1.出行计划(202203-2 CSP)
问题描述
分析
对于一个计划的 进入场所,只要核酸检测时间q在区间
进入场所,只要核酸检测时间q在区间 就能满足。相对于在区间内的所有时刻做完核酸的可以完成的计划增加1.
就能满足。相对于在区间内的所有时刻做完核酸的可以完成的计划增加1.
对于所有n个计划,相当于求n次区间加法
m次查询相对当于访问最后的值。
问题就转换为了区间加法问题,采用差分数组的方式求解
证明
设初始从【1,20000】中时刻,去做核算能完成的计划数都为0
定义一个计划 的可行区间为
的可行区间为 ,其中
,其中
在可行区间做核酸的时刻都能满足计划 的要求,那么这些时刻能完成的计划数加1,对于n个计划,只需看时刻
的要求,那么这些时刻能完成的计划数加1,对于n个计划,只需看时刻
落在多少个可行区间中,就是能完成的计划数。换一个视角,只需让计划 可行区间对应的值都加上1即可。问题即是给定初值为0的【1,200000】的区间,和n个加法区间,每次让区间内的值加1,最后查询任意时刻的值。
可行区间对应的值都加上1即可。问题即是给定初值为0的【1,200000】的区间,和n个加法区间,每次让区间内的值加1,最后查询任意时刻的值。
代码
import itertoolsn,m,k=map(int,input().split())diff=[0]*(200100)for _ in range(n):t,c = map(int,input().split())early_time = max(0,t-k-c+1)late_time = max(0,t-k)diff[early_time]+= 1diff[late_time + 1] -=1num =list(itertools.accumulate(diff))query =[]for _ in range(m):q = int(input())query.append(q)for q in query:print(num[q])
解释
定义差分数组diff,由于 有可能为0,所以与0取最大值。
有可能为0,所以与0取最大值。
对于让区间内所有值+1,根据差分数组定义,只需让左端点+1,右端点后一项-1即可
最后计算原数组num,num下标i对于的值就是时刻i满足的计划数
复杂度分析
时间复杂度
 ,n个区间,一共
,n个区间,一共 ,
,
空间复杂度
 ,原数组
,原数组 ,
, 为最大时间长度
为最大时间长度
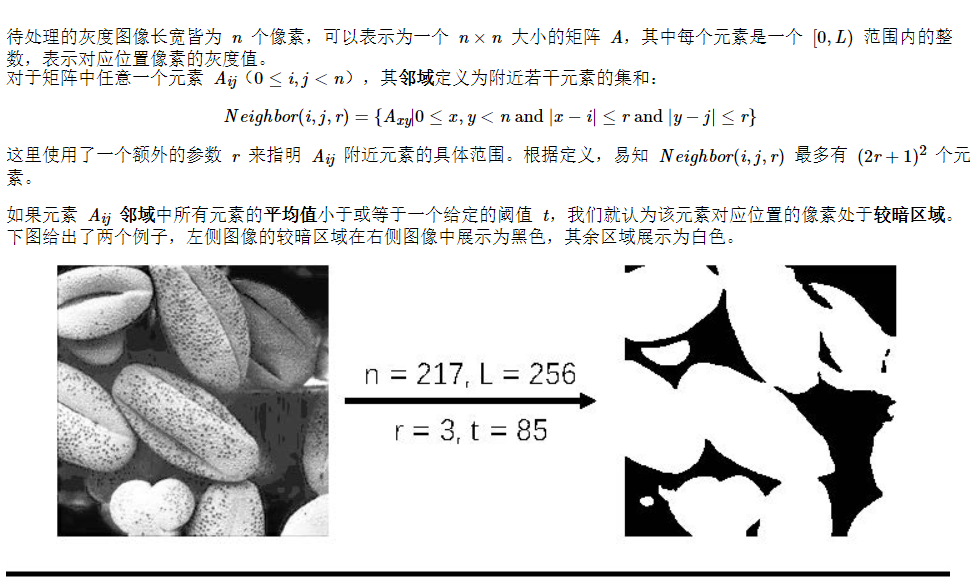
2.邻域均值(202104-2 CSP)
问题描述
分析
对于图像每一个像素点,要求所有领域的平均值,一种直观的想法外层两个for循环遍历图像,里层两个for循环计算领域。但是这样做时间复杂度太高,对于大图像会超时。考虑二维矩阵的前缀和。计算一个邻域时对前缀和进行操作而避免里层循环。
证明
对于一个二维矩阵A,定义坐标 前缀和
前缀和 ,那么
,那么 ,由此就可以计算出每个像素的领域和
,由此就可以计算出每个像素的领域和
前缀和的计算

代码
#include<iostream>using namespace std;int p[605][605]={0};int main(){int n,l,r,t;cin>>n>>l>>r>>t;for(int i=1;i<=n;i++){for(int j=1;j<=n;j++){int temp;cin>>temp;p[i][j]=p[i][j-1]+p[i-1][j]-p[i-1][j-1]+temp;}}int cnt=0;for(int i=1;i<=n;i++){for(int j=1;j<=n;j++){int left=max(1,j-r), right= min(n,j+r);int up = max(1,i-r),down=min(n,i+r);int sum=p[down][right]-p[down][left-1]-p[up-1][right]+p[up-1][left-1];if(sum<=t*(down-up+1)*(right-left+1)){cnt++;}}}cout<<cnt<<endl;return 0;}
解释
首先计算前缀和,然后遍历图像计算领域均值,如果领域均值大于阈值那么cnt计数+1,最后输出cnt
复杂度
时间复杂度
 ,遍历图像
,遍历图像 ,计算领域均值
,计算领域均值 ,整个算法
,整个算法
空间复杂度
前缀和数组

若有收获,就点个赞吧
0 人点赞
