核心思想:错误驱动

有一些数据 ,这些数据样本分别属于两个不同的类别。现在用一个超平面将两类样本分开,位于超平面上方的样本打上标签+1(图中绿色的点),下方的打上标签-1(图中红色的点)。那么每个数据样本
,这些数据样本分别属于两个不同的类别。现在用一个超平面将两类样本分开,位于超平面上方的样本打上标签+1(图中绿色的点),下方的打上标签-1(图中红色的点)。那么每个数据样本 都有一个标签
都有一个标签 ,表明其所属的类别。
,表明其所属的类别。
记该超平面方程为 (在每个数据样本开头添一位数据1,这样超平面方程仍然是
(在每个数据样本开头添一位数据1,这样超平面方程仍然是 的形式,事实上上一节逻辑回归的超平面方程也可以这么写),那么被分类正确的点有
的形式,事实上上一节逻辑回归的超平面方程也可以这么写),那么被分类正确的点有 ,被分类错误的点有
,被分类错误的点有 。
。
现在定义数据集的一个子集:
代表被错误分类的数据样本集合。
定义函数:
代表整个数据集被错误分类的“程度”。
由于对每个错误分类的数据样本 有
有 ,所以我们的目标是要找到
,所以我们的目标是要找到 使得
使得 最大,即使得
最大,即使得 最小,即找到:
最小,即找到:
梯度下降求目标参数
对 分别求偏导,有:
分别求偏导,有:
梯度下降法多次迭代即可求得目标参数 。
。
数据集及最终训练结果
数据集同上一节逻辑回归
设置梯度下降参数α=0.001,训练次数500000次,最终得到:
w = [304.008,21.07732141,-40.92316773]]
结果如下图: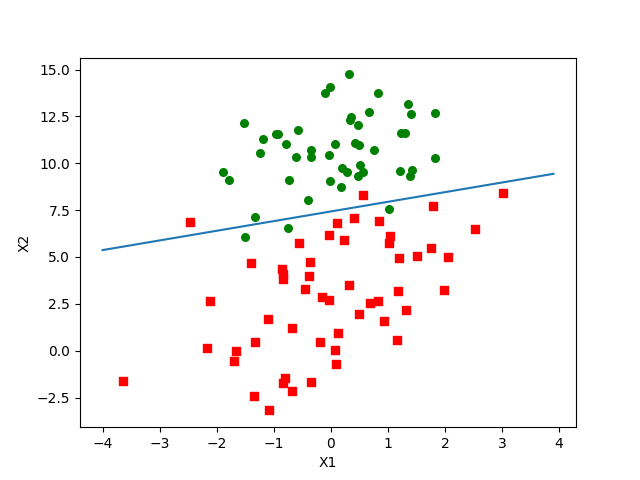

若有收获,就点个赞吧
0 人点赞
