1、排序算法 Sort
 1、排序算法的执行效率衡量指标
1、排序算法的执行效率衡量指标
- 最好情况、最坏情况、平均时间复杂度
- 时间复杂度的系数、常数、低接
- 比较次数和交换次数
2、内存消耗
原地排序:除了存储数据本身的空间,不需要额外的辅助存储空间
3、稳定性
稳定的排序算法: 如果待排序的序列中存在值相等的元素,经过排序之后,相等元素之间原有的先后顺序不变。
4、有序度:
数组中具有有序关系的元素对的个数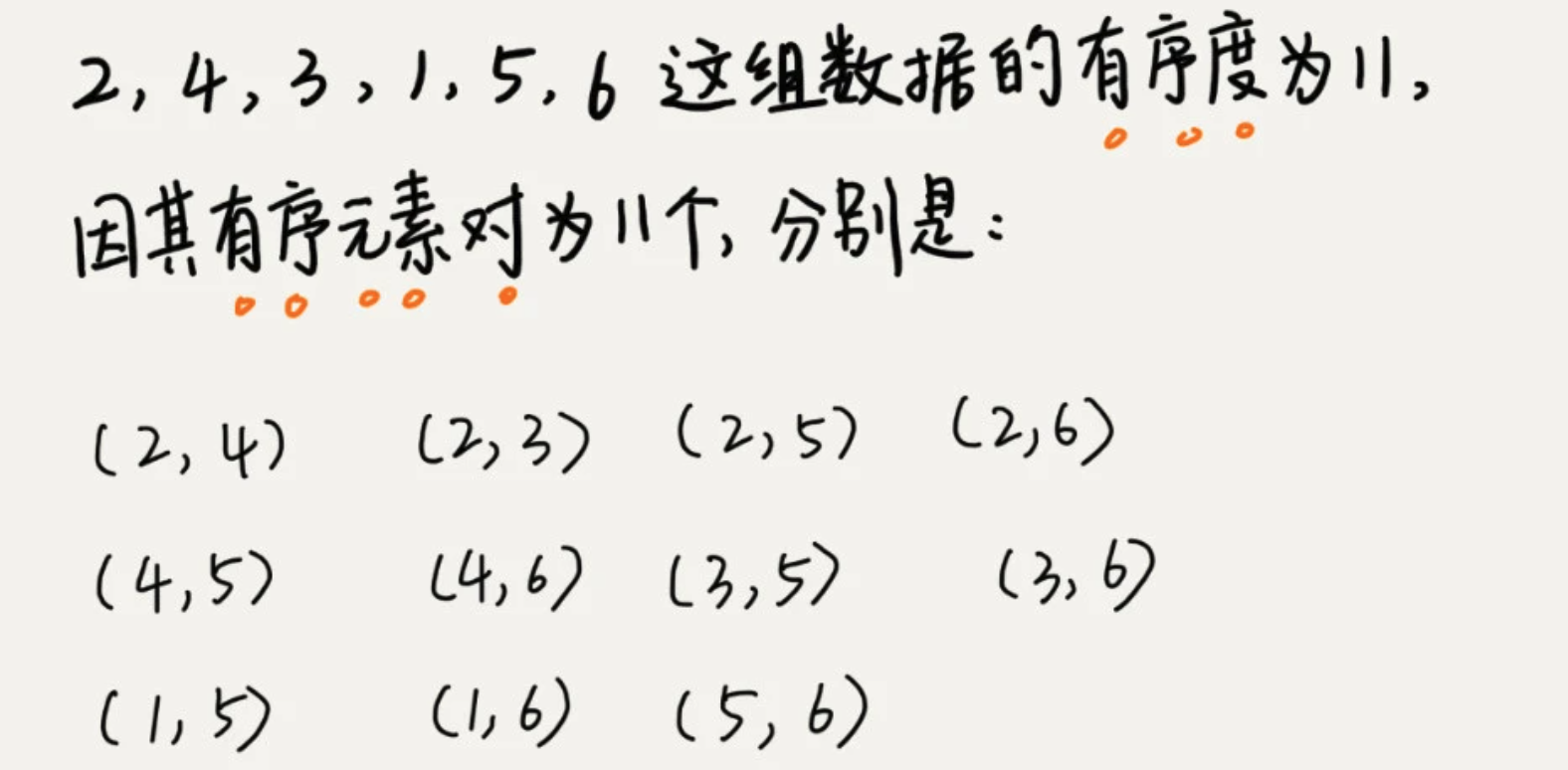
满有序度(完全有序的数组): n*(n-1)/2
逆序度 = 满有序度 - 有序度
1、冒泡排序 Bubble Sort
每次挨个对比相邻的两个元素,如果比后面的大,则交换位置。重复n次,排序完成。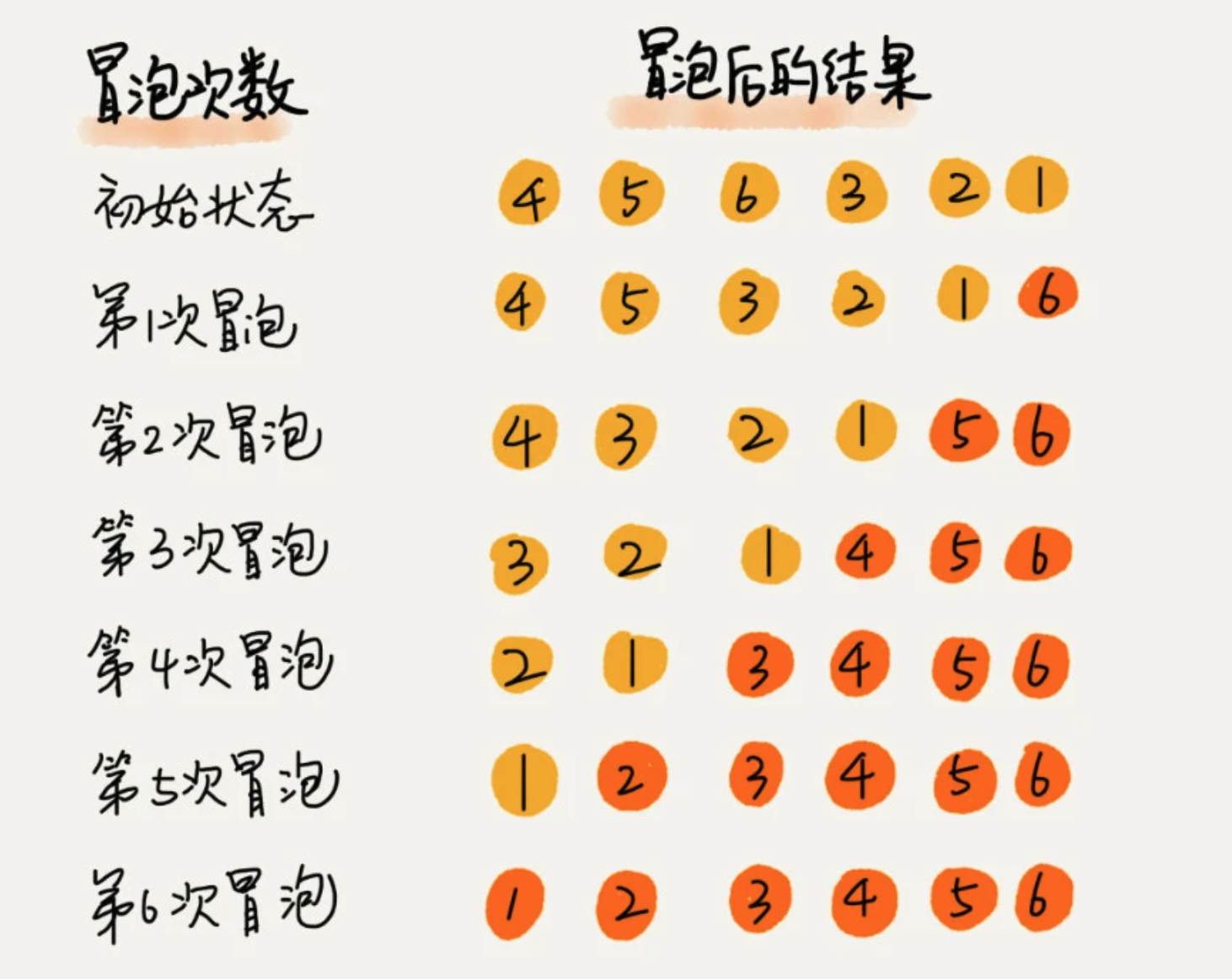
这个是正常情况下的冒泡次数,当某次冒泡没有数据交换时,说明已经完全有序,后面的冒泡操作可以不用继续。
def bubble_sort(alist):if len(alist) <= 1:returnfor i in range(0, len(alist)-1):flag = Falsefor j in range(0, len(alist)-1-i):if alist[j] < alist[j+1]:alist[j], alist[j+1] = alist[j+1], alist[j]flag = True# 如果当前冒泡已经达到满排序,直接退出if flag == False:break
- 原地排序算法:空间复杂度为O(1)
- 稳定排序算法:相邻两个元素相等时,不交换
-
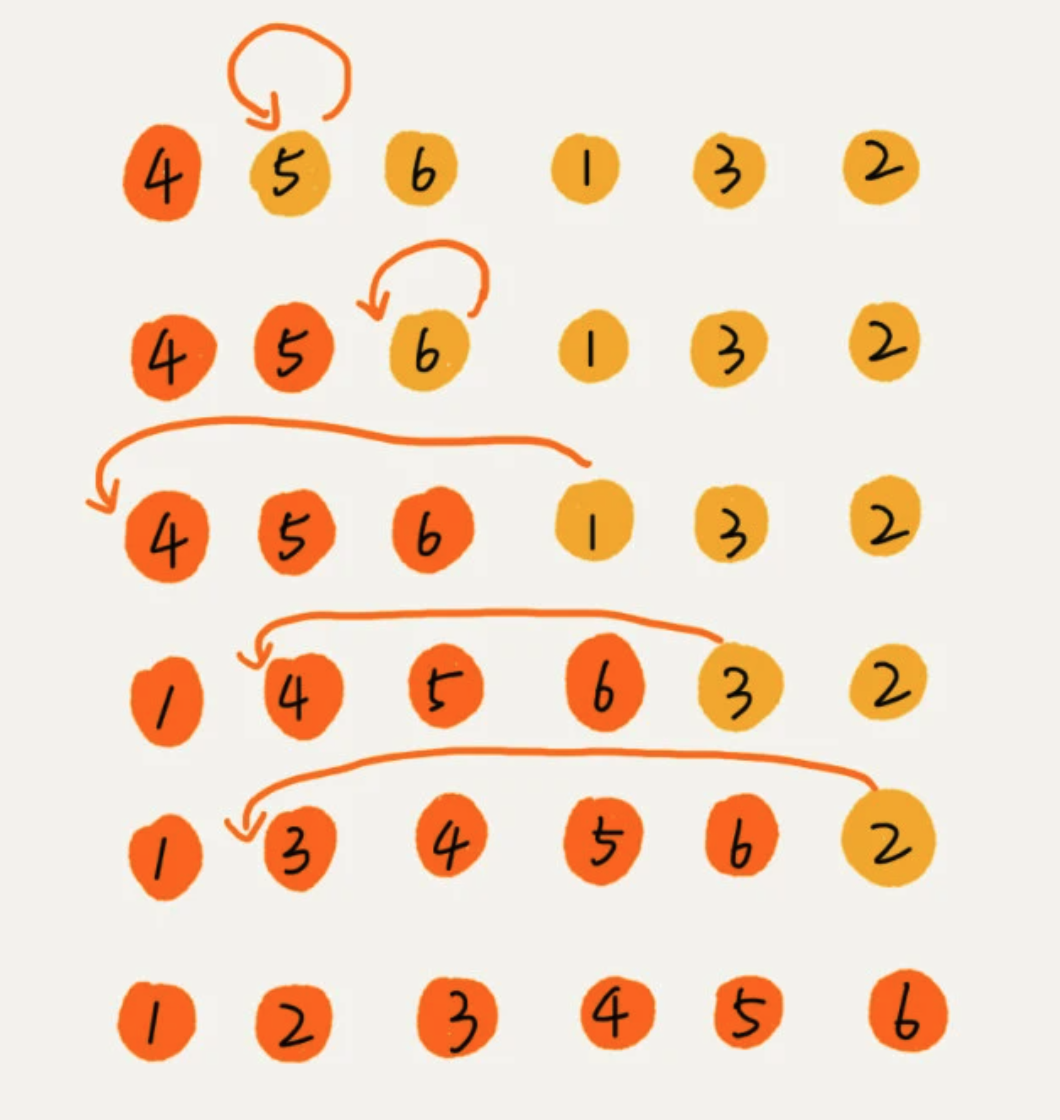
2、插入排序 Insertion Sort
将数组分为两个区间,已排序区间和未排序区间。初始已排序区间只有一个元素,就是数组的第一个元素。然后 取未排序区间中的元素,在已排序区间中找到合适的插入位置将其插入,并保证已排序区间的数据一直有序,重复这个过程,知道未排序区间中元素为空。
def insert_sort(alist):if len(alist) <= 1:returnfor i in range(1, len(alist)):# 对未排序区进行排序for j in range(i, 0, -1):if alist[j] > alist[j-1]:alist[j], alist[j-1] = alist[j-1], alist[j]else:break
原地排序算法:空间复杂度为O(1)
- 稳定排序算法:对于值相等的元素,未排序区出现的,插入到已排序区元素的后面,即位置不变
-
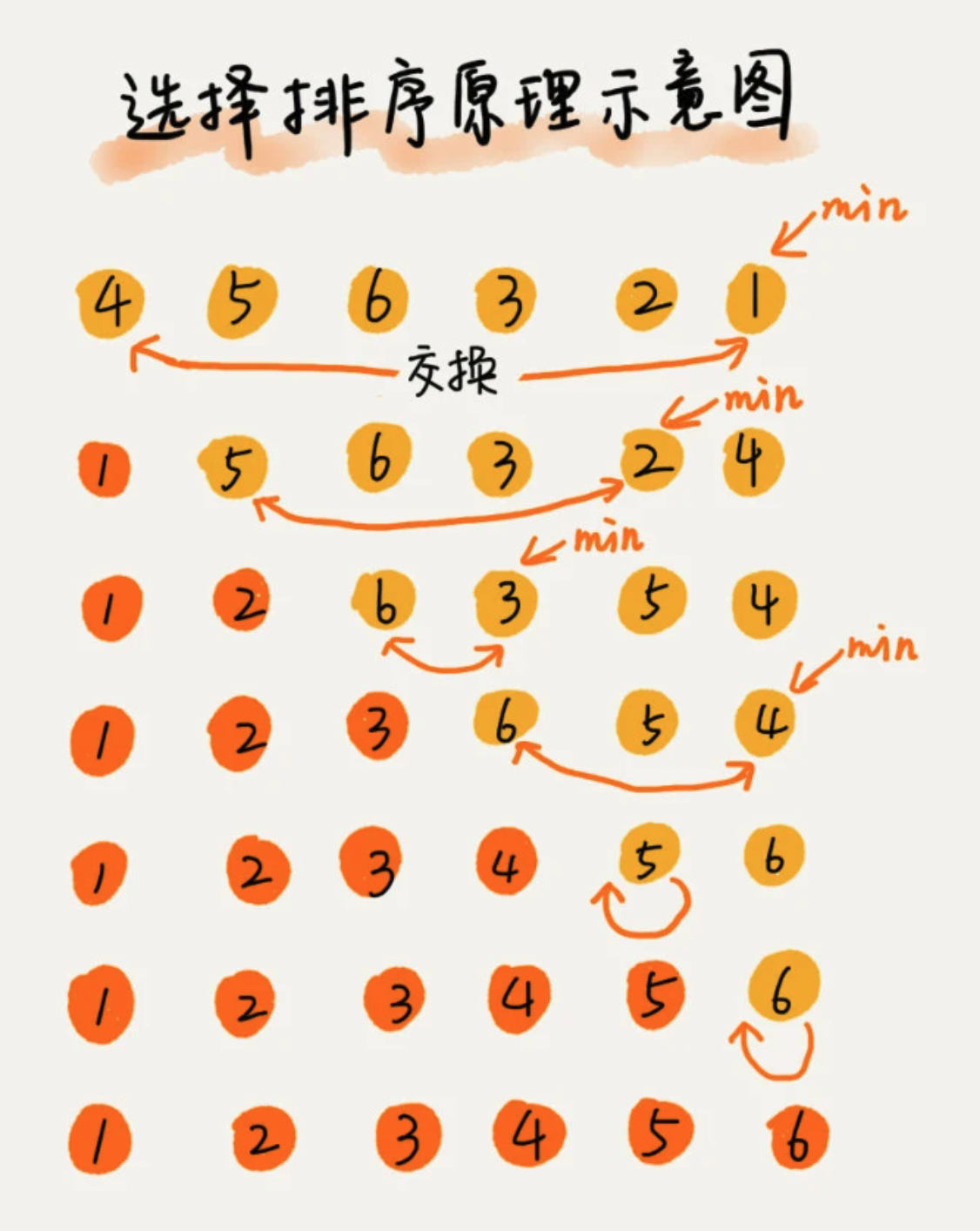
3、选择排序 Selection Sort
该排序算法,也分已排序区间和未排序区间。但选择排序每次会从未排序区间中找到最小元素,将其放在已排序区间的末尾。
def select_sort(alist):if len(alist) <= 1:returnfor i in range(0, len(alist)-1):min_index = ifor j in range(i+1, len(alist)):if alist[j] < alist[min_index]:min_index = jalist[i], alist[min_index] = alist[min_index], alist[i]
原地排序算法:空间复杂度为O(1)
- 不稳定排序算法:每次获取到最小元素,都需要和已排序区的最小元素位置发生互换
-
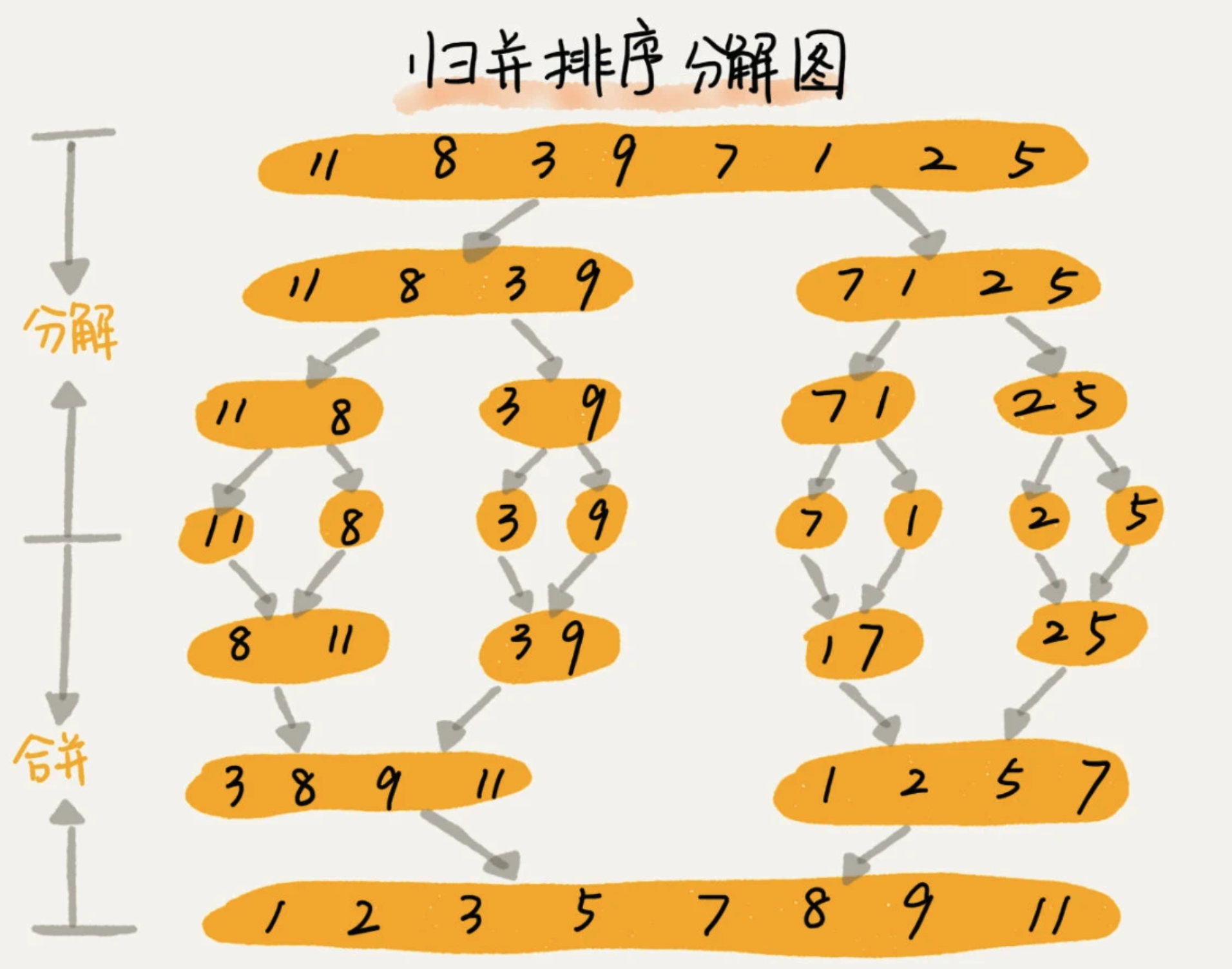
4、归并排序 Merge Sort
针对一个数组,将数组从中间分成前后两部分,然后对前后两部分进行分别排序,再将排序好的两部分合并在一起。
def merge_sort(alist):n = len(alist)# 递归终止条件if n <= 1:return alistmid = n // 2left_li = merge_sort(alist[:mid])right_li = merge_sort(alist[mid:])result = []left_pointer, right_pointer = 0, 0while left_pointer < len(left_li) and right_pointer < len(right_li):if left_li[left_pointer] < right_li[right_pointer]:result.append(left_li[left_pointer])left_pointer += 1else:result.append(right_li[right_pointer])right_pointer += 1result += left_li[left_pointer:]result += right_li[right_pointer:]return result
原地排序算法:空间复杂度为O(n)
- 稳定排序算法:值相等的元素,不交换位置
时间复杂度:最好O(nlogn)、最坏O(nlogn)、平均O(nlogn)
5、快速排序 Quick Sort
如果要排序数组中下标从 p 到 r 之间的一组数据,选择 p 到 r 之间的任一个数据作为pivot(分区点)。遍历 p 到 r 之间的数据,将小于 pivot 的放到左边,将大于 pivot 的放到右边,将 pivot 放在中间。
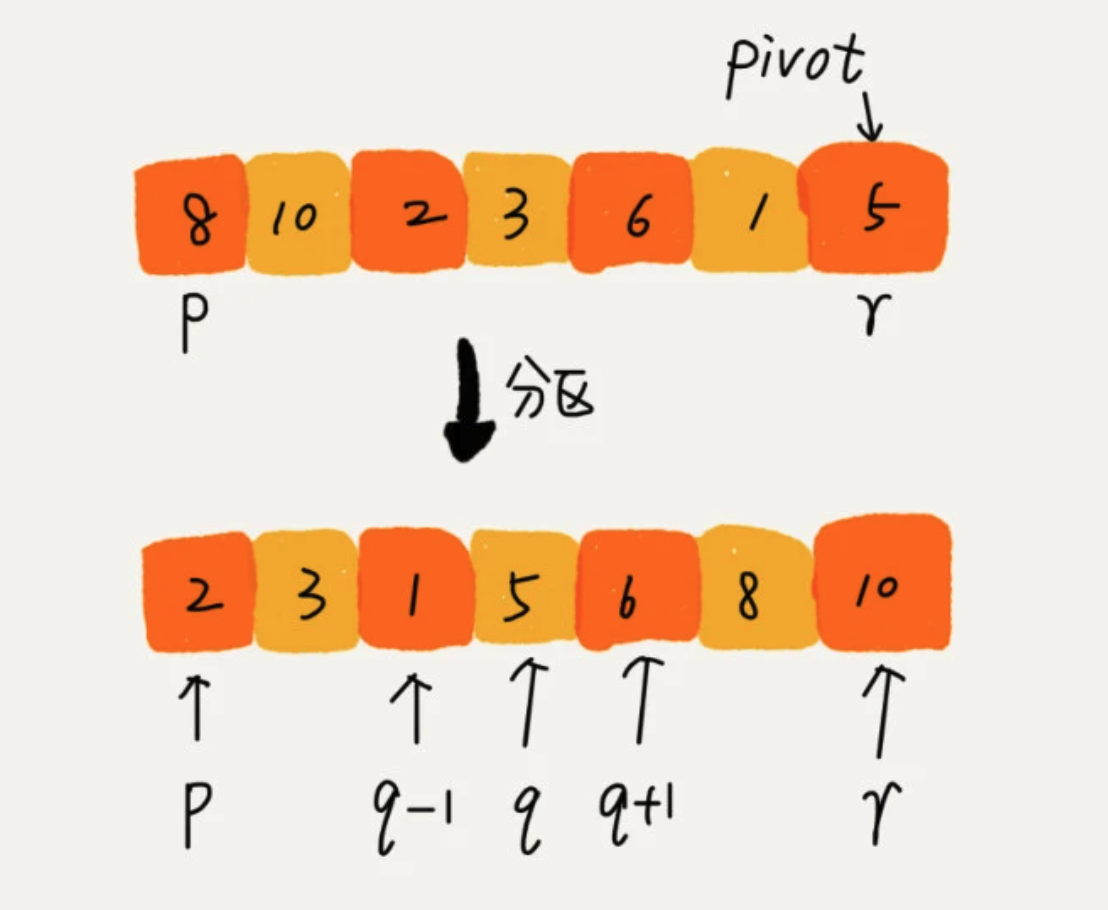
然后根据分治、递归的思想,分别处理两边的数据。def quick_sort(alist, start, end):if start > end:returnpivot = alist[end]low = starthigh = end# 小于pivot 放在左边,大于pivot放在右边while low < high:while low < high and alist[low] <= pivot:low += 1alist[high] = alist[low]while low < high and alist[high] > pivot:high -= 1alist[low] = alist[high]alist[low] = pivotquick_sort(alist, low+1, end)quick_sort(alist, start, high-1)
原地排序算法:空间复杂度为O(1)
- 不稳定排序算法
- 时间复杂度:最好O(nlogn)、最坏O(n2)、平均O(nlogn)
6、桶排序 Bucket Sort
将要排序的数据分到几个有序的桶里,每个桶里的数据再单独进行排序。桶内排完序之后,再把每个桶里的数据按照顺序依次取出,组成的序列就是有序的了。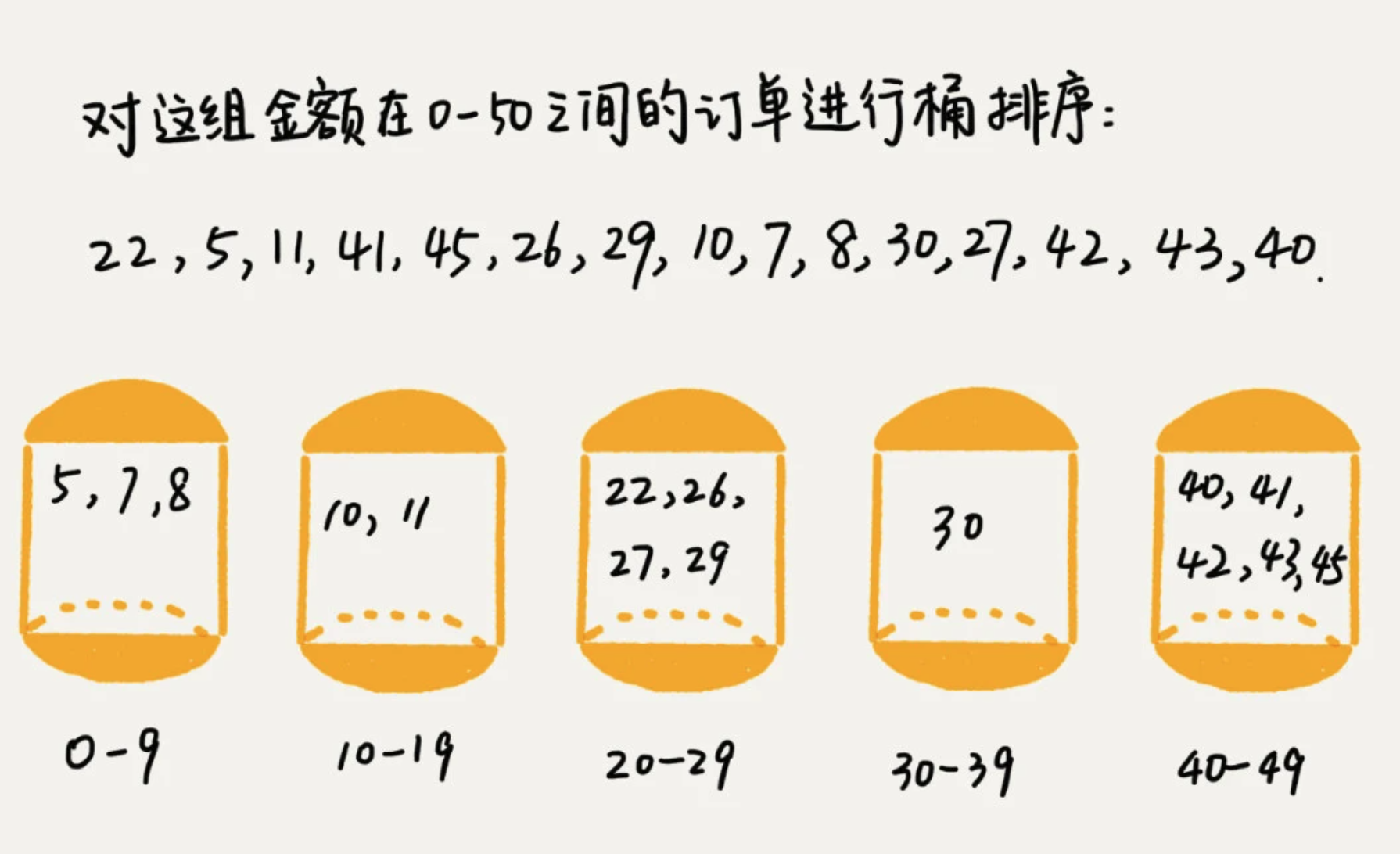
理想情况下,时间复杂度:O(n)7、计数排序 Counting Sort
其属于桶排序的一种特殊情况。当要排序的n个数据,所处的范围并不大的时候,比如最大值是k,我们可以把数据分为k个桶,每个桶内的数据值都是相同的,省掉了桶内排序的时间。
从计数的来看,举一个例子
假设只有 8 个考生,分数在 0 到 5 分之间。这 8 个考生的成绩我们放在一个数组 A[8]中,它们分别是:2,5,3,0,2,3,0,3。考生的成绩从 0 到 5 分,我们使用大小为 6 的数组 C[6]表示桶,其中下标对应分数。不过,C[6]内存储的并不是考生,而是对应的考生个数。
代码实现: ```python import itertools
def counting_sort(alist): if len(alist) <= 1: return
# a中有counts[i]个数不大于icounts = [0] * (max*(alist) + 1)for num in alist:counts[num] += 1counts = list(intertools.accumulate(counts))# 临时数组,存储排序之后的结果a_sorted = [0] * len(alist)for num in reversed(alist):index = counts[num] - 1a_sorted[index] = numcounts[num] -= 1alist[:] = a_sorted
<a name="qrjgt"></a>### 8、基数排序 Radix Sort从末尾依次按照单个元素排序,直到头部元素,即可排序完成。需要每一个元素的排序算法是稳定的,如果位数不够,可以补"0"<br /><a name="inPTL"></a>### 9、堆排序 Heap Sort时间复杂度稳定的 O(nlogn)<br />堆排序过程大致分为两个步骤:建堆和排序<a name="puid0"></a>#### 1、建堆**建堆的是时间复杂度是 O(n)**<br />有两种思路<br />第一种,在堆中插入元素。尽管数组中包含n个数据,但可以假设,起初堆中只包含一个数据,就是下标为 1 的数据。然后,调用插入操作,将下标从 2 到 n 的数据依次插入到堆中,这样就将包含n个数据的数组,组成了堆。也就是从前往后处理数据,每个数据插入的收,从下往上堆化。<br />第二种,将已经存在n个数据的数组,从后往前处理数组,每个数据从上往下堆化。<a name="aU2Xi"></a>#### 2、排序建堆完成后,得到一个大顶堆。数组的第一个元素就是堆顶,也就是最大的元素。将它跟最后一个元素交换,那最大元素就放到了下标为 n 的位置。以此类推,直到堆中剩下下标为 1的元素,排序完成。<br /><br />排序的时间复杂度是 O(logn)<br />所以,**堆排序的总时间复杂度为 O(nlogn)**。<a name="qvCy6"></a>#### 4、应用<a name="LSAhj"></a>##### 1、优先队列从优先级队列取出优先级最高的元素,就相当于取出 堆顶元素。其实际应用如:<a name="CqHd5"></a>###### 1、合并有序小文件假设有100个小文件,每个文件的大小是100MB,每个文件中存储的都是有序的字符串。希望将这些100个小文件合并成一个有序的大文件。<br />**解决:**<br />从小文件中取出的字符串放入到小顶堆中,也堆顶元素,也就是优先级队列队首的位置,就是最小的字符串。然后将这个字符串放入到大文件中,并将其从堆顶删除。然后从小文件中取出下一个字符串,循环这个过程。<a name="whv2j"></a>###### 2、定时器假设定时器维护了多个定时任务,每个任务出发都有一个时间点。定时器每过一个很小的时间,就扫描一边任务,看是否有任务到达设定的执行之间,如果有,就拿出来执行。<br /><br />**解决:**<br />按照任务的设定执行时间,将这些任务存储在优先队列中,队列首部(也就是小顶堆的堆顶)存储的是最先执行的任务。<br />这样每过那个很小的定时时间后,就不用扫描整个任务了,直接取出堆顶的任务,执行即可。堆内再进行堆化。<a name="lwxbQ"></a>##### 2、利用堆求 Top K1. 针对静态数据,数据集合已经固定维护一个大小为 K 的小顶堆,顺序遍历数组,从数组中取出数据与堆顶元素比较。如果比堆顶元素大,就把堆顶元素删除,将这个元素插入到堆中;如果比堆顶元素小,则不处理,直到遍历完数组。堆中就是前 K 大数据。<br />遍历数组需要 O(n),堆化需要 O(log K),所以时间复杂度为 O(nlog k)2. 针对动态数据维护一个 K 大小的小顶堆,当有数据被添加到集合中时,跟堆顶元素对比,如果比堆顶元素大,就把堆顶元素删除,将这个元素插入到堆中;如果比堆顶元素小,则不处理。这样,始终保持 有一个 大小为 K 的小顶堆,可以查询前 K 大数据。<a name="CmOud"></a>##### 3、求中位数维护两个堆,一个大顶堆,一个小顶堆。大顶堆中存储牵绊部分数据,小顶堆存储后半部分数据,且小顶堆中的数据都大于大顶堆中的数据。<br /><br />当数据插入导致,出现 大顶堆的元素 多余 小顶堆的时候,就将大顶堆的堆顶,不停的移动到小顶堆中。<br />插入数据,导致需要堆化,所以时间复杂度为 O(logn),中位数,就是大顶堆的堆顶元素。O(1)<a name="TtziE"></a>## 2、二分查找 Bsearch针对一个有序的数据集合,查找思想类似分治思想。每次都通过跟区间的中间元素对比,将待查找的区间缩小为之前的一半,直到找到要查找的元素,或者区间被缩小为0。<br />优势:时间复杂度 (logn)<br />劣势:局限性(依赖顺序表结构、有序数据、针对较大数据量)<a name="NAXw6"></a>### 1、简单实现```pythondef bsearch(alist, target):low, high = 0, len(alist) - 1while low <= high:# 防止值溢出mid = low + (high - low) // 2if alist[mid] == target:return midelif alist[mid] < target:low = mid + 1else:high = mid - 1return -1
2、递归实现
def bsearch_internally(alist, low, high, target):if low > high:return -1# 将整除2,转换为 位运算mid = low + int((high-low) >> 1)if alist[mid] = traget:return midelif alist[mid] < target:return bsearch_internally(alist, mid+1, high, target)else:return bsearch_internally(alist, mid-1, high, target)bsearch_internally(alist, 0, len(alist)-1, target)
3、有序集合中存在重复数据,查找第一个值等于给定值
def bsearch(alist, target):low, high = 0, len(alist) - 1while low <= high:mid = low + int((high - low) >> 1)if alist[mid] < target:low = mid + 1else:high = mid - 1# 当游标 小于 数组长度 并且 ,最小的游标等于 目标值if low < len(alist) and alist[low] == target:return lowelse:return -1
4、有序集合中存在重复数据,查找最后一个值等于给定值
def bsearch(alist, target):low, high = 0, len(alist) - 1while low <= high:mid = low + int((high - low) >> 1)if alist[mid] < target:low = mid + 1else:high = mid - 1# 当游标 大于0 并且 ,最大的游标等于 目标值if high > 0 and alist[high] = target:return highelse:return -1
3、哈希算法 Hash
将任意长度的二进制值串映射为固定长度的二进制值串,这个映射的规则就是哈希算法,通过原始数据映射之后得到的二进制值串就是哈希值。
其在实际中有常见的易用场景:
1、安全加密
最常用于加密的哈希算法是 MD5(MD5 Message-Digest Algorithm,MD5消息摘要算法)和SHA(Secure Hash Algorithm,安全散列算法)。
以及 DES(Data Encryption Standard,数据加密标准)、AES(Advanced Encryption Standard,高级加密标准)。
- 散列冲突的概率要很小
鸽巢原理:如果有 10 个鸽巢,有 11 只鸽子,那肯定有 1 个鸽巢中的鸽子数量多于 1 个,换句话说就是,肯定有 2 只鸽子在 1 个鸽巢内。
因此用MD5的例子,哈希值是固定的128位二进制串,最多能表示2^128个数据,就必然会存在哈希值相同的情况。
2、唯一标识
针对图片来讲,可以从图片的二进制码串开头取100字节,从中间取100个字节,从最后再取100字节,将这300字节放到一块,通过哈希算法(如MD5),得到一个哈希字符串,用它作为图片的唯一标识。以此来更高效地判断图片是否在图库中。
进一步提高效率,可以将每一张图片的唯一标识,和相应的图片文件的路径信息,都存储在散列表中。当要查看某个图片是否在图库中时,先通过哈希算法对图片取唯一标识,然后在散列表中查找是否存在这个唯一标识。
如果不存在,则说明图片不再图库中;如果存在,通过散列表获取到文件路径,获取已经存在的图片,进行全量比对,看是否完全一样。
3、数据校验
BT 下载的原理是基于 P2P 协议的。我们从多个机器上并行下载一个 2GB 的电影,这个电影文件可能会被分割成很多文件块(比如可以分成 100 块,每块大约 20MB)。等所有的文件块都下载完成之后,再组装成一个完整的电影文件就行了。
通过哈希算法,对 100 个文件块分别取哈希值,并且保存在种子文件中。哈希算法有一个特点,对数据很敏感。只要文件块的内容有一丁点儿的改变,最后计算出的哈希值就会完全不同。所以,当文件块下载完成之后,我们可以通过相同的哈希算法,对下载好的文件块逐一求哈希值,然后跟种子文件中保存的哈希值比对。如果不同,说明这个文件块不完整或者被篡改了,需要再重新从其他宿主机器上下载这个文件块。
4、散列函数
5、负载均衡
实现一个会话粘滞(session sticky)的负载均衡算法:
通过哈希算法,对客户端IP地址或会话ID计算哈希值,将取得的哈希值与服务器列表的大小进行取模运算,最终得到的值就是应该被路由到的服务器编号。
6、数据分片
针对较大数据,在哈希计算中,整体会比较耗时,这个时候可以将数据进行分片,在不同的机器分别进行哈希计算哈希值,最终再构建整体的散列表。
7、分布式存储
如分布式缓存,针对海量数据,西安通过哈希算法对数据取哈希值,然后对机器个数取模,这个最终值就是应该存储的缓存机器编号。
当需要扩容的时候,所有数据需要重新计算哈希值,原有的哈希值失效,可能会导致雪崩效应。
解耦,增加一个中间层,使得哈希函数以来一个稳定的区间数(2^32),当服务器数量变化时,若增加,则搬移部分数据,若减少,同样重新分配缓存数据 这样只会有部分缓存被影响。
4、优先搜索 First Search
1、广度优先搜索 BFS Breadth-First-Search
一种“地毯式”层层推进的搜索策略,即先查找离起始顶点最近的,然后是次近的,依次往外搜搜。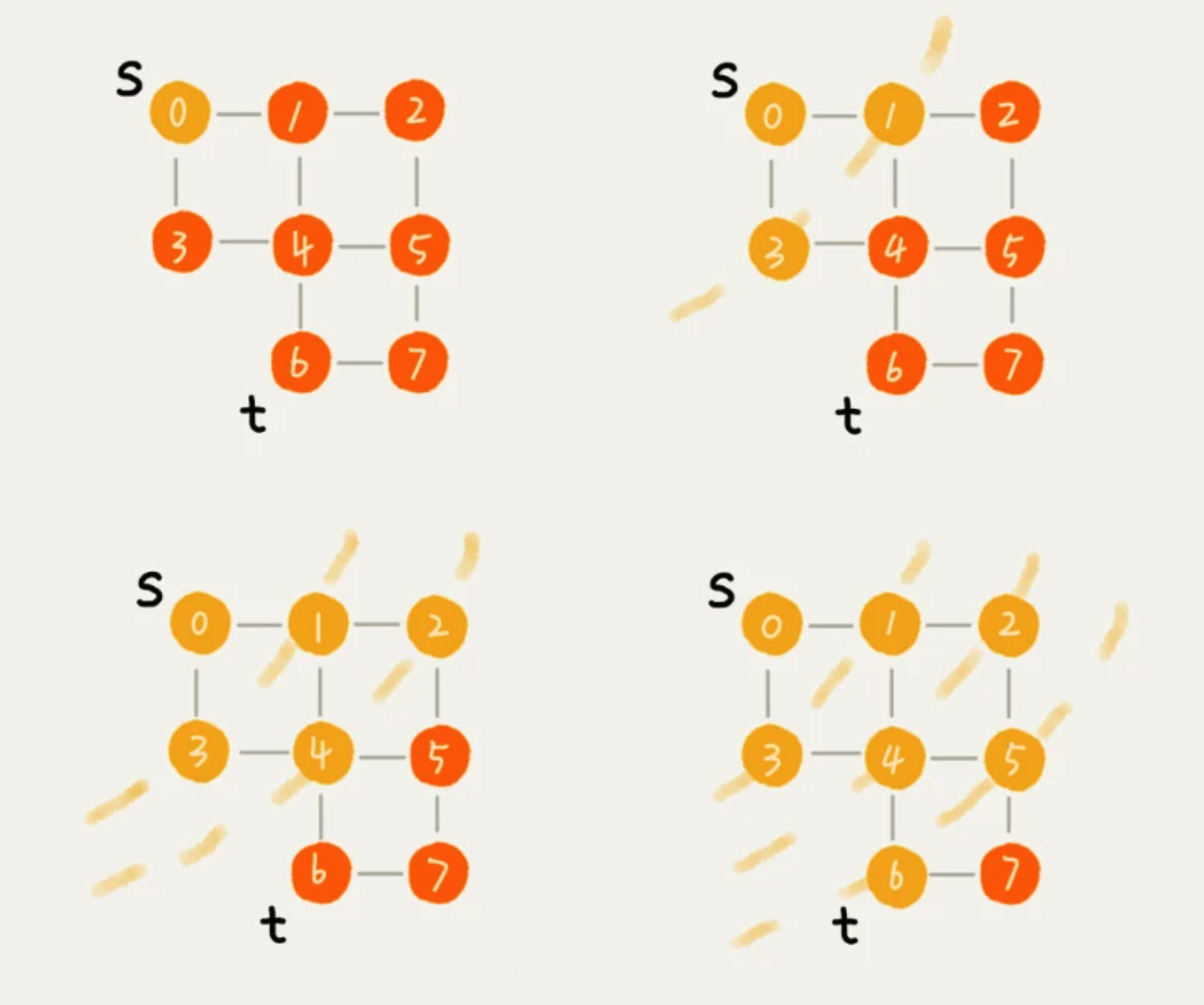
2、深度优先搜索 DFS Depth-First-Search
采用了 回溯思想,从一条路径一直走到头,然后返回到上一个分叉路口,再进入另一条路径,直到没有顶点。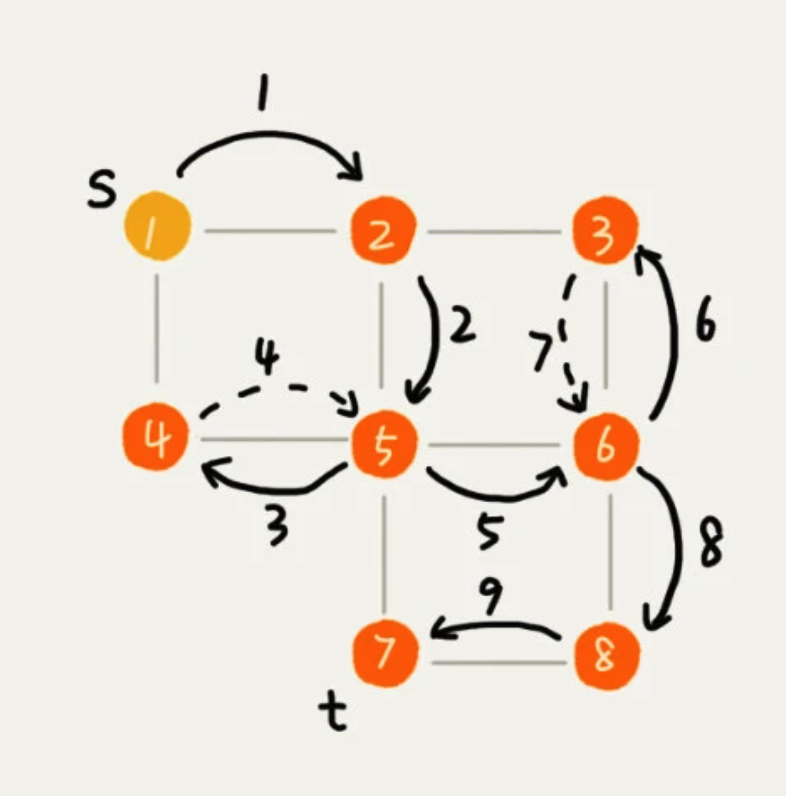
from collections import dequeclass Graph():# s是开始顶点,t是要搜索到的目标顶点def __init__(self, num_vertices)# 图的度的数量self._num_vertices = num_vertices# 用二维数组来保存图self._adjacency = [[] for _ in range(num_vertices)]# 添加度def add_edge(self, s, t):self._adjacency[s].append(t)self._adjacency[t].append(s)def _generate_path(self, s, t, prev):# prev来记录搜索路径if prev[t] or s != t:yield from self._generate_path(s, prev[t], prev)yield str(t)def bfs(s, t):if s == t: return# 用来记录已经访问的节点visited = [False] * self._num_verticesvisited[s] = True# 双端队列,存储已经被访问、但相连的顶点还没有被访问的顶点q = deque()q.append(s)prev = [None] * self._num_verticeswhile q:# 左侧弹出一个元素(List),即第一层v = q.popleft()# 遍历这个元素内部for neighbour in self._adjacency[v]:# 如果没有访问过的if not visited[neighbour]:# 将这个 list元素,赋值给 prev记录prev[neighbour] = v# 如果内部元素 是目标元素,直接打印if neighbour == t:print('-->'.join(self._generate_path(s, t, prev)))return# 检查完了之后,记录该顶点已经访问visited[neighbour] = True# 添加到队列中q.append(neighbour)def dfs(self, s, t):# 用来标识,找到顶点t之后,不再递归found = Falsevisited = [False] * self._num_verticesprev = [None] * self._num_verticesdef _dfs(from_vertex):nonlocal foundif found: returnvisited[from_vertex] = Trueif from_vertex == t:found = Truereturnfor neighbour in self._adjacency[from_vertex]:if not visited[neighbour]:prev[neighbour] = from_vertex_dfs(neighbour)_dfs(s)print("->".join(self._generate_path(s, t, prev)))if __name__ == "__main__":graph = Graph(8)graph.add_edge(0, 1)graph.add_edge(0, 3)graph.add_edge(1, 2)graph.add_edge(1, 4)graph.add_edge(2, 5)graph.add_edge(3, 4)graph.add_edge(4, 5)graph.add_edge(4, 6)graph.add_edge(5, 7)graph.add_edge(6, 7)graph.bfs(0, 7)graph.dfs(0, 7)
5、字符串匹配算法
1、BF算法 Brute Force
即暴力匹配算法,也叫朴素匹配算法。
在字符串A中查找字符串B,那么字符串A就是主串,字符串B就是模式串。
该算法思想就是:在珠串中,检查起始位置分别是:0、1、2……n-m 且长度为 m 的 n-m+1 个子串。因此时间复杂度为 O(n*m)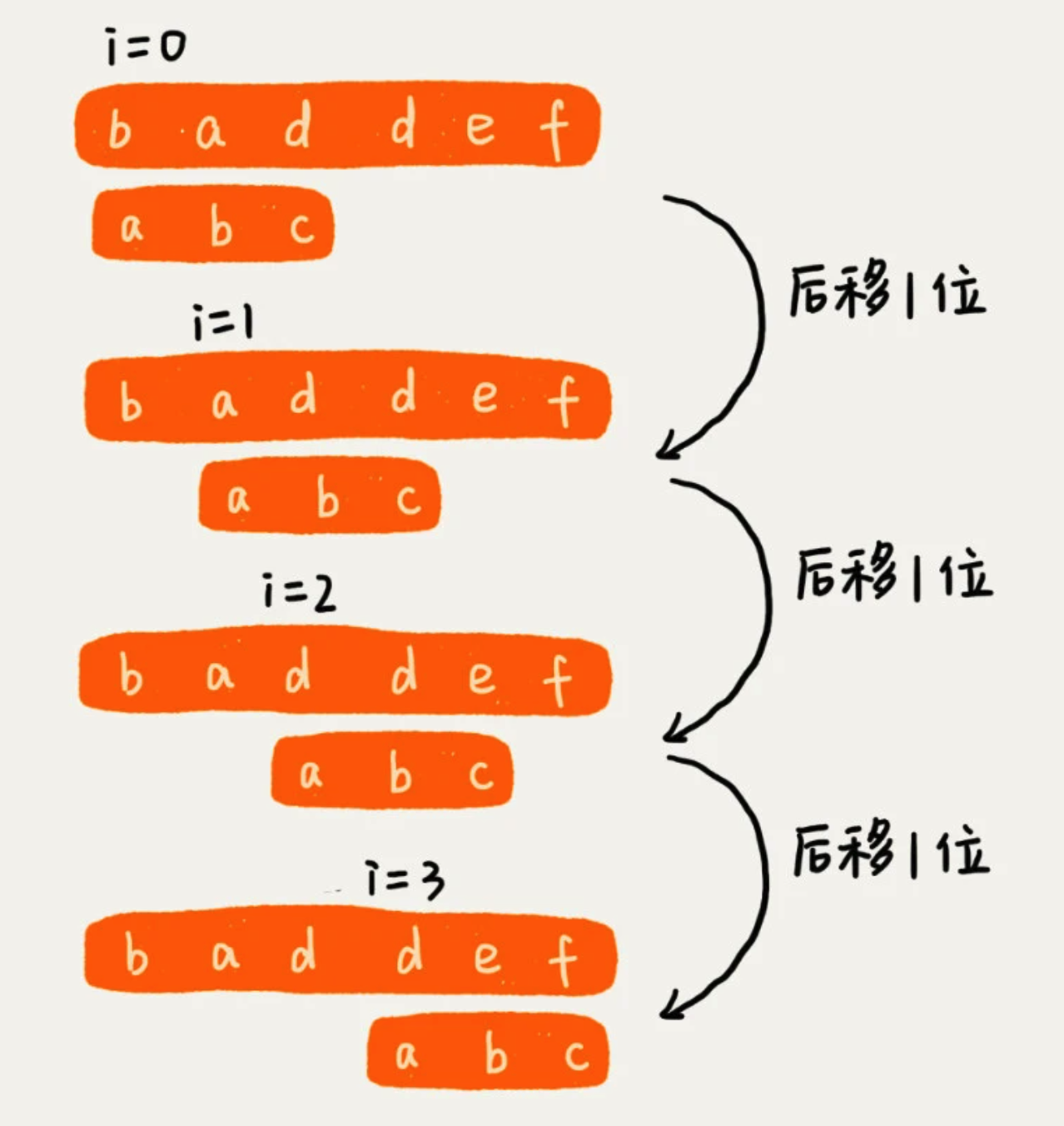
优点:
- 实际开发中,模式串和主串不会太长,且匹配到的时候,就会直接停止,效率会相对较高。
-
2、RK算法 Rabin-Karp
其思想是:通过哈希算法对主串中 n-m+1 个子串分别求哈希值,然后逐个与模式串的哈希值比较。这里重点在于哈希算法的实现,不然会很容易造成哈希冲突。
假设要匹配的字符串集中只包含K个字符串,可以用一个K进制数来表示一个子串,这个 K 进制转化为十进制数,作为子串的哈希值。
哈希算法
比如要处理的字符串中只包含 a~z 这26个小写字母,就用二十六进制来表示一个字符串。将这26个字符映射到 0~25 这 26 个数字,a就是0,b就是1,以此类推。
在十进制的表示法中,一个数字的值是通过下面方式算出来的。对应到二十六进制,一个把包含 a到z这26个字符的字符串,计算哈希的时候,只需要把进位 10 改为 26.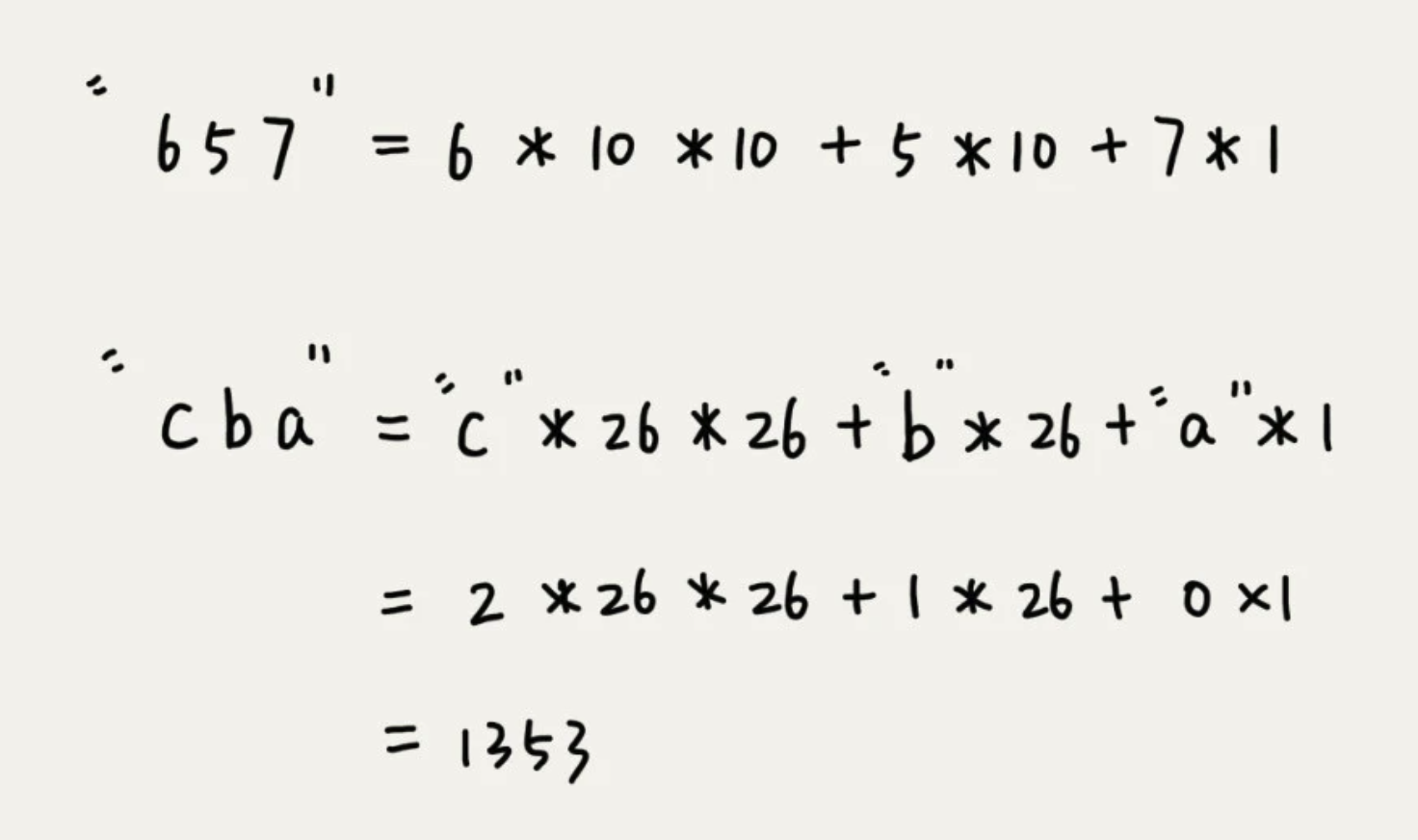
这种哈希算法有一个特点,在主串中,相邻两个子串的哈希值的计算公式有一定关系。也就是,后一个是前一个 * 26的值。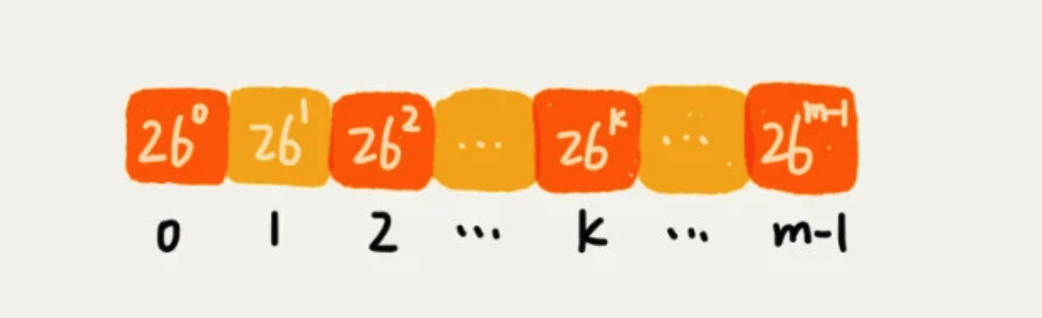
计算每个子串的哈希值,需要扫描一遍主串,这部分时间复杂度是 O(n),
模式串的哈希值与每个子串的哈希值进行比较的时间复杂度是O(1),总共比较 n-m+1 个子串,这部分是时间复杂度是 O(n)。
所以整体时间复杂度是 O(n)3、BM算法 Boyer-Moore
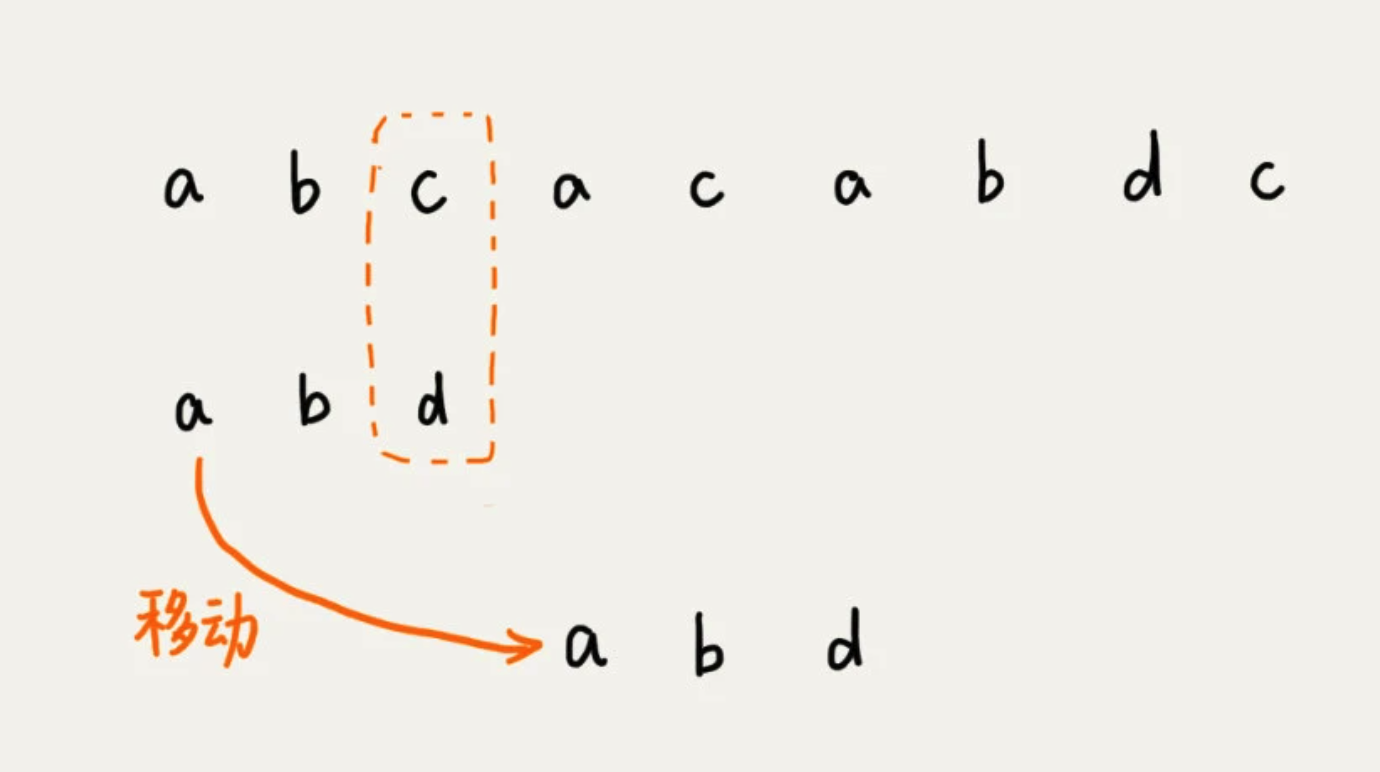
当模式串和主串某个字符不匹配的时候,能够跳过一些肯定不会匹配的情况,将模式串往后多滑动几位。
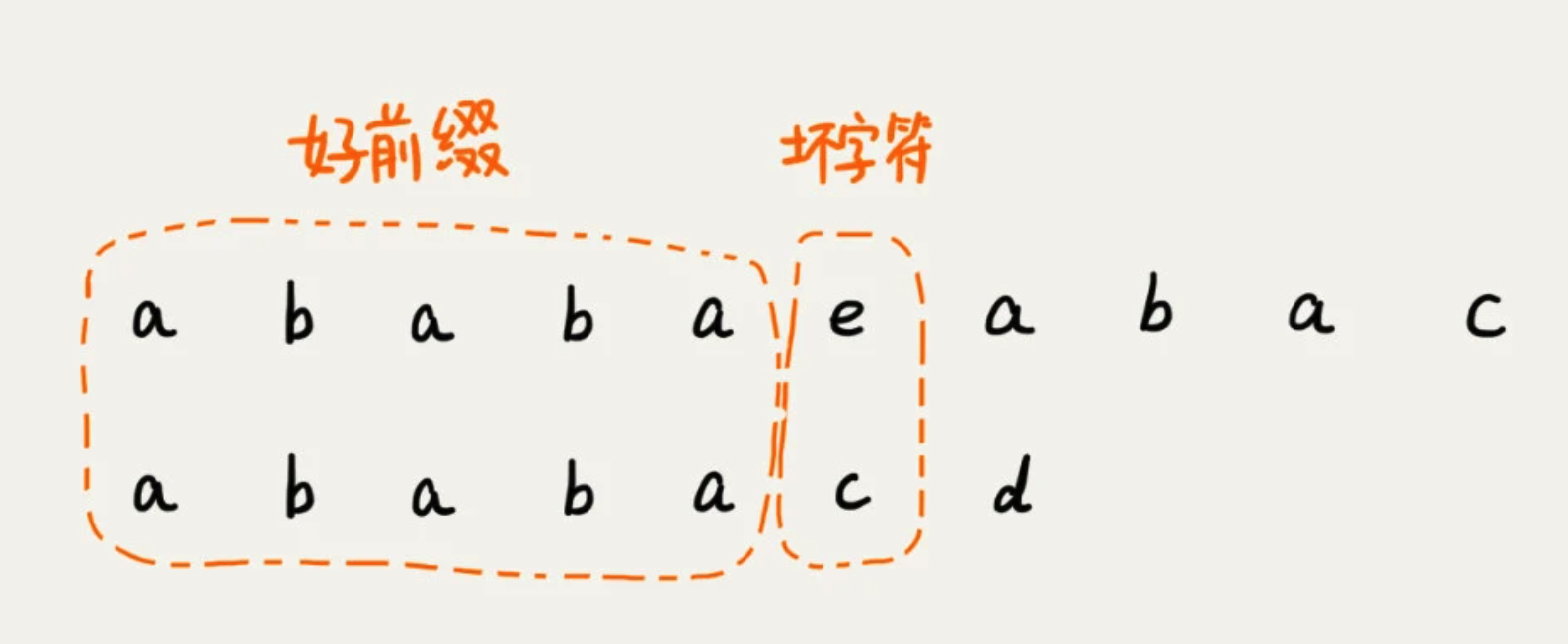
1、坏字符规则
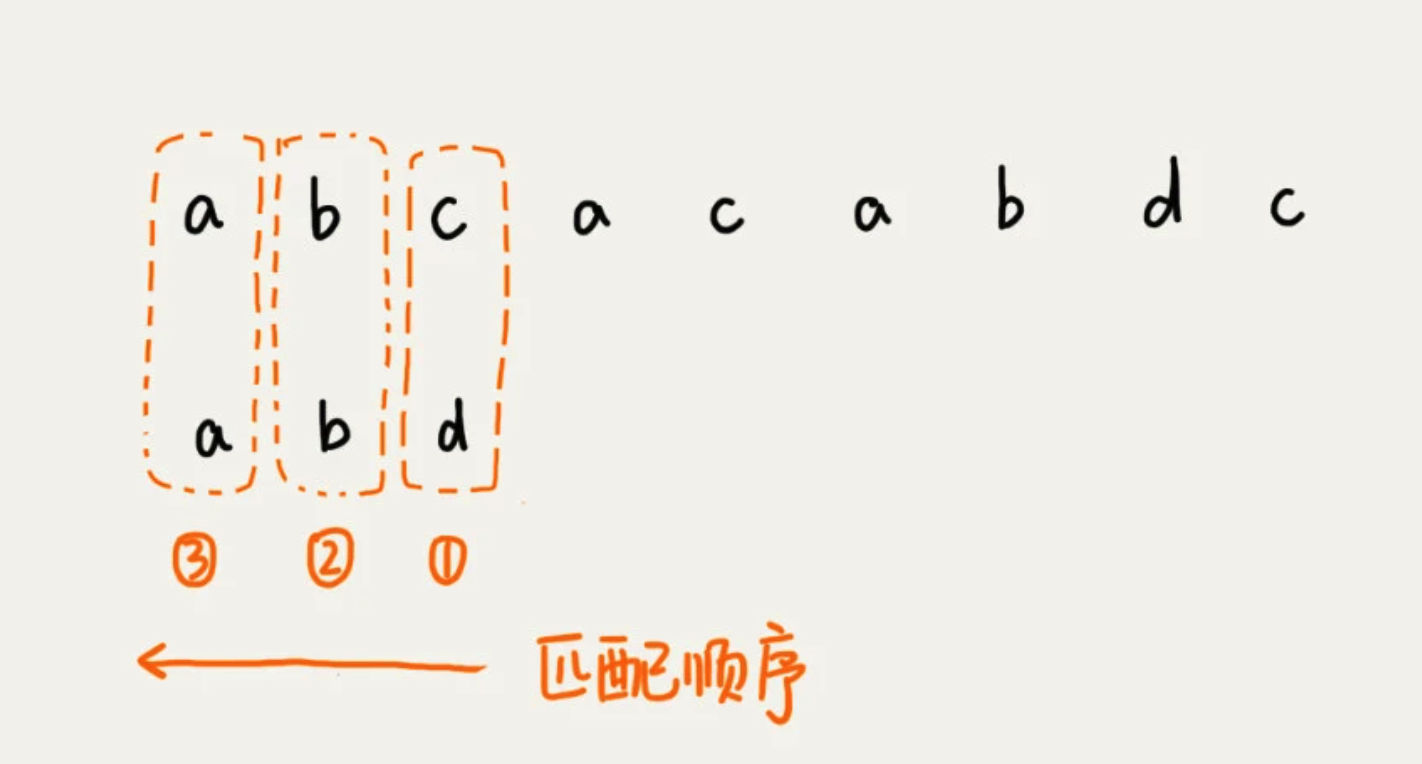
从模式串的末尾往前倒着匹配,当发现某个字符没法匹配的时候,把这个没有匹配的字符叫做坏字符(主串中的字符)。
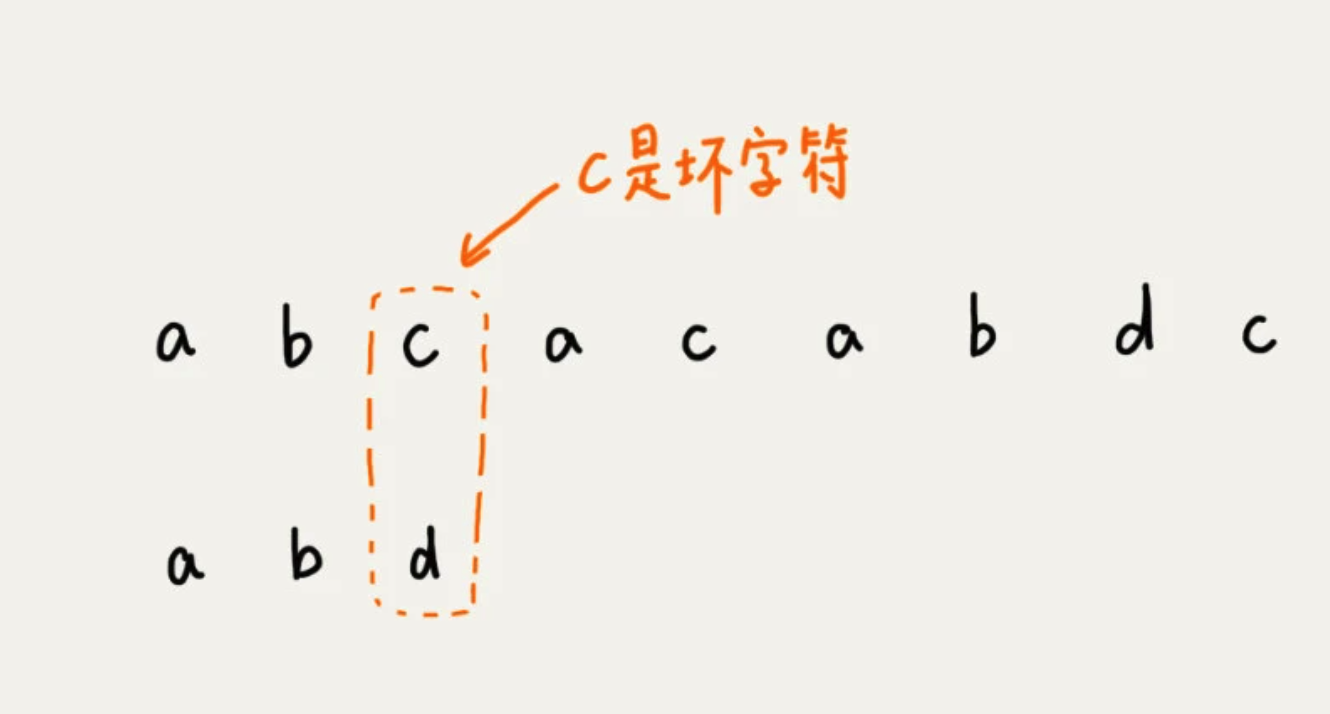
拿着字符 c 在模式串中查找,发现模式串中不存在这个字符。这时,直接将模式串往后滑动三位,再开始比较。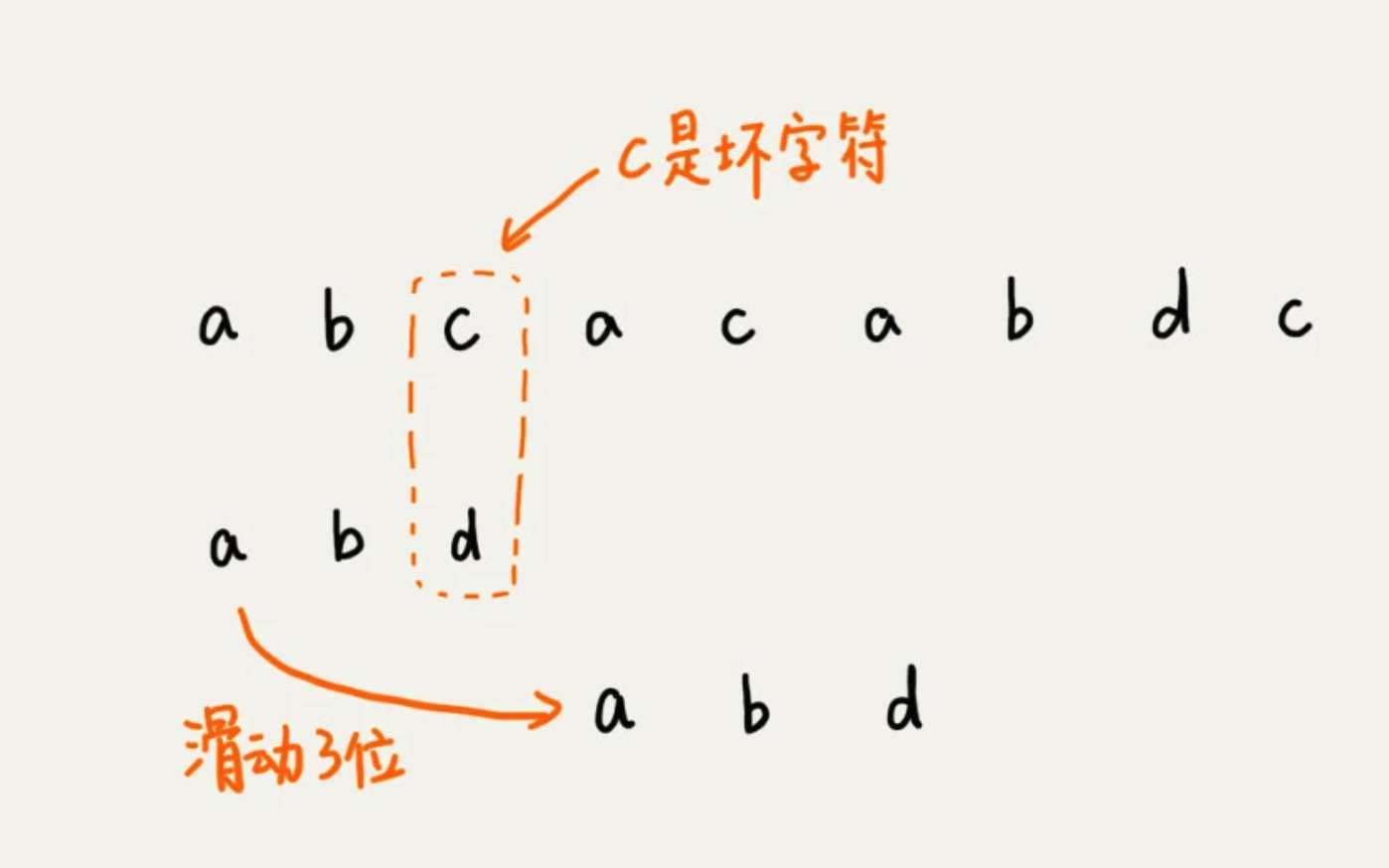
这时,发现模式串中最后一个字符 d ,还是无法跟,主串中的 a 匹配。这时,注意字符 a 在模式串中是存在的,就需要将模式串往后滑动两位,让两个 a 上下对齐。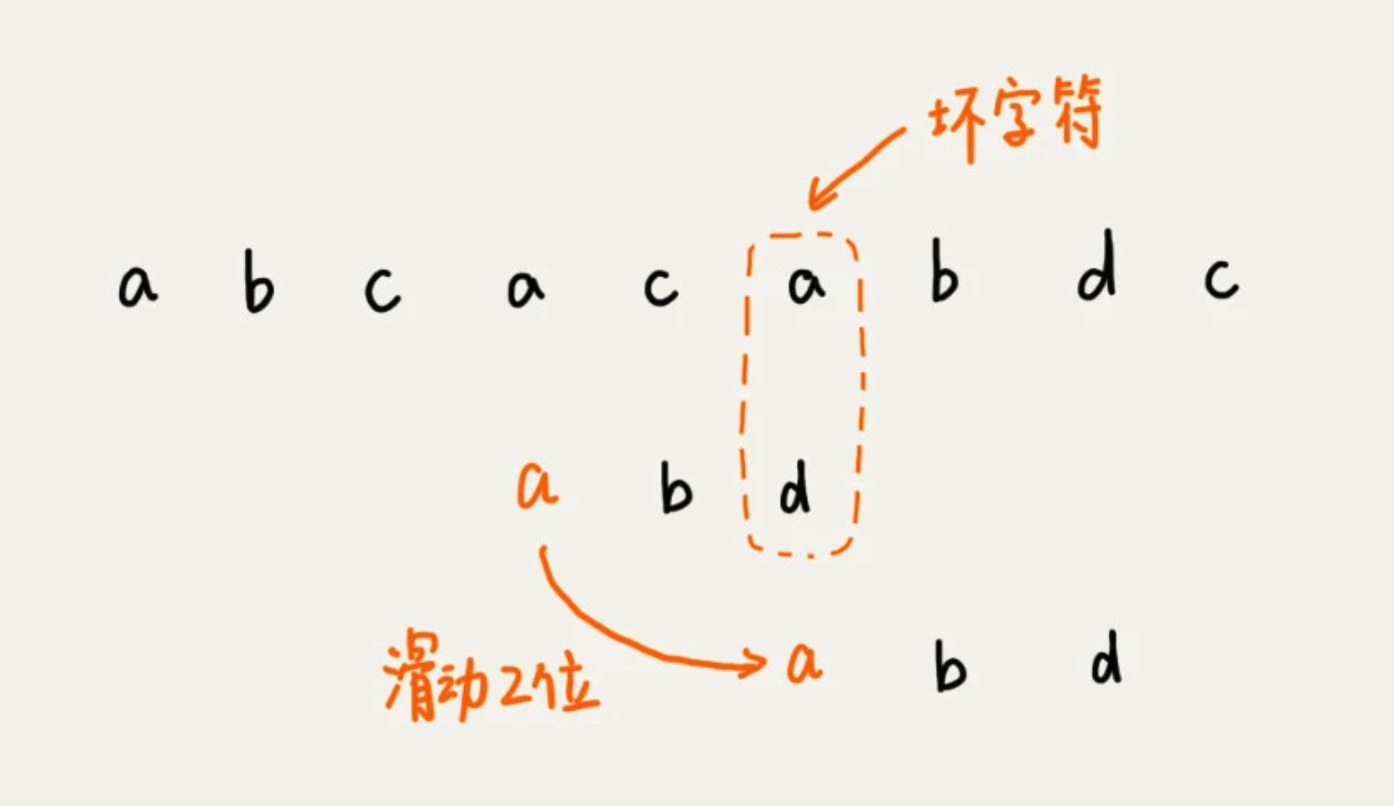
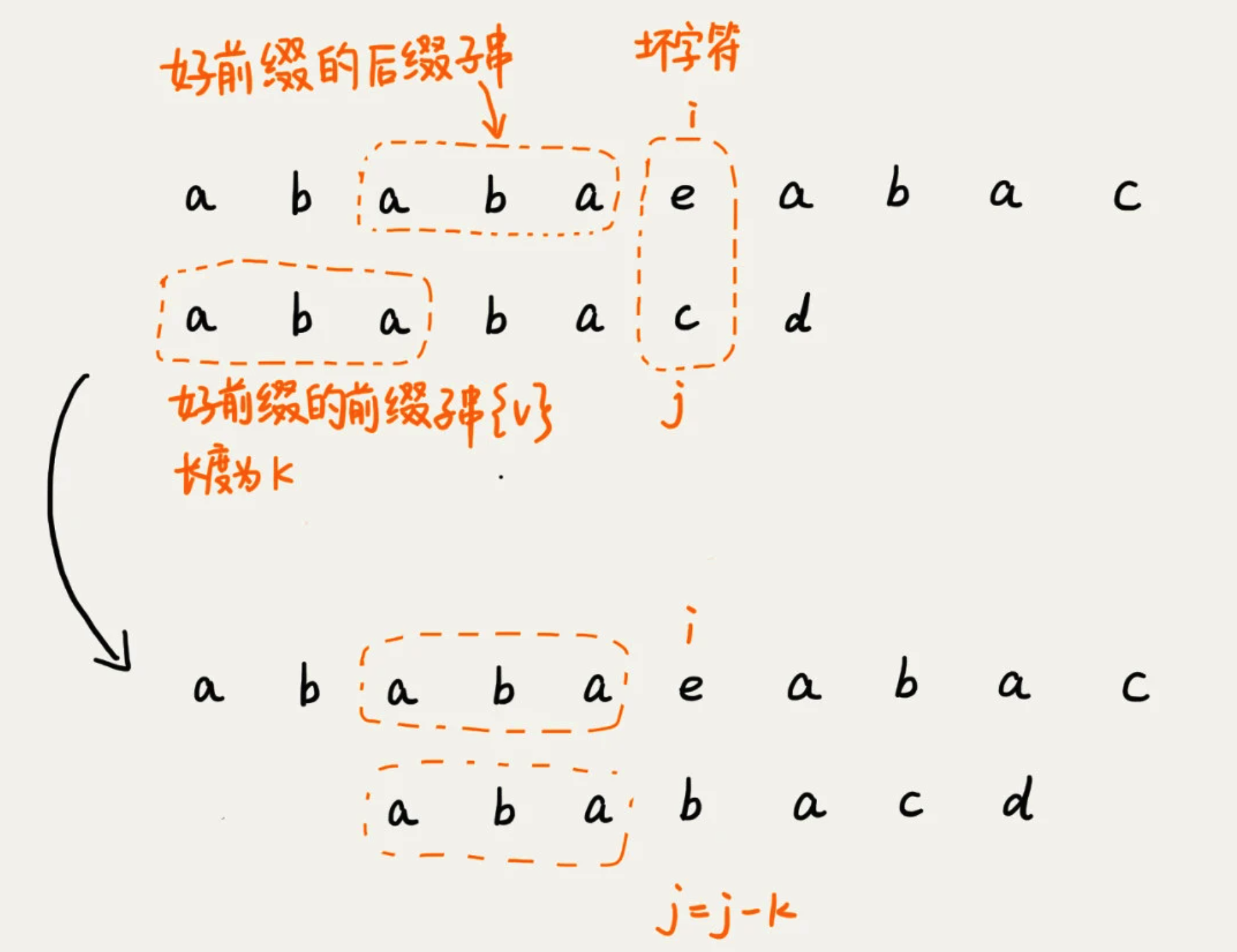
当发生不匹配的时候,将坏字符对应的模式串中的字符下标记为 si。如果坏字符在模式串中存在,就将坏字符在模式串中的下标记为 xi。如果不存在,把 xi 记作 -1.那模式串往后移动的位数就等于 si - xi。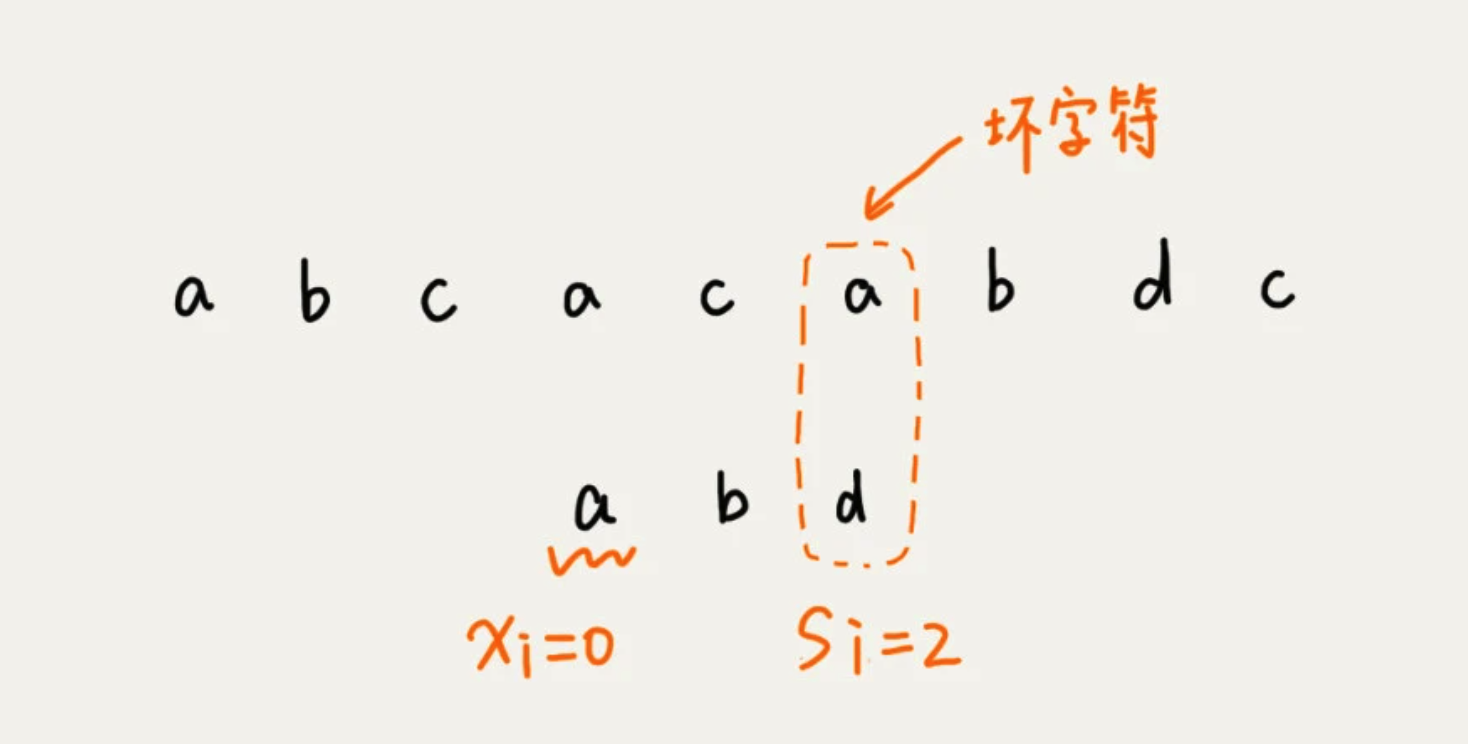
如果,坏字符串在模式串中多处出现,为了滑动过多,选择最靠后的那个。
然而,因为不存在时记作 -1,如主串是 aaaaaaaaaaaaaaaa,模式串是 baaa,那么就会导致相减之后,出现负数的情况。因此,还需要好后缀规则。2、好后缀规则
将已经匹配的 bc 叫做 好后缀,记作 {u}。拿它在模式串中查找,如果找到了另一个跟 {u} 想匹配的子串 {u},那么就将模式串滑动到子串{u}与主串中{u}对齐的位置。
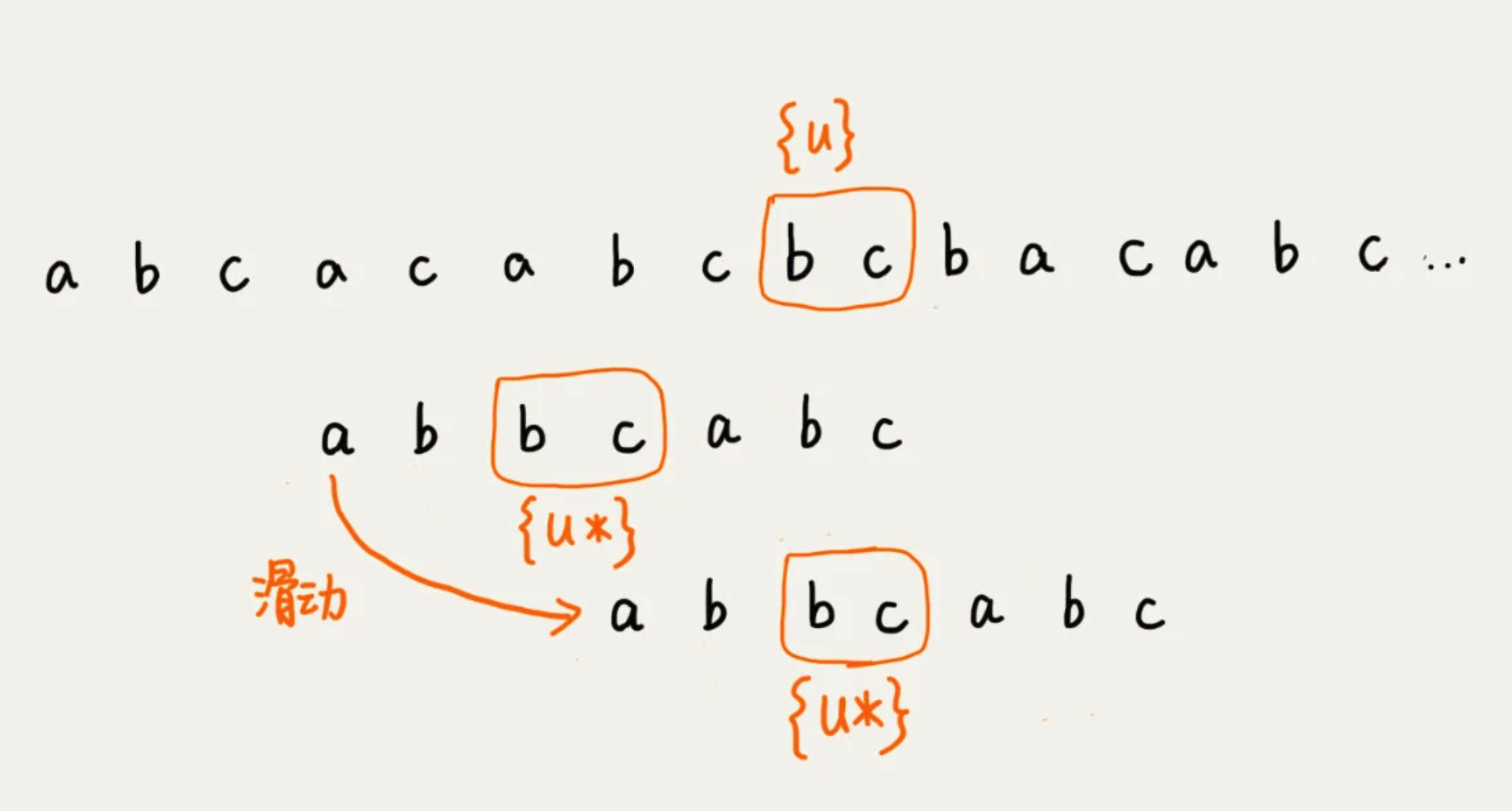
如果找不到的话,就直接划到主串{u}的后面,会导致过度滑动。正确应该是,滑动到主串{u}的最后一个字符下面。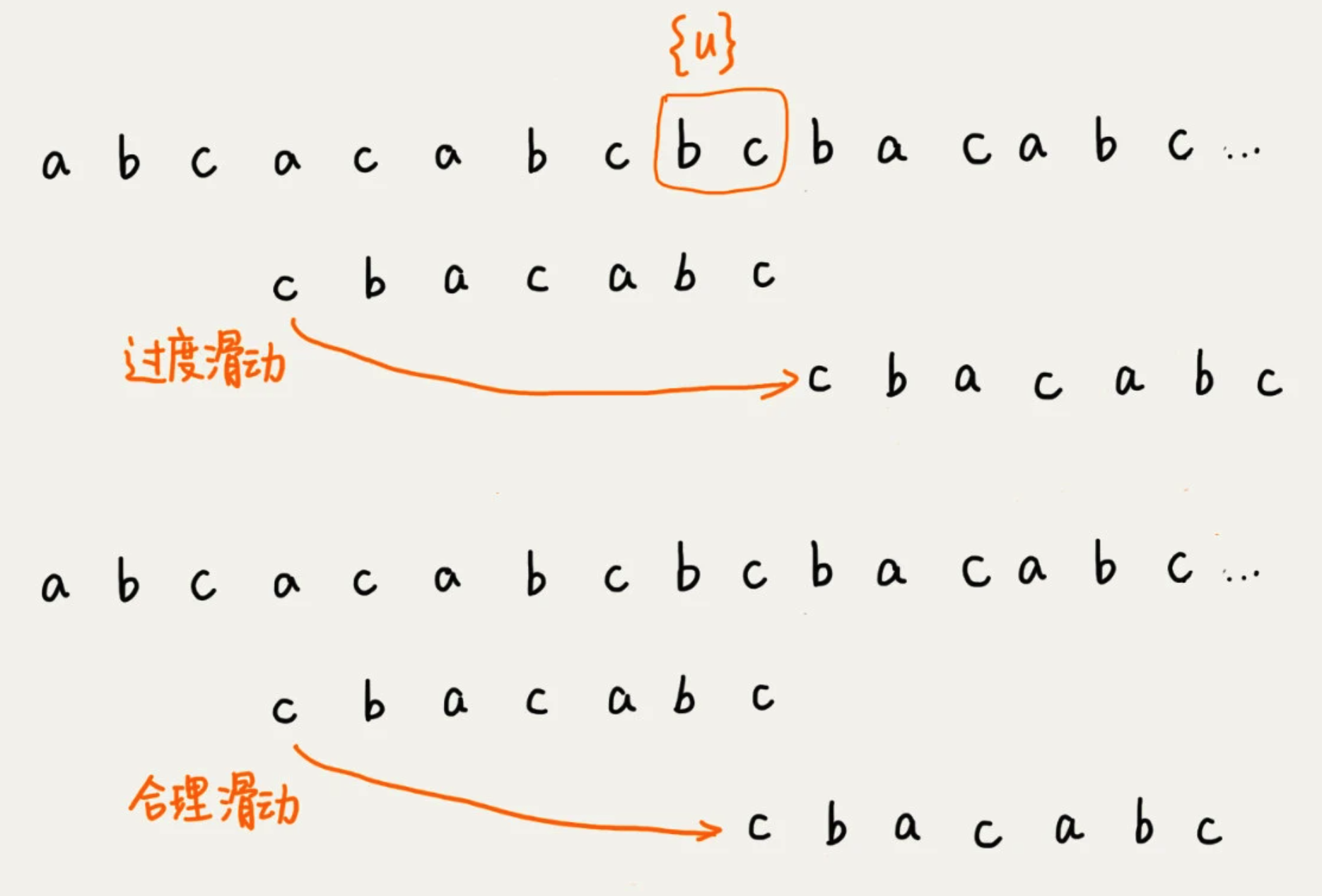
在滑动过程中,会导致以下两个情况。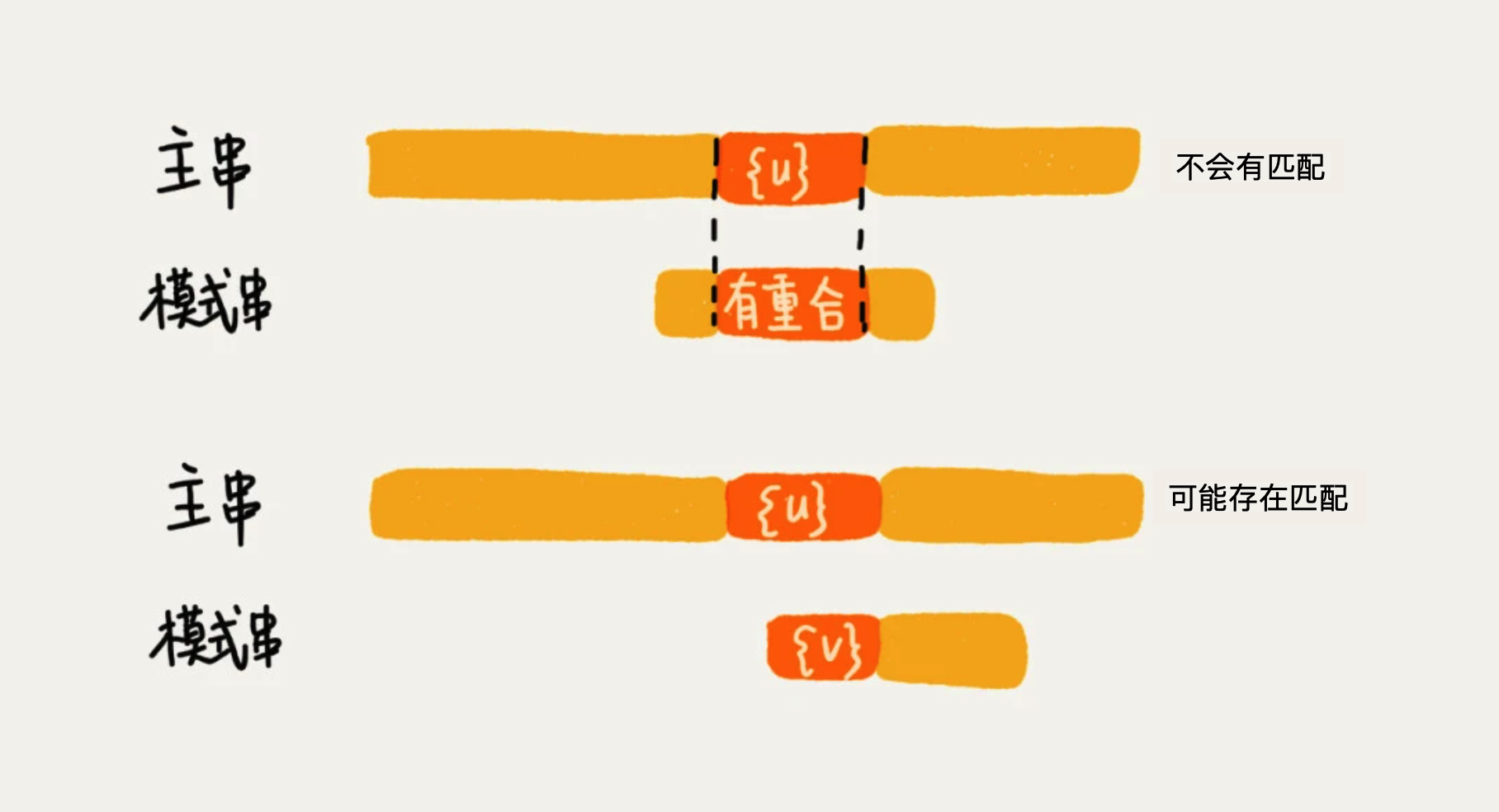
规则选择:
分别计算好后缀和坏字符往后滑动的位数,然后取两个数中最大的,作为模式串往后滑动的位数,可以避免坏字符串规则的,滑动位数为负的情况。3、实现
```python SIZE = 256 def bm(main, pattern): assert type(main) is str and type(pattern) is str n, m = len(main), len(pattern) if n <= m:
return 0 if main == pattern else -1
bc
bc = [-1] * SIZE generate_bc(pattern, m, bc)
gs
suffix = [-1] m prefix = [False] m generate_gs(pattern, m, suffix, prefix)
i = 0
只要小于主字符串长度
while i < n-m+1:
j = m - 1while j >-= 0:if main[i+j] != pattern[j]:breakelse:j -= 1# pattern整个已匹配,返回if j == -1:return i# 1、bc规则计算后移位数x = j - bc[ord(main[i+j])]# 2、gs规则计算后移位数y = 0if j != m-1: # 存在gsy = move_by_gs(j, m, suffix, prefix)i += max(x, y)
return -1
生成字符串哈希表
def generate_bc(pattern, m, bc): for i in range(m): bc[ord[pattern[i]]] = i
好前缀预处理
def generate_gs(pattern, m, suffix, prefix): for i in range(m-1): k = 0 # pattern[:i+1]和pattern的公共后缀长度 for j in range(i, -1, -1): if pattern[j] == pattern[m-1-k]: k += 1 suffix[k] == j if j == 0: prefix[k] == True else: break
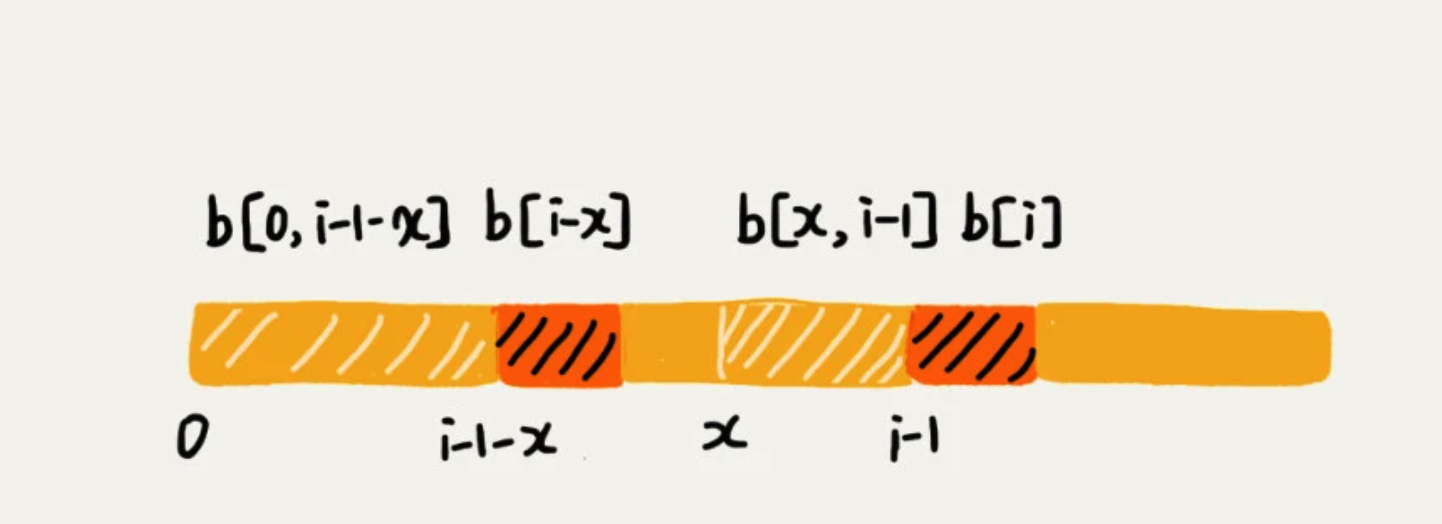
通过好后缀计算移动值,存在三种情况:
1、整个好后缀在pattern扔能找到
2、好后缀存在 后缀子串 能和 pattern 的 前缀 匹配
3、其他
def move_by_gs(j, m, suffix, prefix): k = m - 1 - j # j指向从后往前的第一个坏字符,k是此次匹配的好后缀的长度
if suffix[k] != -1: # 1. 整个好后缀在pattern剩余字符中仍有出现return j - suffix[k] + 1else:for r in range(j+2, m): # 2. 后缀子串从长到短搜索if prefix[m-r]:return rreturn m # 3. 其他情况
4、KMP算法
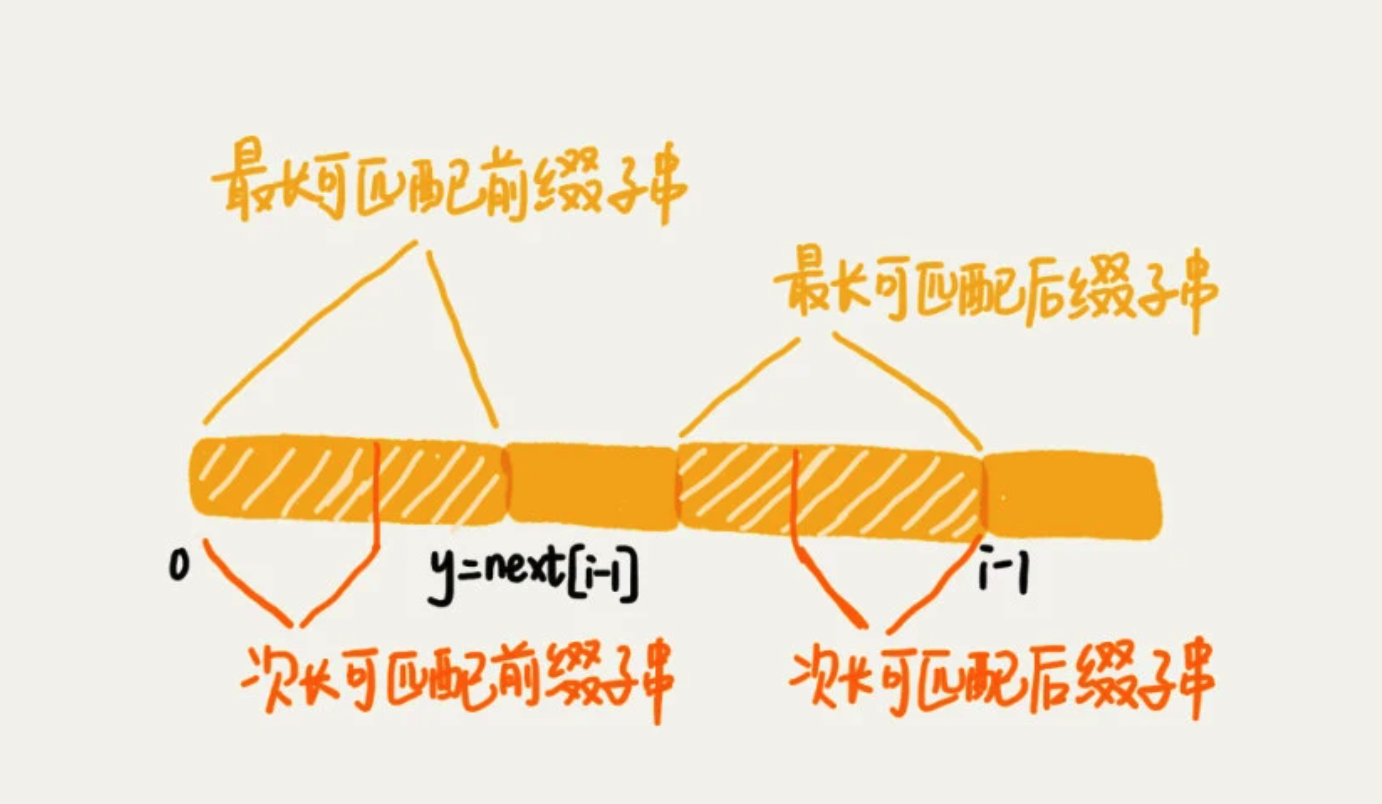
当遇到坏字符的时候,需要把模式串往后滑动。在滑动中,只要好前缀的后缀子串与模式串的前缀子串比较会更加高效。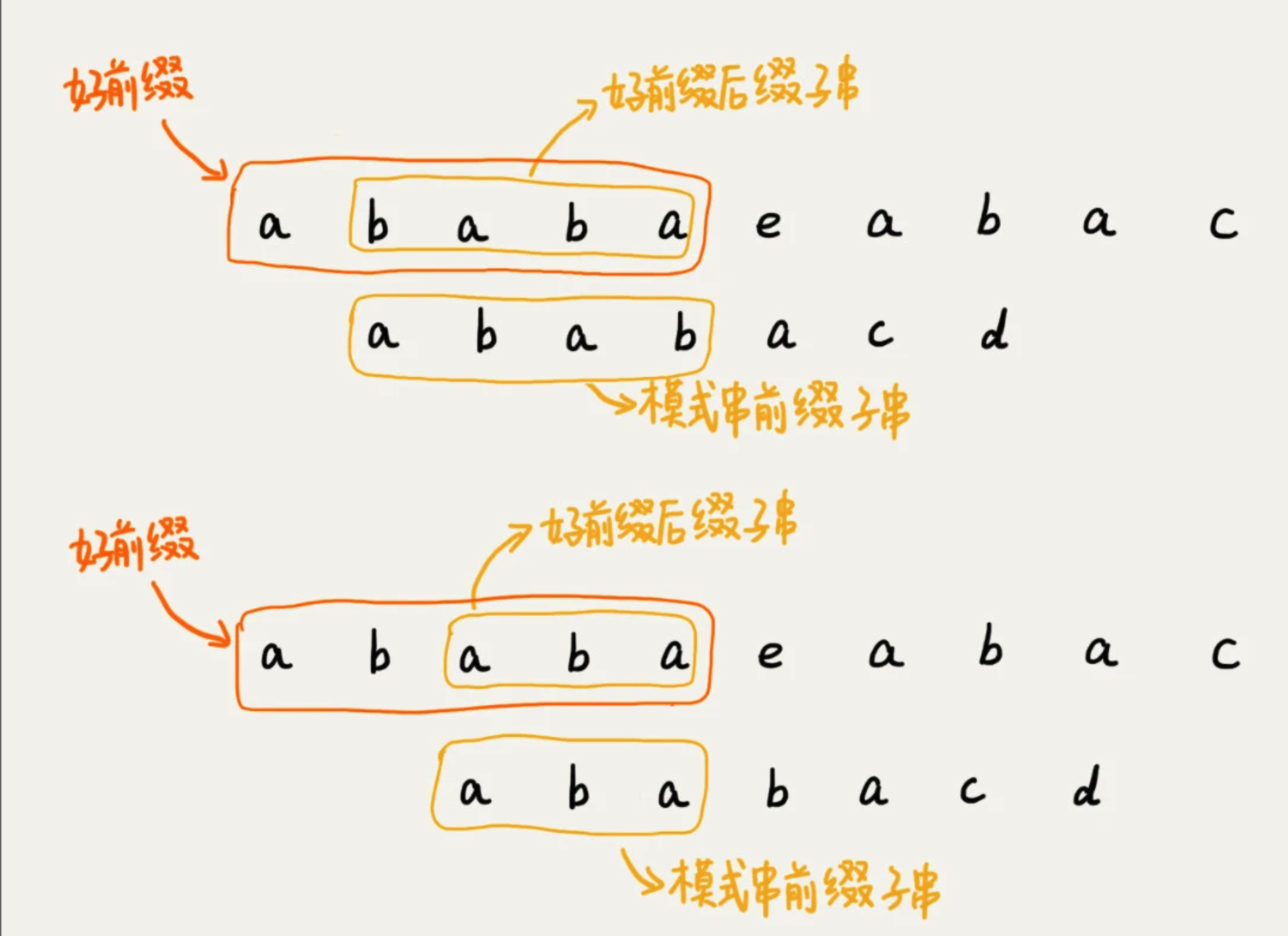
我们将好前缀的后缀子串中与 模式串 匹配最长的叫 最长可匹配后缀子串
对应的前缀子串,叫 最长可匹配的前缀子串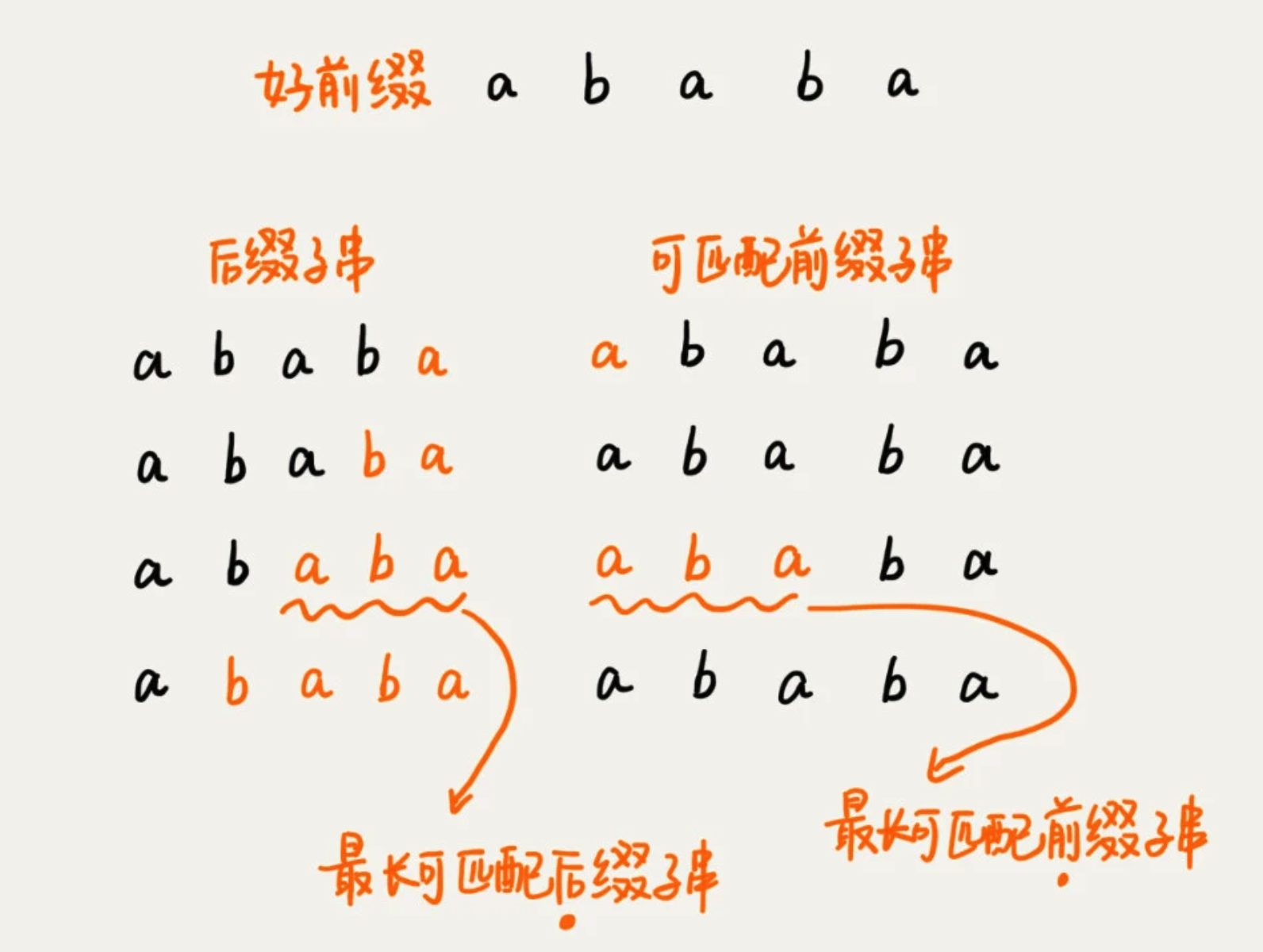
失效函数
构建一个数组,用来存储模式串中每个前缀的最长可匹配子串的结尾字符的下标,称为 next数组。又称 失效函数 failure function。
数组的下标是每个前缀结尾字符下标,数组的值就是这个前缀的最长可以匹配前缀子串的结尾下标。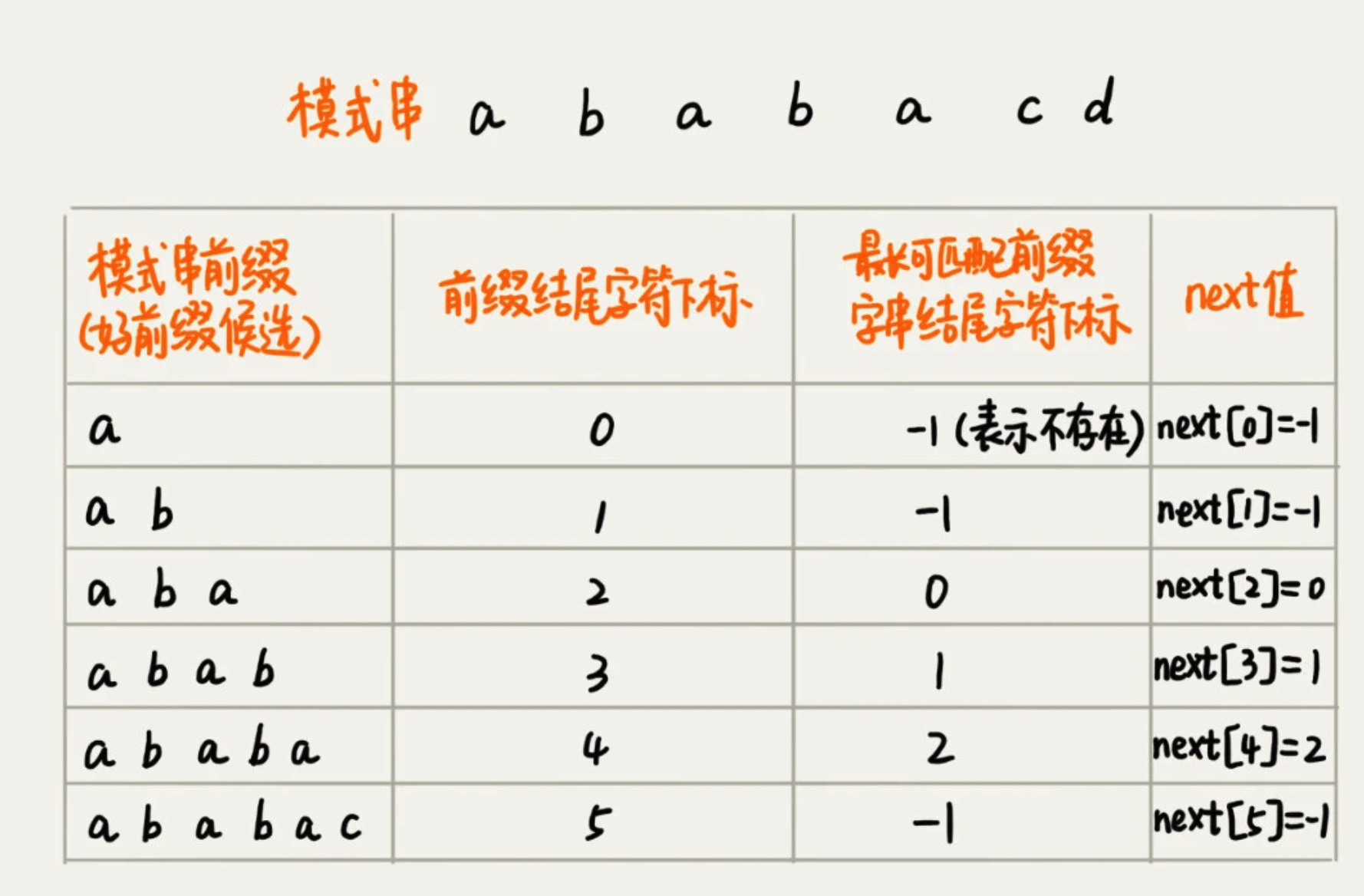
比如当模式串前缀是 a,那么它的后缀子串是空,所以next是-1
当模式串前缀是 a b a b a,那么它的后缀子串会存在四种情况,而与模式串的前缀子串匹配的右两个。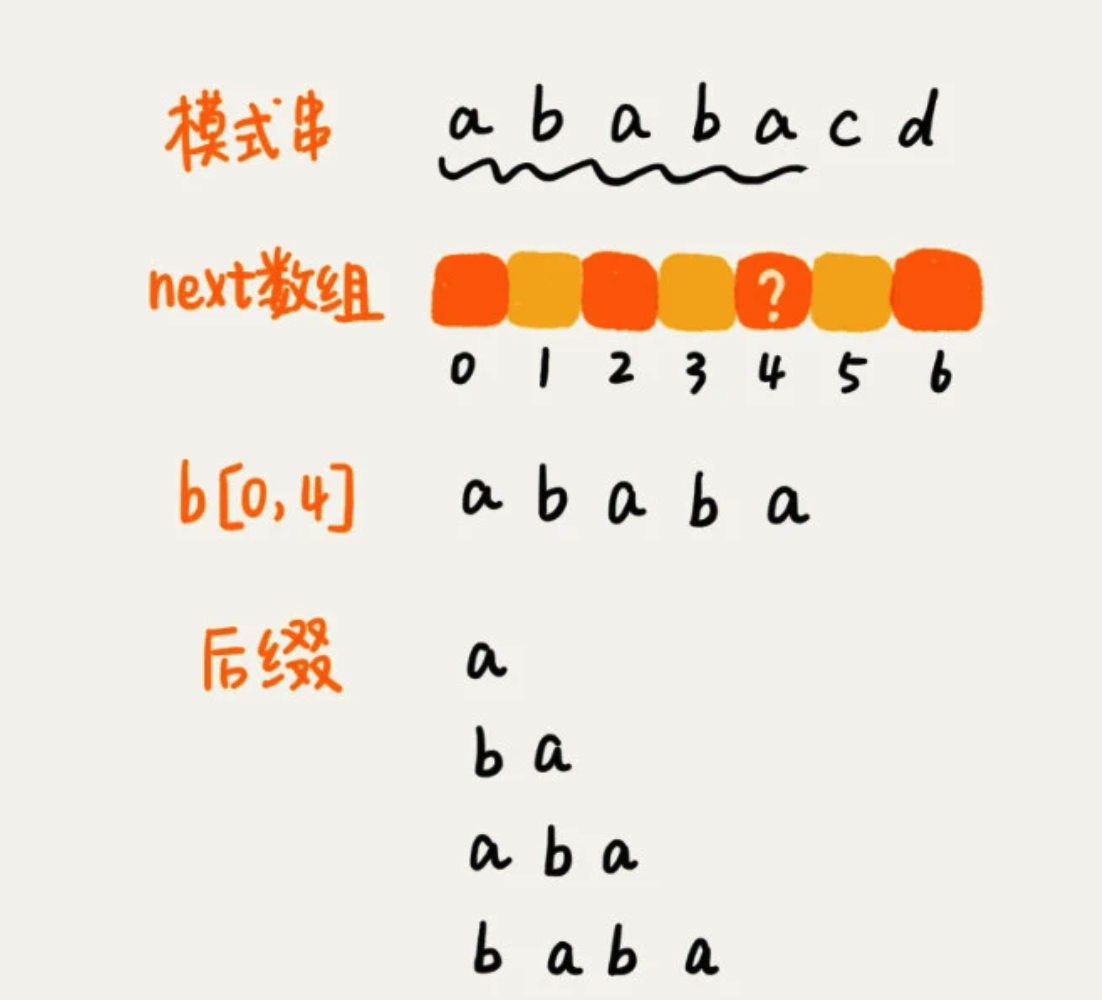
这种方法比较耗时,因此通过变量 i 和k来进行求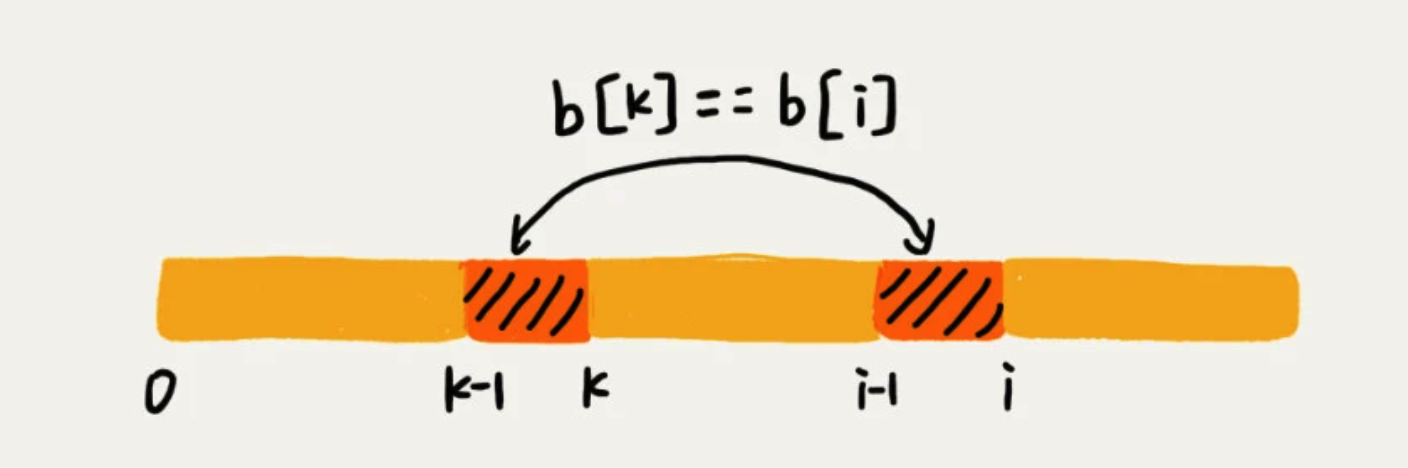
- 空间复杂度:O(m),需要一个next数组,其大小跟模式串长度m相同
时间复杂度:O(m+n),O(m)是next数组计算的耗时,O(n)是第二部分耗时
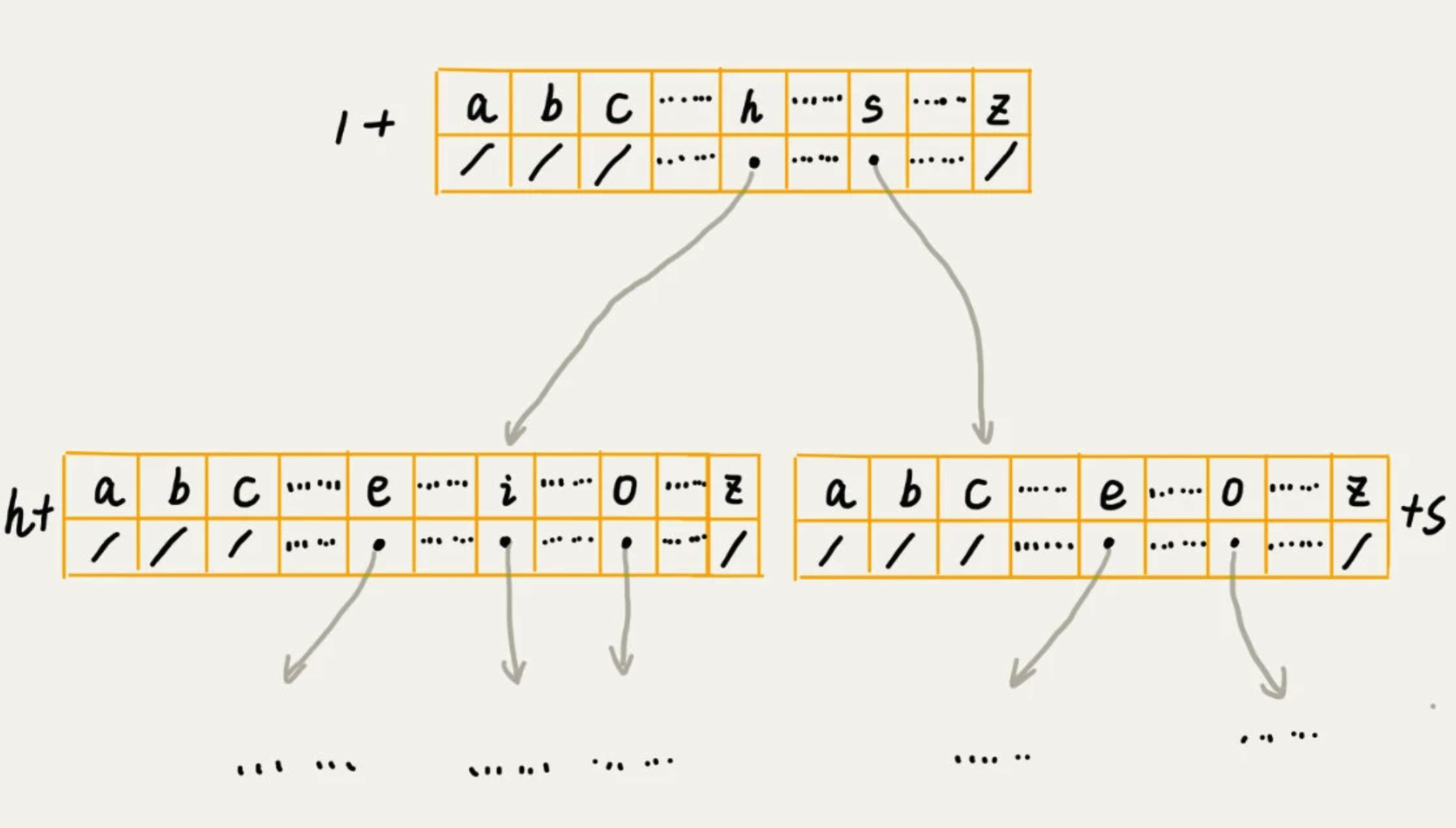
5、Tire树
也叫“字典树”,一种树形结构,专门处理字符串匹配的数据结构,用来解决一组字符串集合中快速查找某个字符串的问题。
有 6 个字符串,它们分别是:how,hi,her,hello,so,see。
1、实现
通过一个下标与字符一一对应的数组,来存储子节点的指针。
查找的时间复杂度,为 O(n),n是所有字符串的长度和。
空间复杂度,取决于指针的存储方式。6、AC自动机 Aho-Corasick
1、构建
将多个模式串构建成 Trie树
- 在Tire上构建失败指针
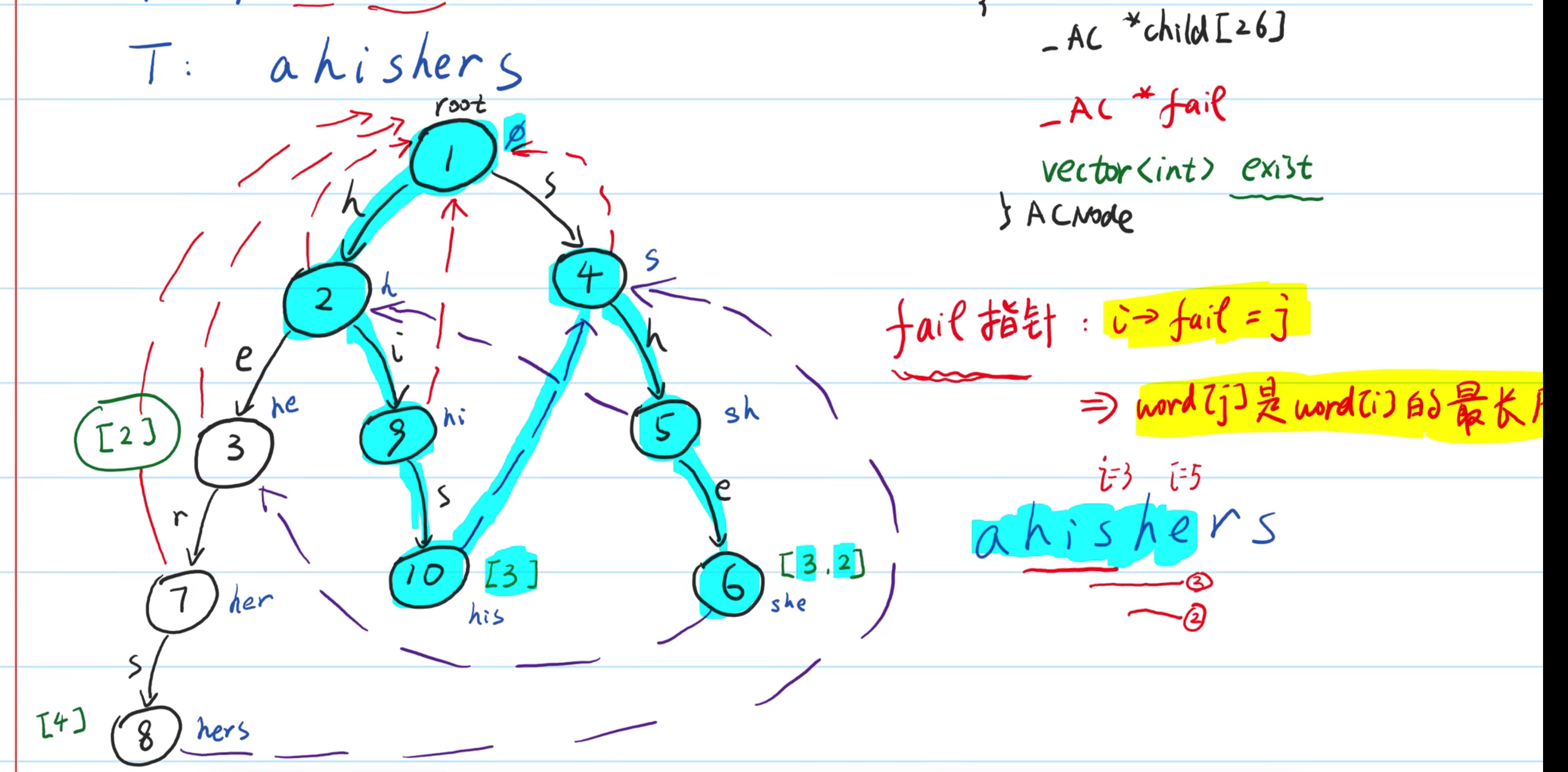
失败指针可以避免,匹配到一个模式串时,再用原来位置去匹配其他模式串。

若有收获,就点个赞吧
0 人点赞
