论文地址:A survey of motion planning and control techniques for self-driving urban vehicles
介绍
自动驾驶分级:L0-L5(SAE J3016标准)
L0: 无自动 L1:基本驾驶辅助,如:防抱死制动系统 L2:高级辅助,如:危险最小化纵向/横向控制,紧急制动 L3:具体条件下可以自动驾驶,但是让然需要人工操作 L4:具体条件下尅完全自动驾驶,操作员控制失效时可以保持安全控制 L5:全自动
本论文聚焦点:决策,运动规划和控制(>L3)
决策主要包括:route planning, behavioral decision making, local motion planning and feedback control (路线规划,行为决策,运动控制,反馈控制)
决策概述
决策系统架构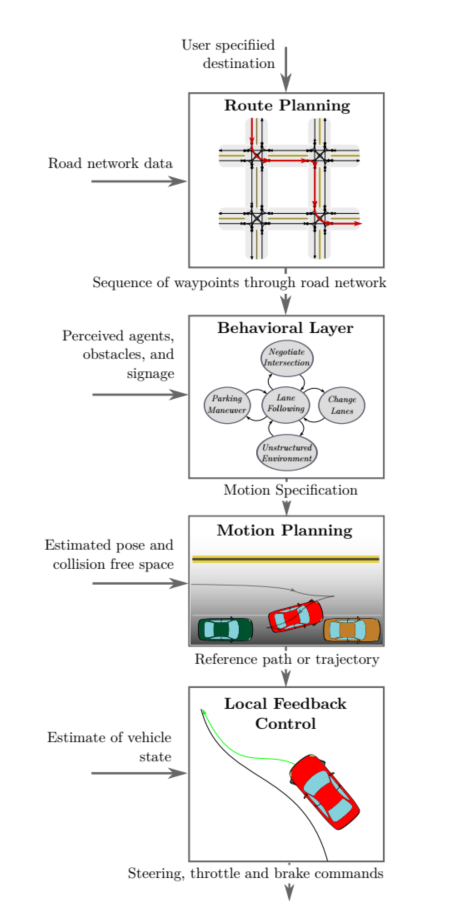
- 路线规划-Route Planning
使用有向图表示路网,决策系统需要从当前位置到目标位置选择一个Route,使得代价最小;经典的最小路径算法包括:Dijkstra,A*算法
行为决策-Behavior decision making
运动规划-motion planning
控制-vehicle control
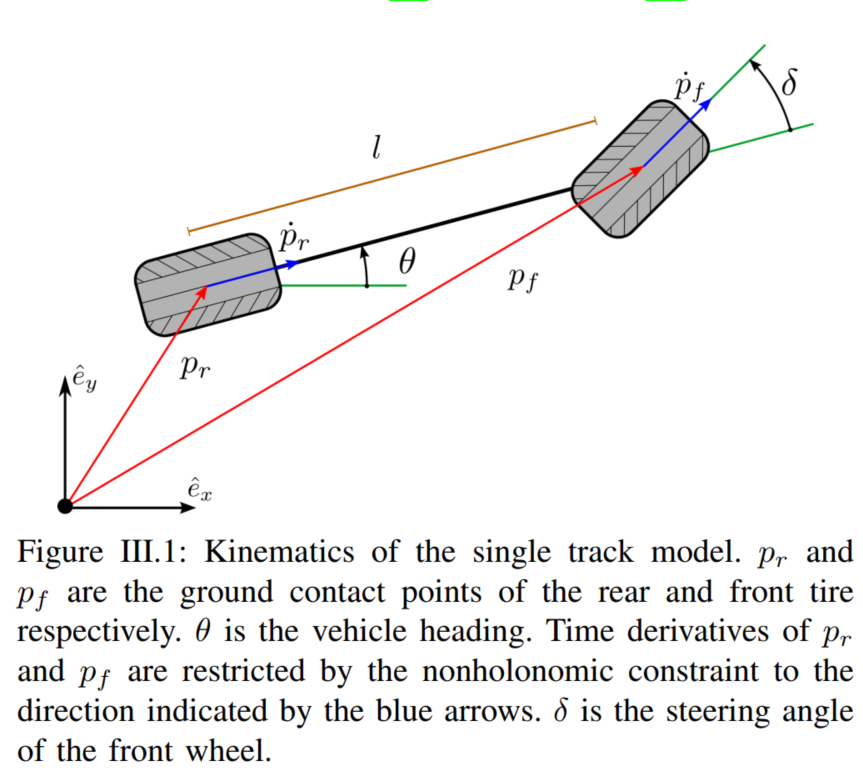
规划和控制模型
单轨运动学模型
惯性效应
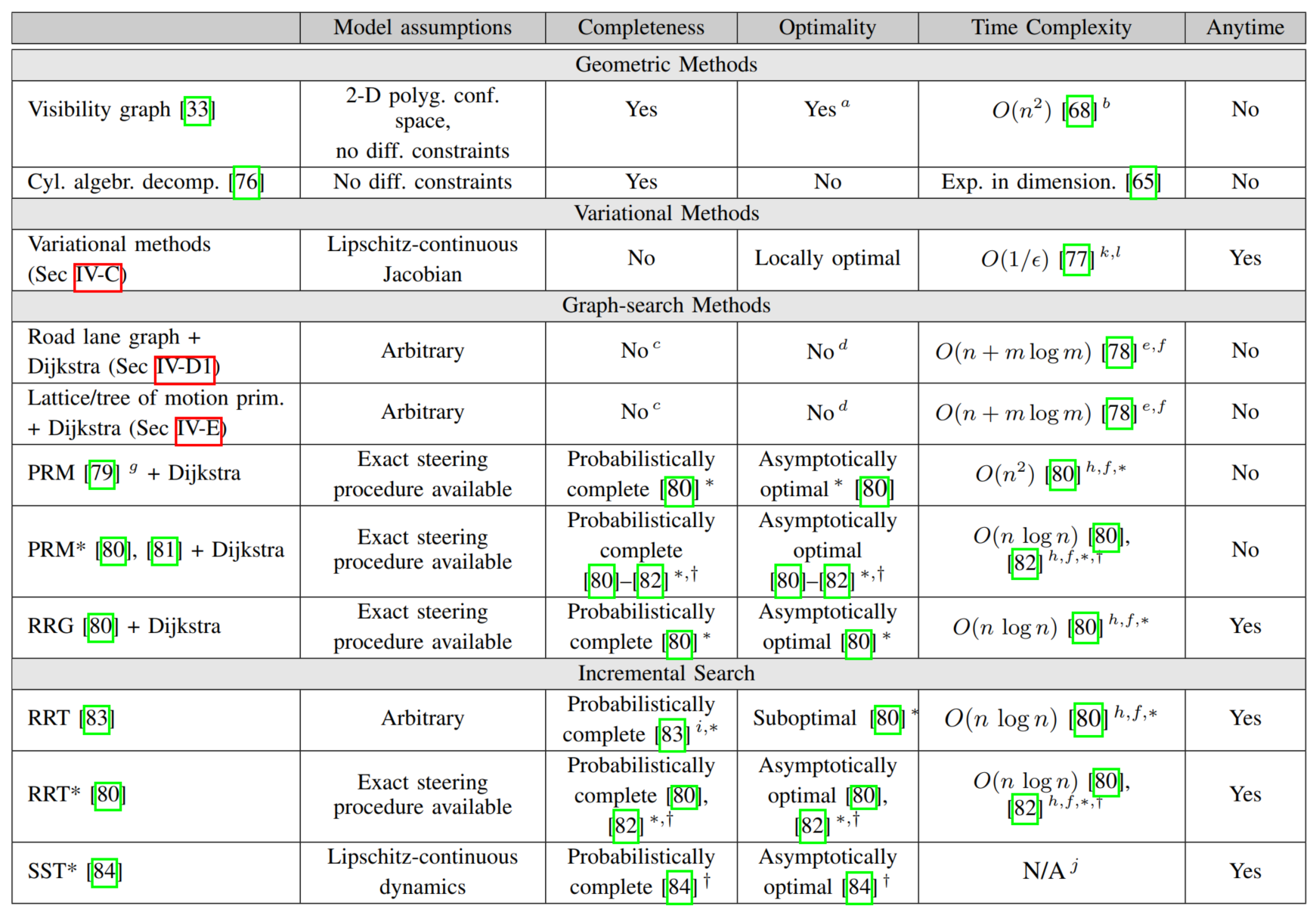
运动规划
控制

若有收获,就点个赞吧
0 人点赞
