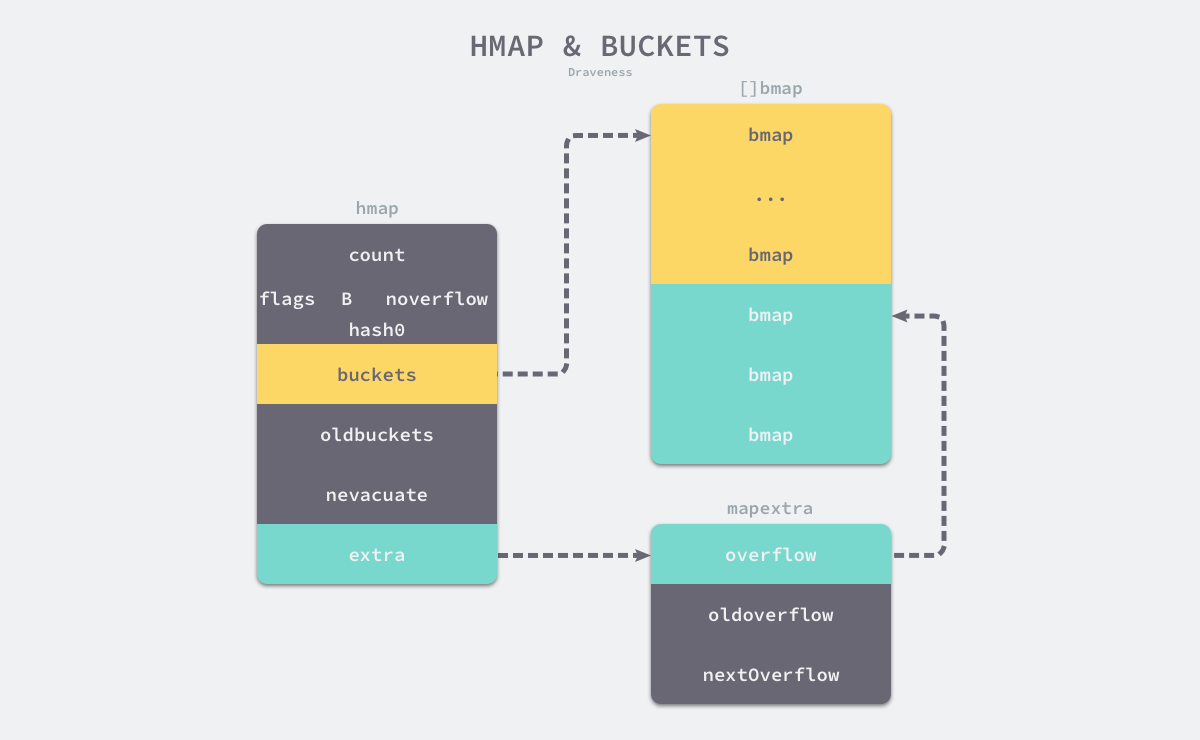
Go map 的总体结构
type hmap struct {count int // 元素个数flags uint8 // 写标志,是否有 goroutine 在写该 mapB uint8 // buckets 的长度,len(buckets) = 2 ^ Bnoverflow uint16hash0 uint32 // 随机遍历时的哈希种子?buckets unsafe.Pointer // 正常桶oldbuckets unsafe.Pointernevacuate uintptrextra *mapextra // 溢出桶}type mapextra struct {overflow *[]*bmapoldoverflow *[]*bmapnextOverflow *bmap}
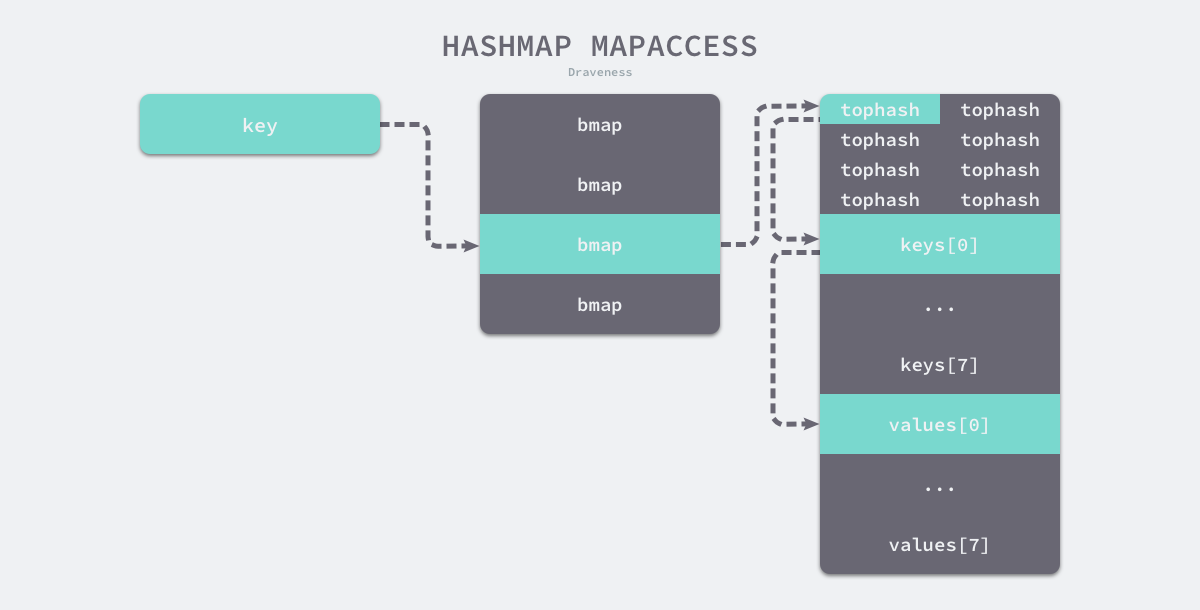
type bmap struct {topbits [8]uint8keys [8]keytypevalues [8]valuetypepad uintptr // 用于内存对齐overflow uintptr}
// tophash 的六个状态emptyRest = 0 // 不仅当前的 K-V 位置可用,其后的 K-V 位置均可用emptyOne = 1 //evacuatedX = 2evacuatedY = 3evacuatedEmpty = 4minTopHash = 5
- 在存储上,使用正常桶 buckets 与溢出桶 extra 结合,每个正常桶有一个溢出桶。
- 这里值得注意的是,buckets 的长度被设为 2 的幂,即
len(buckets) = 2^B,原因是后面哈希函数需要根据 B 来定位 buckets。 - 正常桶最多存储 8 个键值对,多余的存储在溢出桶,溢出桶也是 8 个满一桶。
- 从结构上看,tophash -> keys[x] -> values[x]
- 8 位的 tophash 字段的作用:
- 当 K-V 对存在时,tophash 存储 hash(key) 的高 8 位。
- 当 K-V 对不存在时,tophash 存储 K-V 的位置状态。
问题:如何保证 hash(key) 的高 8 位一定不小于 5 呢?
解决:当 hash(key) 的高 8 位小于 5 时,会加上 minTopHash 作为最终的 tophash
哈希函数
在程序启动时,会检测 cpu 是否支持 aes,如果支持,则使用 aes hash,否则使用 memhash。
哈希冲突
想要了解哈希冲突是怎么发生的,首先要知道 key 是怎么定位的。
key 的定位过程(查找)
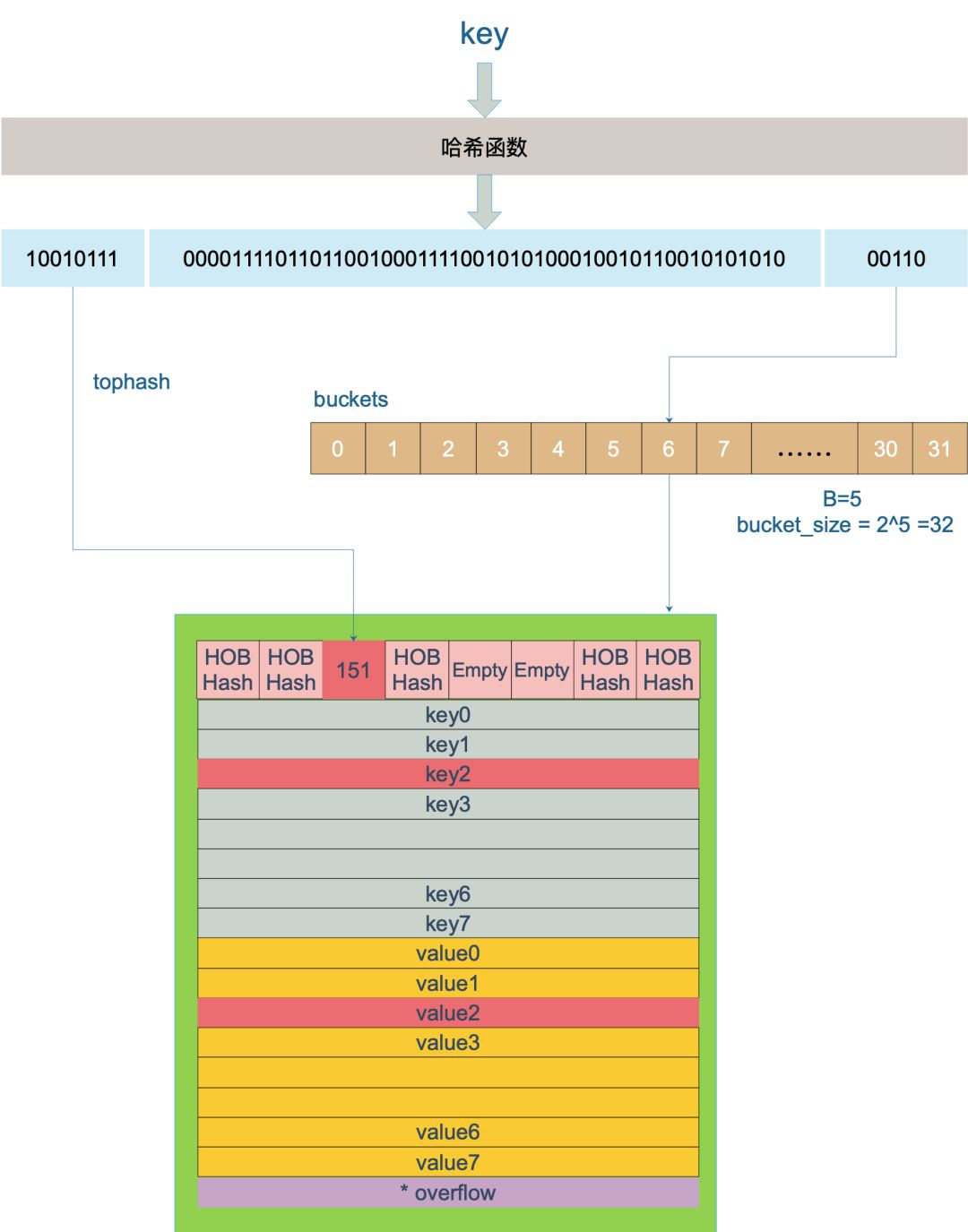
- 首先通过哈希函数计算出 64 位二进制值;
- 然后根据 B 的大小,取后 B 位为 buckets 数组的索引,访问桶;
- 在桶内根据高 8 位 tophash 匹配 key。
冲突发生与解决
从 key 的定位过程可以看出,当 key 经过哈希函数被分配到同一个桶里,就发生了哈希冲突,这时会遍历桶找到空位,若无空位则放到溢出桶。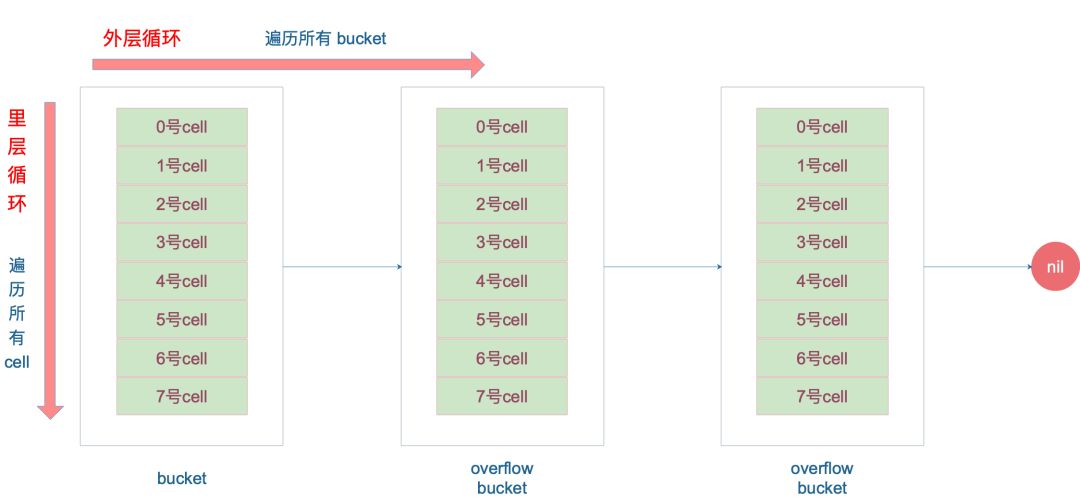
增删查改
大致说明一下插入,删除,查找,修改四个操作的大致过程,这四个过程都基于查找,详见哈希冲突部分中 key 的定位过程。
插入
- 在定位正常桶之后,会遍历比较已有的 key 查看 key 是否已存在;
- 当正常桶未满,若不存在,则将其放到遍历过程中遇到的第一个空位上;若已存在,则修改对应的 value;
- 若桶已满,在溢出桶重复以上操作。
- 若恰好正常桶和溢出桶都满了,就多开一个溢出桶。
以上只是大致过程,
实际上在插入过程中,还会根据 flags 字段判断是否有其他 goroutine 也在对 map 进行写操作,是的话会直接 panic,所以 map 是线程不安全的。
此外,还涉及扩容。
删除
- 定位正常桶;
- 遍历寻找 key;
- 将对应的 value 置为 nil,修改 tophash 的状态。
实际上删除前,也会根据 flags 字段判断是否有其他 goroutine 也在对 map 进行写操作,是的话会直接 panic。
tophash 六种状态的含义与作用
minTopHash
含义:当 K-V 对存在时,hash(key) 高 8 位的最小值是 5,因此当 tophash < 5 时表示 K-V 不存在,当 tophash >= 5 时表示 K-V 不存在。
如何保证 hash(key) 高 8 位不小于 5 呢?
// 源码解决func tophash(hash uintptr) uint8 {top := uint8(hash >> (sys.PtrSize*8 - 8))if top < minTopHash {top += minTopHash}return top}
emptyRest
含义:不仅当前的 K-V 位置可用,其后的 K-V 位置均可用
赋值:
- 初始化每个 tophash 都为 emptyRest
- 删除 K-V 对时会判断 tophash 是否应该置为 emptyRest
作用:
- 判断 bmap 是否为空,当 tophash[0] = emptyRest 时,说明 bmap 是空的。
- 提前结束 bmap 遍历,当遍历到某位置时发现 tophash[i] = emptyRest 则可结束遍历。
emptyOne
含义:当前的 K-V 位置可用,不知其后的 K-V 位置是否可用
赋值:
- 删除 K-V 对时会先令 tophash = emptyOne
作用:
- 判断 bmap 是否为空,当 tophash[0] = emptyRest 时,说明 bmap 是空的。
- 提前结束 bmap 遍历,当遍历到某位置时发现 tophash[i] = emptyRest 则可结束遍历。
evacuatedX & evacuatedY
含义:扩容后,元素被分配到了 X 部分还是 Y 部分,下图是翻倍扩容,新桶容量是酒桶容量的两倍,因此可以划分为 X, Y 两个部分。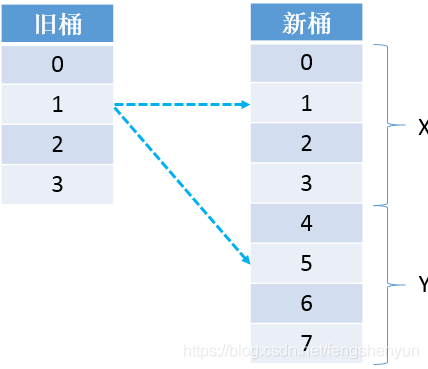
evacuatedEmpty
含义:扩容完成后,旧桶上所有的 tophash 都被置为 evacuatedEmpty
修改
先查找,找到 key 了就修改对应的 value
扩容策略
扩容过程不是原子的。
装载因子与扩容时机
在 go 的 map 中,装载因子定义为 loadFactor := count /(2^B),即元素个数除以桶的个数。
扩容的两个条件如下:
loadFactor >= 6.5触发翻倍扩容。- 溢出桶太多触发等量扩容
等量扩容
为什么会出现大量溢出桶?原因很简单,先大量插入,然后删除,再插入,产生大量溢出桶,但没有满足条件一触发翻倍扩容。溢出桶太多,使得 key 很分散,查找效率低。(一个大城市,住户却很少)
解决:新开一个桶(可能也需要溢出桶),把原来正常桶和溢出桶的有效 K-V 对搬进来,使得排列紧密。
翻倍扩容
loadFactor >= 6.5 说明一个桶里平均有 6-7 个元素,桶太少了。
此时 B = 1,使得桶的数量翻倍。
一个桶内的元素会被分配到两个桶中。

若有收获,就点个赞吧
0 人点赞
