论文地址:https://arxiv.org/pdf/1901.04407v1
一 摘要
自动驾驶系统可以分为感知系统和决策系统两个子系统;感知系统主要分为:(self-driving-car localization, static obstacles mapping, moving obstacles detection and tracking, road mapping, traffic signalization detection and recognition)定位、静态障碍物映射、动态障碍物检测和跟踪、道路测绘、交通信号检测和识别等,决策系统分为:(such as route planning, path planning, behavior selection, motion planning, and control)路线规划,路径规划,行为选择,运动规划和控制。
二 简介
自动驾驶领域的主要公司:Google, Uber, Baidu, Lyft, Aptiv, Tesla, Nvidia, Aurora, Zenuity, Daimler and Bosch, Argo AI, Renesas Autonomy, Almotive, AutoX, Mobileye, Ambarella, Pony.ai, Idriverplus, Toyota, Ford, Volvo, and Mercedes Benz
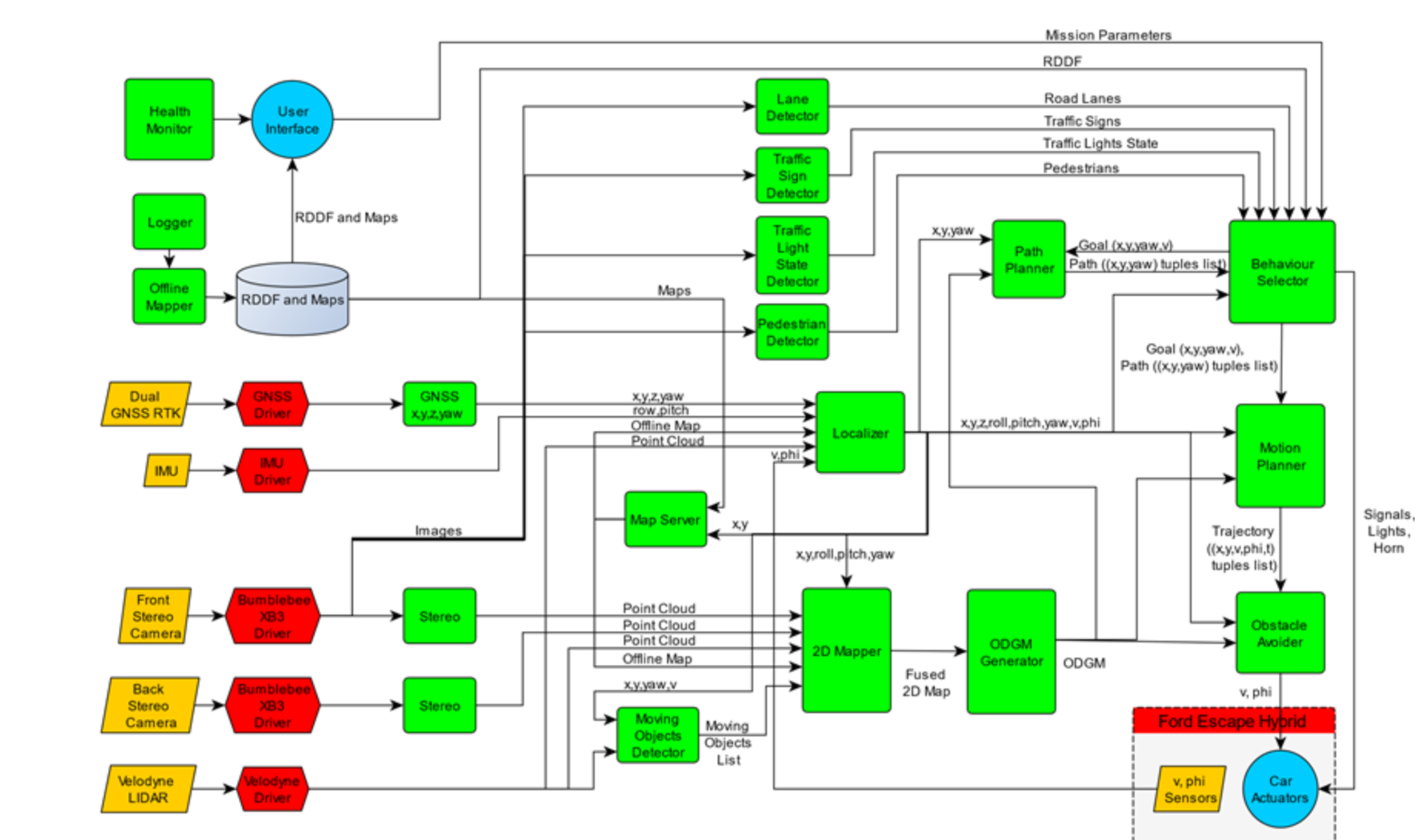
典型架构
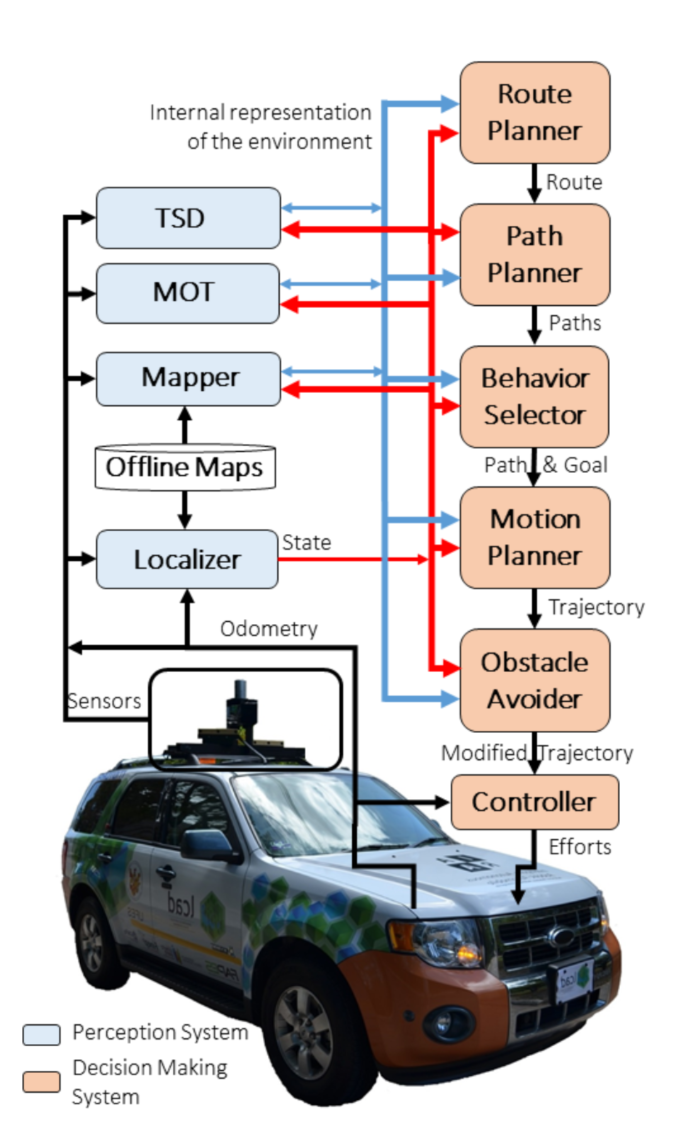
感知系统
- 从传感器(LIDAR,RADAR,相机,GPS,IMU等),路网,交规,汽车动力学收集数据
- 估计车辆的状态(State),建立汽车环境表示
决策系统
- 基于车辆当前状态(State)和环境表示,将车辆从初始位置导航到目标位置
定位系统(Localizer)
估计车辆的状态(State),包括:姿态,速度,角速度等
离线地图(Offline Maps)
在线地图(Mapper)
本质上是环境的一种表示
动态物体跟踪-MOT
交通信号检测-TSD
路线规划
从当前状态到最终目标规划出路径(Route)
路径规划
一系列路径,一个路径包含一系列的姿态(pose)
行为选择器(Behavior Selector)
选择当前驾驶行为,比如车道保持,交通灯处理;一般为几秒
运动规划(Motion Planner)
计算车辆从当前状态到目标状态的运动轨迹,包含一系列的运动指令
避障(Obstacle Avoider)
接收运动规划轨迹,做避障调整
控制器(Controller)
接收经过避障系统的调整后的运动规划轨迹,发送信号到执行器
三 感知
定位
地图
环境表示方法:
topological: 用graph表示环境,节点表示地点边表示地点之间的拓扑关系
metric:将环境分解为cell,分为常规间距和可变间距两种
常规间距常见的表示方法为:Occupancy Grid Map (OGM)
路线图
MOT
论文区分了六种方式:
traditional:传统,数据分割,数据关联,滤波
model based:基于模型,如:Data Driven Markov chain Monte Carlo (DD-MCMC)
stereo vision based:立体视觉,基于图像的颜色和深度信息
grid map based:网格图,
sensor fusion based:传感融合
deep learning based :深度学习,CNN,GOTURN
TSD
交通灯,交通信号,路面标线三种情况的检测和识别
四 决策
路线规划
最短路径算法:Dijkstra、A
实现上分为四类:
(i) goal-directed:A
(ii) separator-based
(iii) hierarchical
(iv) bounded-hop
路径规划
图搜索:Dijkstra, A-star, and A-star variants
插值曲线:
行为选择
运动规划
图搜索-graph search based
采样-sampling based
插值-interpolating curve based
数值优化-numerical optimization based methods
避障
控制
PID(Proportional Integral Derivative )
MPC(Model Predictive Control)
软/硬件

NEXT:
A survey of motion planning and control techniques for self-driving urban vehicles

若有收获,就点个赞吧
0 人点赞
