySingleton::~MySingleton()= default;int main(){MySingleton::getInstance();}
编译器对静态变量的支持
如果在并发环境中使用Meyers单例,请确保编译器对于C++11的支持。开发者经常依赖于C++11的静态变量语义,但是有时他们的编译器不支持这项特性,结果可能会创建多个单例实例。
讨论了这么多,而在thread_local中就没有共享变量的问题了。
接下来,我们来了解一下thread_local。

若有收获,就点个赞吧
0 人点赞
