挑战
编写并发程序本身就很复杂,即便是使用C++11和C++14的新特性,也是如此。我希望通过用一整章的内容来讨论并发编程的挑战,读者们会更清楚其中的陷阱与挑战。
ABA问题
ABA表示读取了一个值两次,每次都返回A值。因此,可以得出这样的结论:两次读取之间,相应的变量没有任何变化。然而,在两次读取之间,变量可能有被更新为B的时刻。
用一个简单的场景来比拟这个问题。
一个例子
这个场景里,你坐在车里等待交通灯变绿,绿色代表B,红色代表A。接下来会发生了什么?
- 你看到交通灯,它是红色的(A)。
- 因为很无聊,你打开手机看新闻,而忘记了时间。
- 当你再看一次交通灯时。该死!还是红色(A)。
当然,交通灯在你两次抬头看之间已经变成绿灯过。对于线程(进程)来说,意味着什么?
- 线程1读取值为A的变量
var。 - 线程1被抢占,线程2运行。
- 线程2将变量
var从A更改为B,再更改为A。 - 线程1继续运行并检查变量
var的值并得到A。因为获取到值A,线程1继续运行。
通常这不是一个问题,可以忽略。
非关键的ABA
// fetch_mult.cpp#include <atomic>#include <iostream>template <typename T>T fetch_mult(std::atomic<T>& shared, T mult) {T oldValue = shared.load();while (!shared.compare_exchange_strong(oldValue, oldValue * mult));return oldValue;}int main() {std::atomic<int> myInt{ 5 };std::cout << myInt << std::endl;fetch_mult(myInt, 5);std::cout << myInt << std::endl;}
compare_exchange_strong和compare_exchange_weak可以在fetch_mult(第6行)中观察到的ABA问题。fetch_mult将std::atomic<t>& shared和mult相乘。
关键是,读取旧值T oldValue = shared.load()第8行和第9行中的新值比较之间有一个小的时间窗口。因此,另一个线程可以介入,将oldValue从更改为另一个值,然后再返回oldValue。旧值是A,另一个线程修改的值是ABA中的B。
通常,当读操作处理相同的、未更改的变量,则没有什么影响。但是,在无锁并发的数据结构中,ABA可能会产生重大影响。
无锁数据结构
这里不会详细介绍无锁数据结构,仅用单链表实现的无锁堆栈,堆栈只支持两个操作:
- pop:弹出顶部对象,并返回指向它的指针。
- push:将指定的对象推入堆栈。
这里使用伪代码描述pop操作,以便了解ABA问题。pop操作执行以下步骤:
- 获取头节点:head
- 获取后续节点:headNext
- 如果head仍然是堆栈的头节点,则将headNext作为新的头结点。
下面是堆栈的前两个节点:
Stack: TOP -> head -> headNext -> ...
现在,来构造ABA问题的情景。
构造ABA
我们从下面的堆栈开始:
Stack: TOP -> A -> B -> C
线程1处于活动状态,希望弹出堆栈的头节点。
Thread 1操作时
head = A
headNext = B
线程1完成pop前,线程2开始工作。
Thread 2 pop A
Stack: TOP -> B -> CThread 2 pop B 并且删除B
Stack: TOP -> CThread 2把A推回去
Stack: TOP -> A -> C
线程1重新调度,并检查A == head,因为当前A == head,那么headNext应该是B,但B已经被删除了。因此,程序具有未定义行为。
用什么来拯救ABA问题呢?接下来就介绍,ABA问题的一些补救措施。
补救措施
ABA的概念问题很容易理解,解决方案是消除节点过早的删除。以下是一些补救措施:
标记参考状态
可以使用地址的低位向每个节点添加标记,以表示节点成功修改的频率。尽管检查返回true,但比较-交换(CAS)会失败。这个想法并不能解决问题,因为标记位可能最终会交换。
引用标记状态通常用于事务内存中。
接下来的三种技术是基于延迟回收的思想。
垃圾收集
垃圾收集只保证在不再需要时删除变量。这听起来很有希望解决ABA问题,但有一个明显的缺点。大多数垃圾收集器不是无锁的,即使有一个无锁的数据结构,整个系统也不是无锁的。
风险指针
维基页面: Hazard Pointers
风险指针系统中,每个线程都保存一个风险指针列表,指示线程当前正在访问哪些节点(许多系统中,这个“列表”可能仅限于一两个元素)。风险指针列表中的节点不能被任何其他线程修改或释放。当一个线程想要删除一个节点时,它会将其放在一个节点列表中,进行“稍后释放”,直到没有其他线程的危险列表包含该指针时,才释放该节点的内存。一个专门的垃圾收集线程可以手工进行垃圾收集(如果“稍后释放”的列表由所有线程共享);或者,清理“被释放”列表可以由每个工作线程,作为“pop”等操作的一部分。
RCU 读取-复制-更新
RCU是Read Copy Update的缩写,是一种用于只读数据结构的同步技术。RCU是由Paul McKenney创建的,自2002年以来一直在Linux内核中使用。
思想很简单,就跟缩写一样,要修改数据,要复制数据。反之,所有的读取都使用原始数据。如果没有读取操作,那么可以安全地将数据进行修改。
要了解更多关于RCU的细节,请阅读Paul McKenney的这篇文章:What is RCU, Fundamentally?
两个新的提案
作为并发工具包的一部分,有两个关于未来C++标准的提案。关于风险指针的提案是P0233R0,关于RCU的提案是P0461R0 。
阻塞问题
为了说明我的观点,需要将条件变量与谓词结合。不这样做的话,程序可能会出现伪唤醒或未唤醒的情况。
如果使用没有谓词的条件变量,则通知线程可能在等待线程等待之前发送通知,等待线程将永远等待,这种现象被称为“未唤醒“。
程序如下。
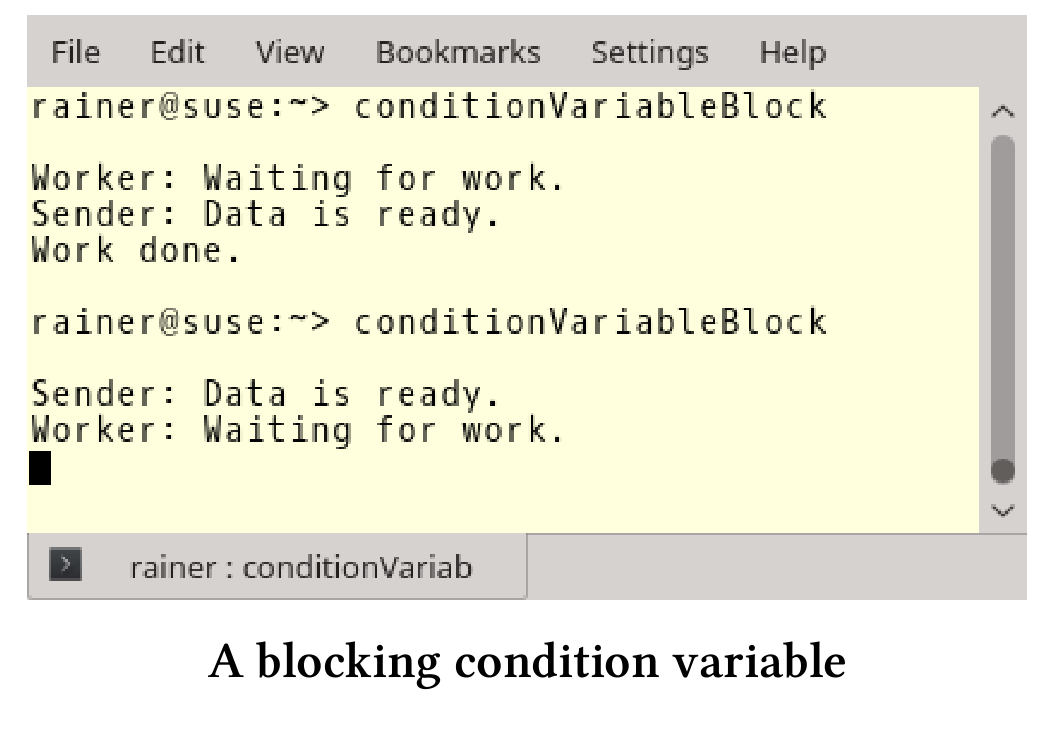
// conditionVariableBlock.cpp#include <iostream>#include <condition_variable>#include <mutex>#include <thread>std::mutex mutex_;std::condition_variable condVar;bool dataReady;void waitingForWork() {std::cout << "Worker: Waiting for work." << std::endl;std::unique_lock<std::mutex> lck(mutex_);condVar.wait(lck);// do the workstd::cout << "Work done." << std::endl;}void setDataReady() {std::cout << "Sender: Data is ready." << std::endl;condVar.notify_one();}int main() {std::cout << std::endl;std::thread t1(setDataReady);std::thread t2(waitingForWork);t1.join();t2.join();std::cout << std::endl;}
程序的第一次工作得很好,第二次锁定的原因是notify(第28行)发生在线程t2(第37行)等待之前(第19行)。
当然,死锁和活锁是条件竞争的副产物。死锁通常取决于线程的交错,有时会发生,有时不会。活锁与死锁类似,当死锁阻塞时,活锁“似乎’’没有阻塞程序。
破坏程序的不变量
程序不变量,应该在程序的整个生命周期中”保持不变“。
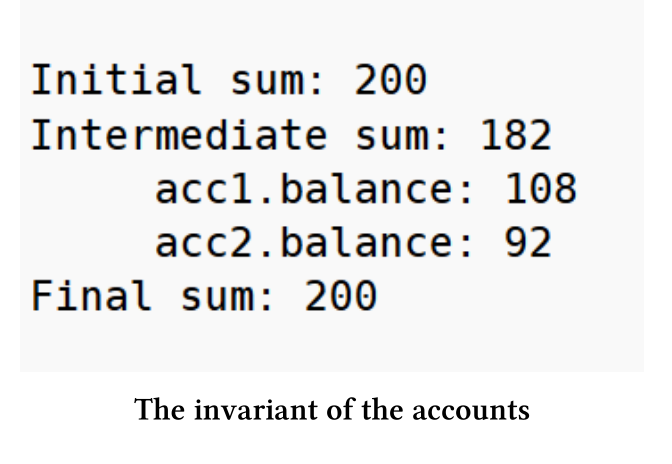
恶性条件竞争破坏程序的不变量。下面程序的不变量是所有余额的总和,例子中是200欧元,因为每个账户起步都是100欧元(第9行)。
// breakingInvariant.cpp#include <atomic>#include <functional>#include <iostream>#include <thread>struct Account {std::atomic<int> balance{ 100 };};void transferMoney(int amount, Account& from, Account& to) {using namespace std::chrono_literals;if (from.balance >= amount) {from.balance -= amount;std::this_thread::sleep_for(1ns);to.balance += amount;}}void printSum(Account& a1, Account& a2) {std::cout << (a1.balance + a2.balance) << std::endl;}int main() {std::cout << std::endl;Account acc1;Account acc2;std::cout << "Initial sum: ";printSum(acc1, acc2);std::thread thr1(transferMoney, 5, std::ref(acc1), std::ref(acc2));std::thread thr2(transferMoney, 13, std::ref(acc2), std::ref(acc1));std::cout << "Intermediate sum: ";std::thread thr3(printSum, std::ref(acc1), std::ref(acc2));thr1.join();thr2.join();thr3.join();std::cout << " acc1.balance: " << acc1.balance << std::endl;std::cout << " acc2.balance: " << acc2.balance << std::endl;std::cout << "Final sum: ";printSum(acc1, acc2);std::cout << std::endl;}
开始时,账户的总数是200欧元。第33行,通过使用第21 - 23行中的printSum函数来显示金额和。第38行使不变量可见。因为第16行有1ns的短睡眠,所以中间的金额是182欧元。最后,每个账户的余额都是正确的(第44行和第45行),金额是200欧元(第48行)。
下面是程序的输出。
数据竞争
数据竞争是指至少两个线程同时访问一个共享变量的情况,并且至少有一个线程尝试修改该变量。
程序有数据竞争,则会出现未定义行为,结果是不可预期的。
来看一个数据竞争的程序。
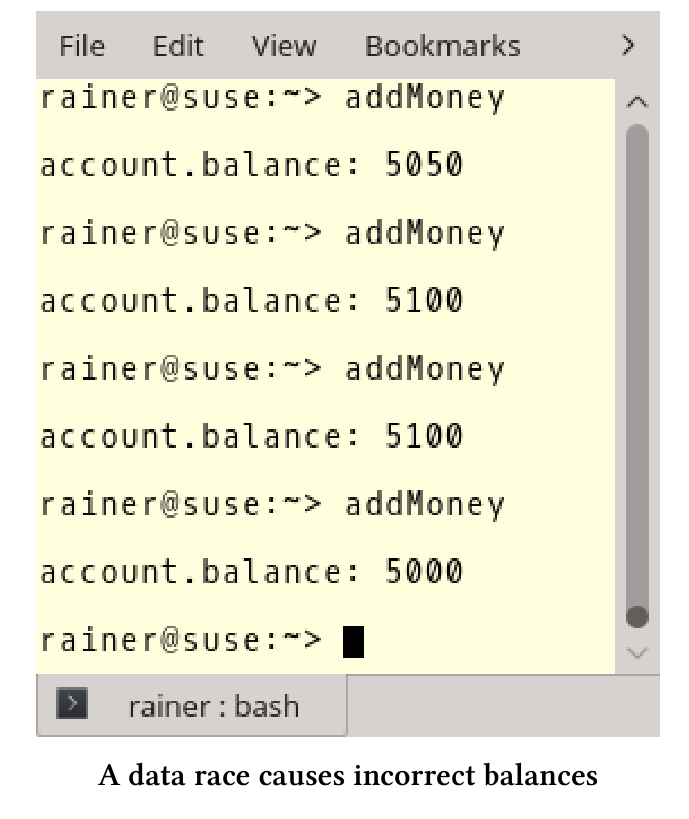
// addMoney.cpp#include <functional>#include <iostream>#include <thread>#include <vector>struct Account {int balance{ 100 };};void addMoney(Account& to, int amount) {to.balance += amount;}int main() {std::cout << std::endl;Account account;std::vector<std::thread> vecThreads(100);for (auto& thr : vecThreads) thr = std::thread(addMoney, std::ref(account), 50);for (auto& thr : vecThreads) thr.join();std::cout << "account.balance: " << account.balance << std::endl;std::cout << std::endl;}
100个线程addMoney函数将向相同的帐户(第20行)添加50欧元(第25行)。关键的,对账户的写入是不同步的,这里有一个数据竞争,因为是未定义行为,所以结果无效。最后的余额(第30行)会在5000欧元和5100欧元之间。
死锁
死锁是一种状态,因为要等待没有得到的资源的释放,所以至少有一个线程会永久阻塞。
造成死锁的主要原因有两个:
- 互斥锁未解锁。
- 以不同的顺序锁定互斥锁。
为了避免第二个问题,在经典C++中使用了诸如层次锁之类的技术。
有关死锁,以及如何用现代C++克服死锁的详细信息,请参阅互斥量和锁的章节内容。
多次锁定非递归互斥锁
多次锁定非递归互斥锁会导致未定义行为。
// lockTwice.cpp#include <iostream>#include <mutex>int main() {std::mutex mut;std::cout << std::endl;std::cout << "first lock call" << std::endl;mut.lock();std::cout << "second lock call" << std::endl;mut.lock();std::cout << "third lock call" << std::endl;}通常会死锁。

伪共享
当处理器从主存中读取一个变量(如int)时,从内存中读取的数据要大于int的大小。处理器会从缓存中读取整个高速缓存行(通常为64字节)。
如果两个线程,同时读取位于同一高速缓存行上的不同变量a和b,则会发生伪共享。虽然a和b在逻辑上是分开的,但在物理地址上是相连的。由于a和b共享同一条高速缓存线行,因此有必要在高速缓存行上进行硬件同步。得到了正确的结果,但是并发的性能下降了。正是这种现象发生在下面的程序中:
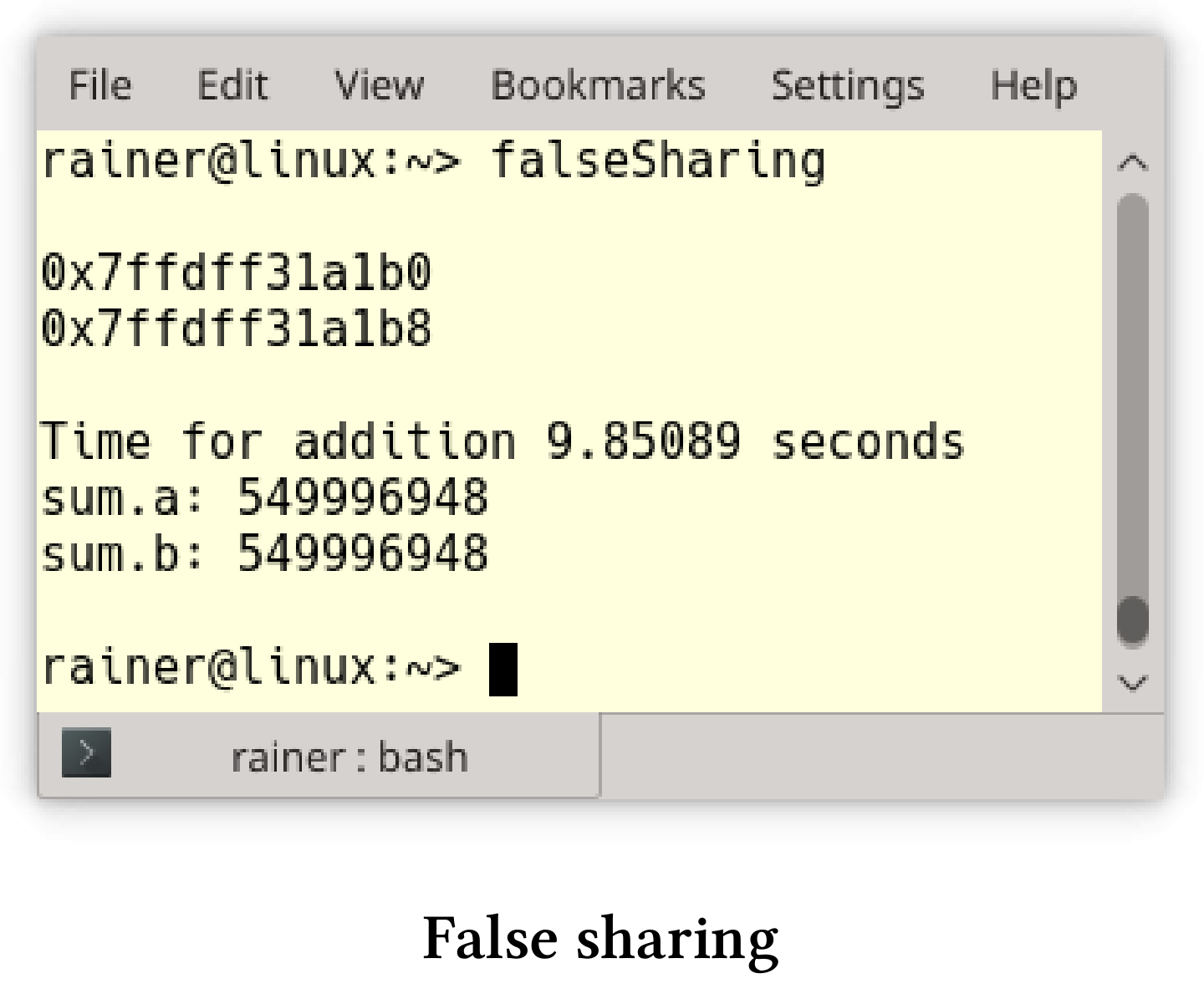
// falseSharing.cpp#include <algorithm>#include <chrono>#include <iostream>#include <random>#include <thread>#include <vector>constexpr long long size{ 100'000'000 };struct Sum {long long a{ 0 };long long b{ 0 };};int main() {std::cout << std::endl;Sum sum;std::cout << &sum.a << std::endl;std::cout << &sum.b << std::endl;std::cout << std::endl;std::vector<int> randValues, randValues2;randValues.reserve(size);randValues2.reserve(size);std::mt19937 engine;std::uniform_int_distribution<> uniformDist(1, 10);int randValue;for (long long i = 0; i < size; ++i) {randValue = uniformDist(engine);randValues.push_back(randValue);randValues2.push_back(randValue);}auto sta = std::chrono::steady_clock::now();std::thread t1([&sum, &randValues] {for (auto val : randValues) sum.a += val;});std::thread t2([&sum, &randValues2] {for (auto val : randValues2)sum.b += val;});t1.join(), t2.join();std::chrono::duration<double> dur = std::chrono::steady_clock::now() - sta;std::cout << "Time for addition " << dur.count()<< " seconds" << std::endl;std::cout << "sum.a: " << sum.a << std::endl;std::cout << "sum.b: " << sum.b << std::endl;std::cout << std::endl;}
第13行和第14行中的变量a和b共享同个缓存行。线程t1(第44行)和线程t2同时使用两个变量,对向量randValues和randValues2中的元素进行求和。两个向量在1到10之间都有1亿个整数。程序的输出显示了一些有趣的事情,a和b在8字节边界上对齐,因为我的操作系统中的long long int是8字节对齐的。
如果将a和b的对齐方式改为64字节会发生什么?64字节是我系统上的高速缓存行的大小。我要对结构做点小改动,这次不用种子来生成随机数,所以每次都得到的随机数相同。
struct Sum{alignas(64) long long a{0};alignas(64) long long b{0};};

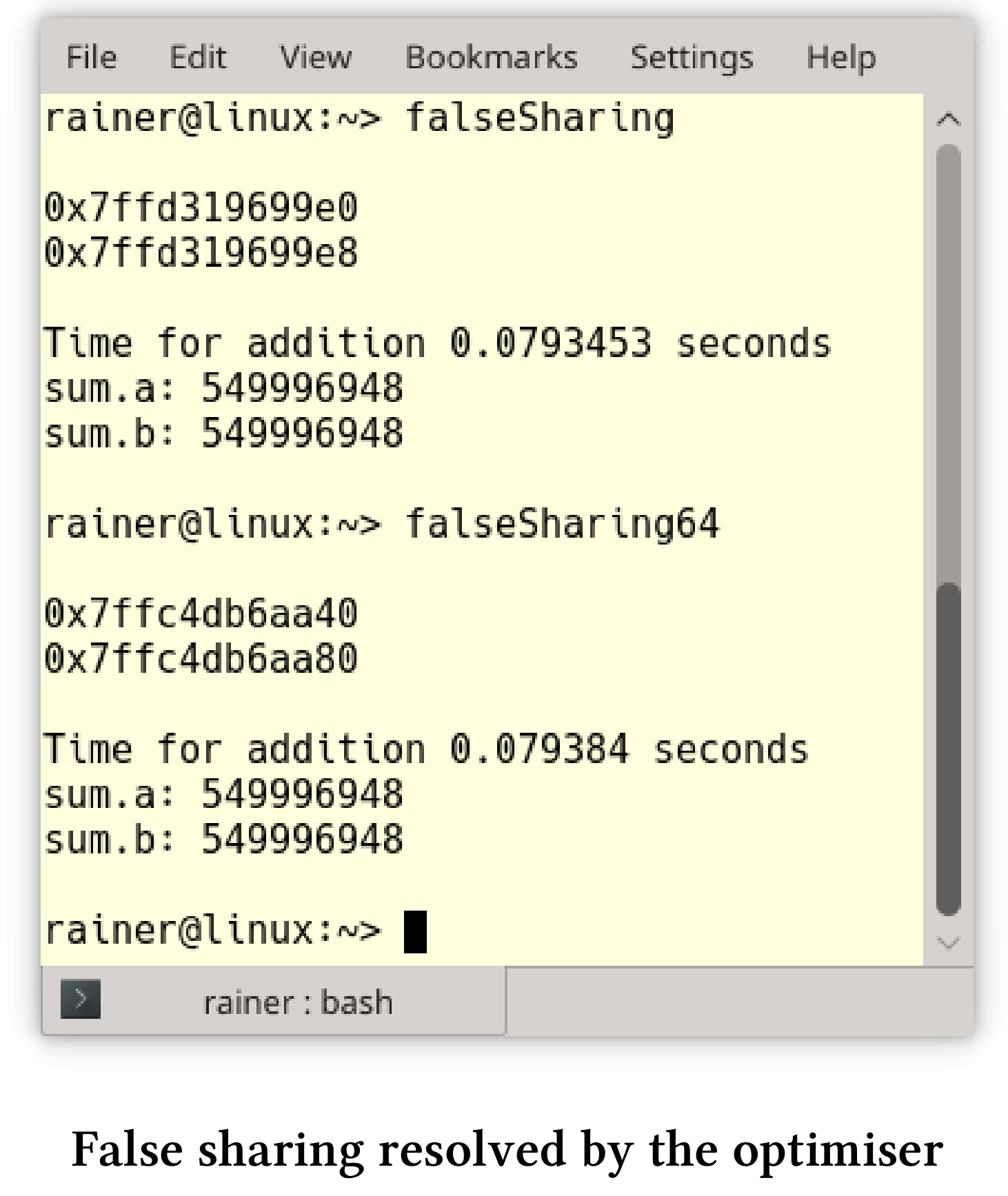
现在,a和b在64字节边界处对齐,程序速度提高了6倍多。原因是a和b现在不在同一高速缓存行上。
用优化器检测伪共享
如果我用最大的优化选项编译的程序,优化器会检测到伪共享并消除它。这意味着,我得到了相同的性能数据与真共享,这也适用于Windows。以下是优化后的性能数字。
C++17中的
std:: hardware_destructive_interference_size和与std:: hardware_constructive_interference_size
std::hardware_destructive_interference_size和std::hardware_constructive_interference_size允许以一种可移植的方式处理高速缓存行的大小。std::hardware_destructive_interference_size返回两个对象之间的最小偏移量,以避免伪共享;std::hardware_constructive_interference_size返回相邻内存的最大大小,以满足真共享。在C++17中,Sum可以以一种平台无关的方式编写。
struct Sum{alignas(std::hardware_destructive_interference_size) long long a{0};alignas(std::hardware_destructive_interference_size) long long b{0};};
变量的生命周期问题
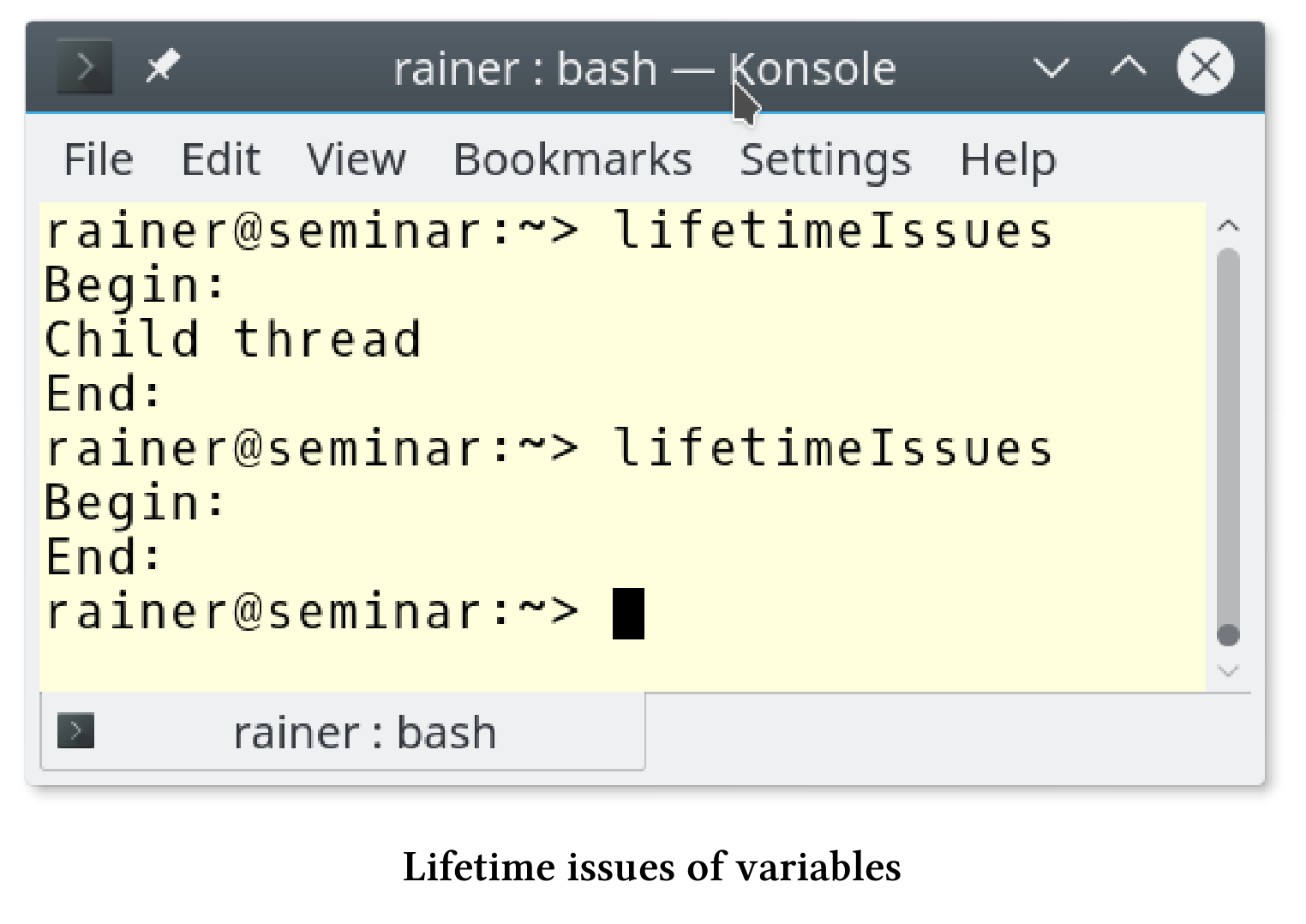
写一个具有生命周期相关问题的C++示例非常容易。让创建的线程t在后台运行(也就是说,它通过调用t.detach()来分离),并且让它只完成一半的工作。这里,创建者线程不会等待子线程完成。在这种情况下,必须非常小心,最好不要在子线程中使用属于创建线程的任何东西。
// lifetimeIssues.cpp#include <iostream>#include <string>#include <thread>int main() {std::cout << "Begin: " << std::endl;std::string mess{ "Child thread" };std::thread t([&mess] {std::cout << mess << std::endl; });t.detach();std::cout << "End:" << std::endl;}
这程序太简单了。线程t使用std::cout和变量mess,它们都属于主线程。结果是,在第二次运行时,我看不到子线程的输出。只有“Begin:”(第9行)和“End:”(第16行)打印了出来。
移动线程
移动线程会使线程的生命周期问题变得更加复杂。
线程支持移动语义,但不支持复制语义。原因是std::thread的复制构造函数被设置为delete:thread (const thread&) = delete;。试想,如果线程在持有锁的情况下能进行复制,会发生什么。
让我们移动一个线程。
错误地移动线程
// threadMoved.cpp#include <iostream>#include <thread>#include <utility>int main(){std::thread t([]{std::cout << std::this_thread::get_id();});std::thread t2([]{std::cout << std::this_thread::get_id();});t = std::move(t2);t.join();t2.join();}
线程t和t2应该完成它们的工作:打印它们的id。除此之外,线程t2的所有权移动到t(第12行)。最后,主线程处理它的子线程并汇入它们。等一下,结果与我的预期大不相同:
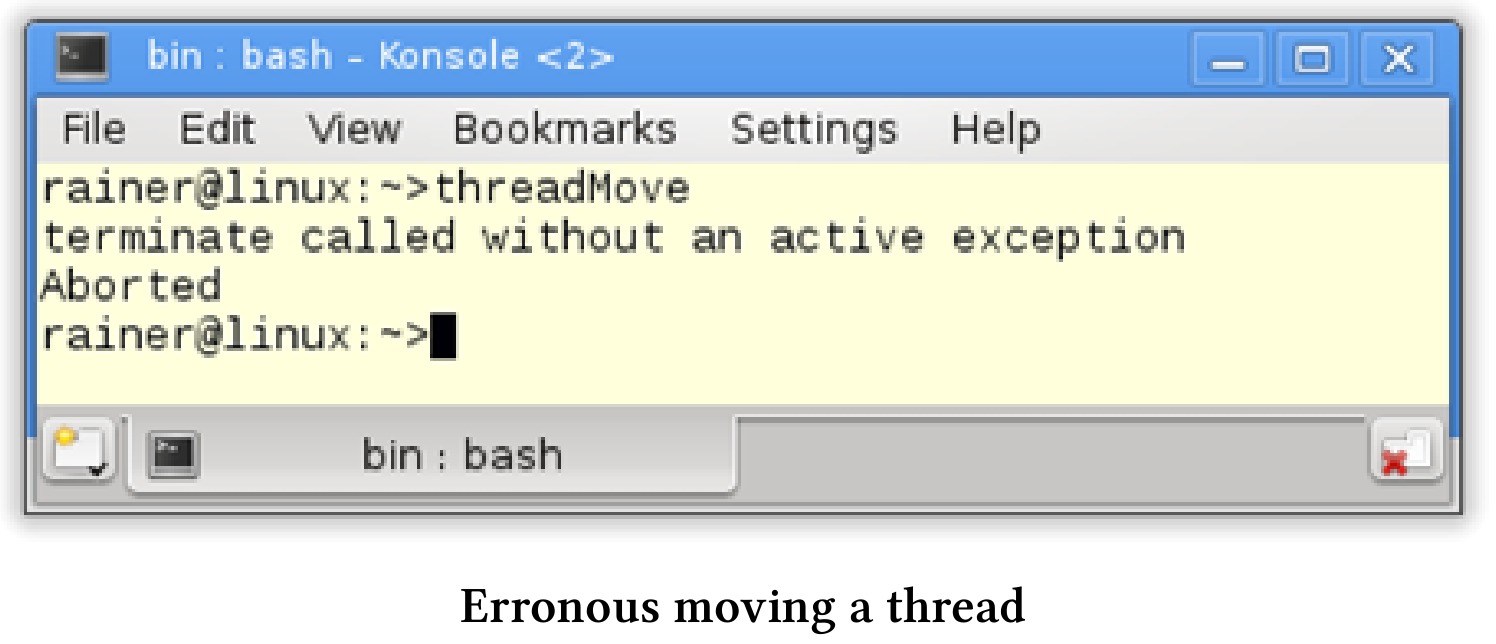
出了什么问题?这里有两个问题:
- 通过移动线程
t2,t获得一个新的可调用单元,并调用它的析构函数。结果,t的析构函数调用std::terminate,原始的t线程仍然是可汇入的。 - 线程
t2没有相关的可调用单元,在没有可调用单元的线程上调用join会导致异常std::system_error。
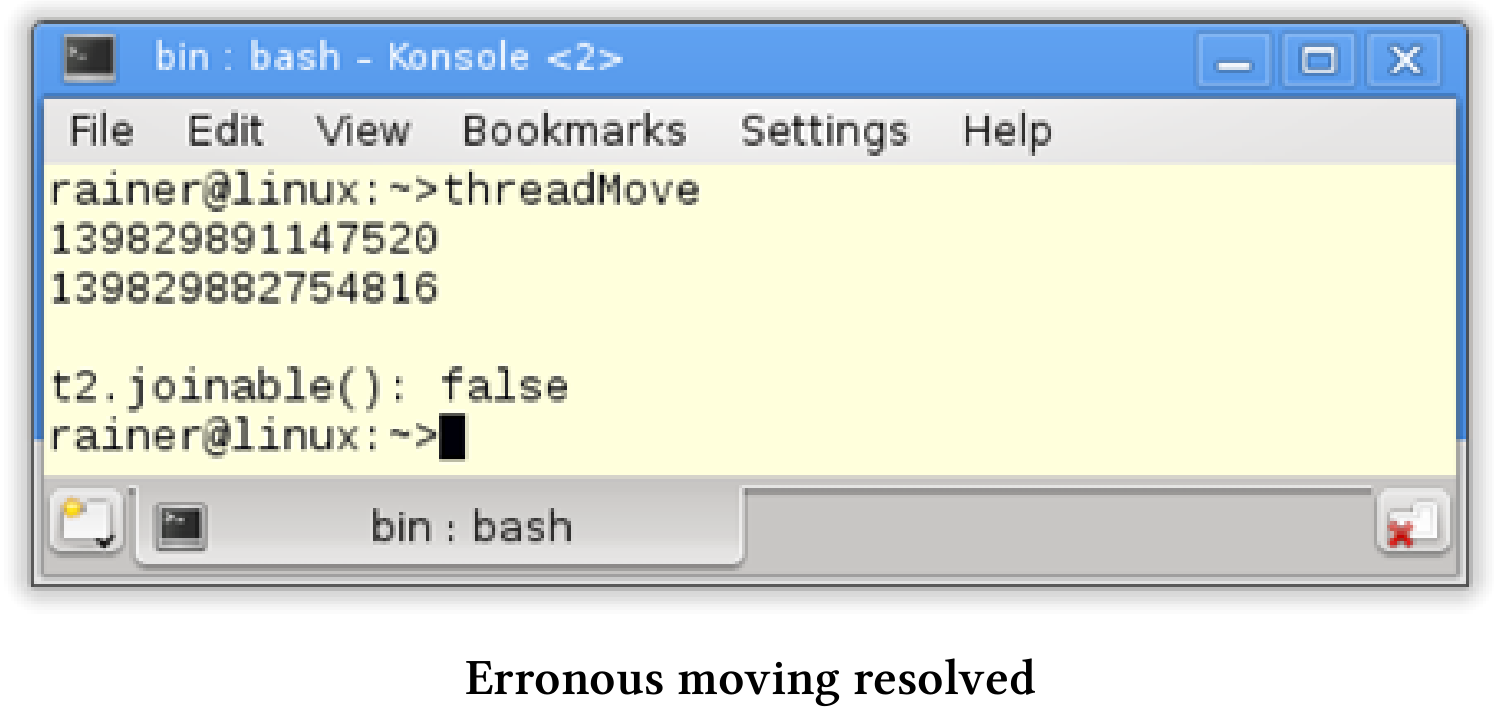
了解了这一点,修复工作就很简单了。
// threadMovedFixed.cpp#include <iostream>#include <thread>#include <utility>int main(){std::thread t([]{std::cout << std::this_thread::get_id();});std::thread t2([]{std::cout << std::this_thread::get_id();});t.join();t = std::move(t2);t2.join();std::cout << "\n";std::cout << std::boolalpha << "t2.joinable(): " << t2.joinable() << std::endl;}
结果是线程t2不可汇入。
竞态条件
竞态条件是一种情况,其中操作的结果取决于某些操作的交错。
竞态条件很难发现。由于其取决于线程是否交错出现,也就是内核的数量、系统的利用率或可执行文件的优化级别,都可能是导致出现竞态条件的原因。
竞态条件本身并没什么。但线程以不同的方式交织在一起后,常常会导致严重的问题。这种情况下,称其为恶性竞争条件。恶意竞争条件的典型症状表现:数据竞争、破坏程序不变量、阻塞线程,或变量有生存周期问题等。

若有收获,就点个赞吧
0 人点赞
