在math文件夹下,有许多基础的几何体,其中包括 Box , Line 等,同时,还有一些比如抽象几何体将其列入,比如 Ray 。这次就来看看这部分的源码。
Line3
Three中对line的表示应该就是两个点:起点和终点,都是vec3的格式。本体是很简单的,不过给这个类添加了好多方法,就还是有一百来行的代码。这其中,大部分的代码是对两个vec3操作的包装,比如计算终点,计算delta,计算长度,计算线上一点的坐标等等,比较常规。
closestPointToPoint
这个函数计算直线上距离某点最近的点,在某些情形下做计算的时候会比较有用。这个函数首先求出参数 t ,进而根据参数和两个端点得到坐标。
closestPointToPointParameter
closestPointToPointParameter: function ( point, clampToLine ) {_startP.subVectors( point, this.start );_startEnd.subVectors( this.end, this.start );var startEnd2 = _startEnd.dot( _startEnd );var startEnd_startP = _startEnd.dot( _startP );var t = startEnd_startP / startEnd2;if ( clampToLine ) {t = _Math.clamp( t, 0, 1 );}return t;}
计算参数t,稍微看下源码画个图应该还是知道的,得到投影,然后除以总长度就得到了。
Plane
平面的表示,比较符合直觉,用平面的法线和一个常数表示,文档里提到:http://mathworld.wolfram.com/HessianNormalForm.html。对于方程: ,有常数
,有常数 ,如果a, b, c都是归一化的,就是这里的d了。
,如果a, b, c都是归一化的,就是这里的d了。
setFromNormalAndCoplanarPoint
平面的法线和平面上一点表示平面,反求d,只要做个点乘取负就可以了。
setFromCoplanarPoints
三点确定一条直线。先用叉乘得到法线,然后通过法线和点就可以得到平面了。
distanceToPoint
点到平面的距离。其实就是代入方程,如果没有归一化的话还需要归一化,如此简洁的表示,但是自己经常会忘掉。
projectPoint
点投影在平面上的点,平面上距离某点最近的点。
return target.copy( this.normal ).multiplyScalar( - this.distanceToPoint( point ) ).add( point );
这个代码也很省事啊,把这个点往法线负方向偏移到平面距离的长度就到平面上了。
applyMatrix4
对平面应用变换。不过由于对于平面应用变换的时候,不能只考虑几何体,还有它的法线信息,对平面上的点应用变换矩阵,对法线应用法线的变换矩阵。关于法线的变换矩阵如何得到见源码阅读#1里的内容。
intersectLine
找出与平面交点。这个还是有些trick的。思想还是参数表示吧。在实现的时候多使用向量的一些操作,比如点乘这样的来节省运算开销。
intersectsLine
判断是否相交 这个不用找交点,只用考虑直线点的两端是不是在平面的两侧就OK了。
剩下的 intersectsBox 和 intersectsSphere 留到对应的源码里再说。
Box2
平面上的一个矩形。用两个 vector2 来表示:min和max,可以理解成,左下角的点和右上角的点
这样表示有一定的便利,比如,其对应的进行expand时候,就特别方便:
expandByPoint: function ( point ) { // 包含所有的点
this.min.min( point );
this.max.max( point );
return this;
},
expandByVector: function ( vector ) {
this.min.sub( vector );
this.max.add( vector );
return this;
},
expandByScalar: function ( scalar ) {
this.min.addScalar( - scalar );
this.max.addScalar( scalar );
return this;
},
另一种表示方式是center和size的表示,也是两个vector2,两者的转化也相对比较直观。
getParameter
getParameter: function ( point, target ) {
return target.set(
( point.x - this.min.x ) / ( this.max.x - this.min.x ),
( point.y - this.min.y ) / ( this.max.y - this.min.y )
);
},
这个API还是挺奇怪的,点在box中的参数表示,以min为零点,然后范围是0-1
intersectsBox
intersectsBox: function ( box ) {
return box.max.x < this.min.x || box.min.x > this.max.x ||
box.max.y < this.min.y || box.min.y > this.max.y ? false : true;
},
九块区域,保证不相交的判断方式,应该是比较高效的了。
distanceToPoint
distanceToPoint: function ( point ) {
var clampedPoint = _vector.copy( point ).clamp( this.min, this.max );
return clampedPoint.sub( point ).length();
},
计算box到点的距离还是很巧妙的,先找到平面上的clamp point,两个一连的长度就是了。
这种min,max表示,在计算expand,计算clamp,以及计算intersect和union,都是比较方便的。
Triangle
最基础的二维物体,一半越基础,需要支持的操作也越多。
表示的话,就是三个顶点,比较直观。
在代码组织方面,有些方法名,比如 getNormal , getUV 等,分别在Triangle的属性和Triangle的原型上都写到了。在原型上的方法基本上调用属性的,相当于是一种静态方法吧。可能因为这样的函数有时候会在其它地方用到,这样不需要 this ,可以作为个静态方法来使用。
先来看几个静态方法,应该是一些基础的。
getNormal 比较常规,叉乘下就有了。
getBarycoord
重心坐标!https://zh.wikipedia.org/wiki/%E9%87%8D%E5%BF%83%E5%9D%90%E6%A0%87
源码附带的参考已经讲得很详细了:https://blackpawn.com/texts/pointinpoly/default.html
主要是数学运算,自己也不想推导,知道思想就OK了,尤其是重心坐标的表示形式。
containsPoint
这就是重心坐标的优越性了。保证三个分量都>=0.
getUV
TODO: 这个也不明白,文档里也没有说,也没有看到源码其它地方用到,到时候再看
**
isFrontFacing
判断是不是向前的面,其实就是三角形三个顶点确定的顺序,是不是和三角形的direction正负号相同。
然后看值得注意的对象的属性,也就是原型上的方法。
getArea
求面积,叉乘出来的向量模长就是两个向量张成的平行四边形的面积,除以二即可。
closestPointToPoint
跟平面不同,需要考虑是不是在点上或者在边上,因此需要分情况讨论,在判断是否在点或边上的时候用到很多trick,看来实现效率还是要花费一番功夫的。
判断在边上还是不够明白,但是能够理解思想就可以了。
closestPointToPoint: function ( p, target ) {
var a = this.a, b = this.b, c = this.c;
var v, w;
// algorithm thanks to Real-Time Collision Detection by Christer Ericson,
// published by Morgan Kaufmann Publishers, (c) 2005 Elsevier Inc.,
// under the accompanying license; see chapter 5.1.5 for detailed explanation.
// basically, we're distinguishing which of the voronoi regions of the triangle
// the point lies in with the minimum amount of redundant computation.
_vab.subVectors( b, a );
_vac.subVectors( c, a );
_vap.subVectors( p, a );
var d1 = _vab.dot( _vap );
var d2 = _vac.dot( _vap );
if ( d1 <= 0 && d2 <= 0 ) {
// vertex region of A; barycentric coords (1, 0, 0)
return target.copy( a );
}
_vbp.subVectors( p, b );
var d3 = _vab.dot( _vbp );
var d4 = _vac.dot( _vbp );
if ( d3 >= 0 && d4 <= d3 ) {
// vertex region of B; barycentric coords (0, 1, 0)
return target.copy( b );
}
var vc = d1 * d4 - d3 * d2;
if ( vc <= 0 && d1 >= 0 && d3 <= 0 ) {
v = d1 / ( d1 - d3 );
// edge region of AB; barycentric coords (1-v, v, 0)
return target.copy( a ).addScaledVector( _vab, v );
}
_vcp.subVectors( p, c );
var d5 = _vab.dot( _vcp );
var d6 = _vac.dot( _vcp );
if ( d6 >= 0 && d5 <= d6 ) {
// vertex region of C; barycentric coords (0, 0, 1)
return target.copy( c );
}
var vb = d5 * d2 - d1 * d6;
if ( vb <= 0 && d2 >= 0 && d6 <= 0 ) {
w = d2 / ( d2 - d6 );
// edge region of AC; barycentric coords (1-w, 0, w)
return target.copy( a ).addScaledVector( _vac, w );
}
var va = d3 * d6 - d5 * d4;
if ( va <= 0 && ( d4 - d3 ) >= 0 && ( d5 - d6 ) >= 0 ) {
_vbc.subVectors( c, b );
w = ( d4 - d3 ) / ( ( d4 - d3 ) + ( d5 - d6 ) );
// edge region of BC; barycentric coords (0, 1-w, w)
return target.copy( b ).addScaledVector( _vbc, w ); // edge region of BC
}
// face region
var denom = 1 / ( va + vb + vc );
// u = va * denom
v = vb * denom;
w = vc * denom;
return target.copy( a ).addScaledVector( _vab, v ).addScaledVector( _vac, w );
}
**
Box3
可以从box2自然扩充到box3,不过由于加了个维度,好多操作会变复杂。
因为 Box3 这个结构在三维世界里用到很多,比如物体的AABB包围盒,因此还是有很多的和其他模块关联的地方。
比如,有 setFromBufferAttribute 函数,直接从buffer设置,提升效率。
expandByObject
通过物体张成,那其实就是物体的AABB包围盒。
思想还是简单的,就是物体的所有点张成。不过需要考虑空间的变换,这个具体的相关的变换应该在object相关代码里边,先留下TODO:
object.updateWorldMatrix( false, false ); // TODO: word matrix
在取所有点之前,先调用这个函数,不知道作用是什么,等看了源码再补上,光看文档https://threejs.org/docs/index.html#api/en/core/Object3D.updateWorldMatrix,也不是很清楚。
intersectsSphere
intersectsSphere: function ( sphere ) {
// Find the point on the AABB closest to the sphere center.
this.clampPoint( sphere.center, _vector );
// If that point is inside the sphere, the AABB and sphere intersect.
return _vector.distanceToSquared( sphere.center ) <= ( sphere.radius * sphere.radius );
},
clamp操作真滴好用,原来这样做判断与球相交。
intersectsPlane
intersectsPlane: function ( plane ) {
// We compute the minimum and maximum dot product values. If those values
// are on the same side (back or front) of the plane, then there is no intersection.
var min, max;
if ( plane.normal.x > 0 ) {
min = plane.normal.x * this.min.x;
max = plane.normal.x * this.max.x;
} else {
min = plane.normal.x * this.max.x;
max = plane.normal.x * this.min.x;
}
if ( plane.normal.y > 0 ) {
min += plane.normal.y * this.min.y;
max += plane.normal.y * this.max.y;
} else {
min += plane.normal.y * this.max.y;
max += plane.normal.y * this.min.y;
}
if ( plane.normal.z > 0 ) {
min += plane.normal.z * this.min.z;
max += plane.normal.z * this.max.z;
} else {
min += plane.normal.z * this.max.z;
max += plane.normal.z * this.min.z;
}
return ( min <= - plane.constant && max >= - plane.constant );
},
这里边的计算还是需要值得注意的。

参考:http://what-when-how.com/advanced-methods-in-computer-graphics/collision-detection-advanced-methods-in-computer-graphics-part-3/
从上图看,其实就是检测,是不是所有的点都在一侧。这个,由于box的几何属性,只要找到距离平面最远的点,以及其对角线的点,判断两个是不是在图片的同侧就可以了。
所以源码中的种种正负值的判断也就清楚了,因为min和max两个点的坐标就包含了所有的8个点的分量,相互组合可以找到所有的点。 ,其中p就是最远的点,因为max中的坐标值永远比min里的坐标大,所以就可以通过法线正负值,找到最远的点和对应的对角点。
,其中p就是最远的点,因为max中的坐标值永远比min里的坐标大,所以就可以通过法线正负值,找到最远的点和对应的对角点。
intersectsTriangle
intersectsTriangle: function ( triangle ) {
// compute box center and extents
this.getCenter( _center );
_extents.subVectors( this.max, _center );
// translate triangle to aabb origin
_v0.subVectors( triangle.a, _center );
_v1.subVectors( triangle.b, _center );
_v2.subVectors( triangle.c, _center );
// compute edge vectors for triangle
_f0.subVectors( _v1, _v0 );
_f1.subVectors( _v2, _v1 );
_f2.subVectors( _v0, _v2 );
// test against axes that are given by cross product combinations of the edges of the triangle and the edges of the aabb
// make an axis testing of each of the 3 sides of the aabb against each of the 3 sides of the triangle = 9 axis of separation
// axis_ij = u_i x f_j (u0, u1, u2 = face normals of aabb = x,y,z axes vectors since aabb is axis aligned)
var axes = [
0, - _f0.z, _f0.y, 0, - _f1.z, _f1.y, 0, - _f2.z, _f2.y,
_f0.z, 0, - _f0.x, _f1.z, 0, - _f1.x, _f2.z, 0, - _f2.x,
- _f0.y, _f0.x, 0, - _f1.y, _f1.x, 0, - _f2.y, _f2.x, 0
];
if ( ! satForAxes( axes, _v0, _v1, _v2, _extents ) ) {
return false;
}
// test 3 face normals from the aabb
axes = [ 1, 0, 0, 0, 1, 0, 0, 0, 1 ];
if ( ! satForAxes( axes, _v0, _v1, _v2, _extents ) ) {
return false;
}
// finally testing the face normal of the triangle
// use already existing triangle edge vectors here
_triangleNormal.crossVectors( _f0, _f1 );
axes = [ _triangleNormal.x, _triangleNormal.y, _triangleNormal.z ];
return satForAxes( axes, _v0, _v1, _v2, _extents );
}
function satForAxes( axes, v0, v1, v2, extents ) {
var i, j;
for ( i = 0, j = axes.length - 3; i <= j; i += 3 ) {
_testAxis.fromArray( axes, i );
// project the aabb onto the seperating axis
var r = extents.x * Math.abs( _testAxis.x ) + extents.y * Math.abs( _testAxis.y ) + extents.z * Math.abs( _testAxis.z );
// project all 3 vertices of the triangle onto the seperating axis
var p0 = v0.dot( _testAxis );
var p1 = v1.dot( _testAxis );
var p2 = v2.dot( _testAxis );
// actual test, basically see if either of the most extreme of the triangle points intersects r
if ( Math.max( - Math.max( p0, p1, p2 ), Math.min( p0, p1, p2 ) ) > r ) {
// points of the projected triangle are outside the projected half-length of the aabb
// the axis is seperating and we can exit
return false;
}
}
return true;
}
这个计算box和三角形的相交应该是最复杂的一个了。
首先减去center,消除box和triangle的偏移,便于处理。
然后这里用到了一个 satForAxes ,先来看一下。
SAT(Separating Axis Theorem)是一种用来检测是否相交的方法,见:http://www.dyn4j.org/2010/01/sat/
它可以用来检测两个凸包是否相交。思想是,如果能找到一个轴,使两个凸包到该轴的投影没有交集,那么就不相交,反之两者相交。
比如: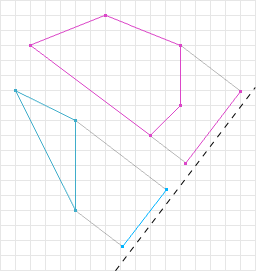
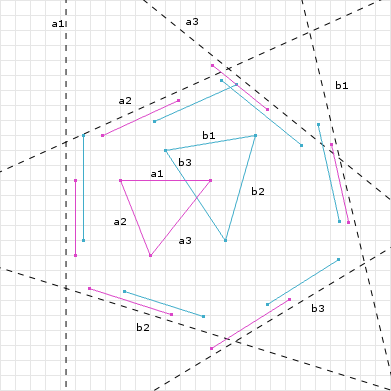
左图找到了一个轴,两个投影不相交,右图找不到这样的轴。
具体如何实现呢,我们看源码中怎么写的。
首先计算r,就是半径所在区间。然后接下来,计算三个点的投影。
这里需要注意一点,看:
if ( Math.max( - Math.max( p0, p1, p2 ), Math.min( p0, p1, p2 ) ) > r )
这个判断条件看了半天没有明白,其实,就是为了保证,不管正负,最小的绝对值肯定要大于r,这里其实还挺误解的,为什么不直接用 Math.abs() ,但其实法线,这个能保证,如果三个值里有正有负,能保证左边一定是小于零,此时条件不成立,因为extent投影的区间是[0,r],所以,还是很精妙的。
要测试box和三角形是否有交点,就是疯狂的找出这样的轴了,能找到就说明不相交。这里选择了三种轴:
- 3个坐标轴和3条边叉乘出来的9个
- 3个坐标轴
- 三角形的法线
不过为啥这些就覆盖了所有的可能性呢?
TODO:搞不懂
参考:
https://gdbooks.gitbooks.io/3dcollisions/content/Chapter4/aabb-triangle.html
https://gamedevelopment.tutsplus.com/tutorials/collision-detection-using-the-separating-axis-theorem—gamedev-169
Sphere
看完box这个三维物体之后,后续的可能都会简单一点。
圆心坐标和半径,表示上应该没有疑问。
setFromPoints
根据点得到求的方程,应该是包含所有点的球。
setFromPoints: function ( points, optionalCenter ) {
var center = this.center;
if ( optionalCenter !== undefined ) {
center.copy( optionalCenter );
} else {
_box.setFromPoints( points ).getCenter( center );
}
var maxRadiusSq = 0;
for ( var i = 0, il = points.length; i < il; i ++ ) {
maxRadiusSq = Math.max( maxRadiusSq, center.distanceToSquared( points[ i ] ) );
}
this.radius = Math.sqrt( maxRadiusSq );
return this;
}
引用文档中的话:
Computes the minimum bounding sphere for an array of points. If optionalCenteris given, it is used as the sphere’s center. Otherwise, the center of the axis-aligned bounding box encompassing points is calculated.
所以其实并不算是真正的包围球,center可能不是最优的。

若有收获,就点个赞吧
0 人点赞
