tips:本文为学习的过程中做的笔记和总结如有错误欢迎指正。通过不同的坐标系统展开,梳理,把坐标系统和渲染相关知识系统化。
1.渲染管线
含义:类似于流水线工作 上一个阶段的输出作为下个阶段的输入。
应用阶段:
1. CPU上 计算场景中的基本数据。1. 加速算法,粗粒度剔除。可见光裁剪 可见场景物体裁剪1. 设置渲染状态,准备渲染参数。1. 输出渲染图元到显存。顶点数据,纹理贴图,MVP变换矩阵
几何阶段:(下边会详细分析一下几何阶段)
1. GPU上执行1. 顶点着色器1. 曲面细分1. 投影,把3d场景转换为2d场景1. 裁剪1. 屏幕映射
光栅化阶段:
1. 三角形设置1. 抗锯齿
逐片元操作:
1. 片源着色器1. 颜色混合1. 目标缓冲区
2.Object3D 基类(three.js)
- 继承它的子类:Scene、Camera、Mesh、Light
- 核心属性:matrix(本地矩阵) 、matrixWorld(世界矩阵)
3.坐标系
- 本地坐标系(局部坐标系):原点为模型位于世界坐标的位置。其他顶点以这个点为原点计算坐标。
- 世界坐标系:threejs中世界坐标单位为1 。这个1 没有实际的计量单位,如果想和物理世界里的计量单位关联可以等比进行计算。同时这个坐标长度也是无限的。(threejs是右手坐标系)
屏幕坐标系:也是OpenGL中默认的屏幕坐标系,原点位于屏幕左下角。向上为Y轴正方向,向右为X轴正方向。将NDC坐标系转换到屏幕坐标系需要用到视口变换。视口变换矩阵定义了屏幕坐标与NDC坐标的对应关系,不同分辨率的屏幕会有不同的视口变换矩阵。
浏览器坐标系(canvas坐标系):原点位于左上角。X轴正方向和屏幕坐标系是相同的,Y轴正方向和屏幕坐标系相反。
- 观察坐标系(相机坐标系):通过Scene渲染的场景内容并不是展现全部内用给用户,而是通过Camera的视锥体信息得到的空间,这个空间是实际展现给用户,以相机为原点的坐标系,也叫相机坐标系。
- 裁剪坐标系(投影坐标系):基于观察坐标系进一步优化需要渲染的场景范围。根据相机设置的fov和近截面远截面,截面宽高比决定的。
经过投影变换后坐标会多一个w分量(1,2,3,w)它用来描述一个点离观察点(观察坐标系的原点) 的距离所带来的影响
- 规范化设备坐标系(NDC)
规范化多设备坐标系统,设备多样性需要有一个统一的规范描述转换 为2D坐标后的点应该绘制在 屏幕 那个位置。从裁剪坐标系转换NDC坐标系需要用到透视除法,将xyz三个分量分别处以w分量。
NDC坐标都在-1到1之间。坐标原点位于场景的中心。x y 方向左正 上正
4.MVP矩阵
作用:GPU渲染3D图形 需要把3D图形的顶点通过变换和投影转换成2D纹理坐标。这个转换的过程就是
通过MVP矩阵左乘3D坐标的顶点得到的。
- M矩阵
含义:表示模型的旋转 平移 缩放
模型顶点左乘M矩阵作用:将模型转换到世界坐标系下
- V矩阵
含义:表示相机的 旋转 平移 缩放。注意渲染管线中使用的V矩阵是 是相机世界矩阵的 逆矩阵,因为
相机的旋转 缩放 平移 和 世界的是相反的。操作相机世界不动 和 操作世界相机不动。
模型顶点左乘完M矩阵再乘V矩阵的作用:把模型从世界坐标转换为视图坐标系
- P矩阵
含义:P矩阵是根据相机的视锥体信息构建的。
模型左乘M矩阵再乘V矩阵再乘P矩阵的效果:把模型从视觉坐标系转换到投影坐标系。
5.相机投影
- 投影:三维坐标下物的每个顶点, 投影到相同到平面上(通常在渲染阶段投影到屏幕上)。
- 正交投影相机
- 透视相机
- 进大远小
- 投影时射线之间不是平行的 ,是和近裁面和远裁面 顶点连线平行
- fov:是视锥体竖直方向上张角(角度)。人眼的fov一般为140度
- aspect:实际窗口的纵横比(一般为canvas的宽高比)
- near:近截面距离相机的距离
- far:远截面距离相机的距离
- 立方相机
- 立体相机
6.几何阶段分析
- 顶点着色器-视图变换 :参照第五点完成了从模型坐标转换到视图坐标。
- 曲面细分:根据算法在顶点之间进行插值,三角面变多,模型趋近于平滑。
- 几何着色器:操作对象为图元,基于一个给定到图元进行操作生成相关的图元。
- 投影:参照第五点完成了从视图坐标转换到投影坐标。
- 裁剪: 模型转换到NDC坐标系中后 如果顶点超过 [-1,1] 则超出了可视范围 会被裁剪。
- 屏幕映射:标准设备坐标系下的点映射到输出设备到屏幕坐标系中。两者存在转换关系。
8.归一化(坐标转换)
含义:通过上边几何阶段分析。知道了模型从世界坐标如何一步一步转换到屏幕坐标最终显示。
这个过程中存在一个重要到坐标系统规范。NDC 设备标准坐标系。它建立了从虚拟世界到物理
世界坐标转换的桥梁。所以如果从输出设备上(显示器屏幕)获得一个点,反向的也可以得到一
个模型的世界坐标系。正反的转换过程中都需要经过NDC坐标 这个过程就是归一化。
在推导公式之前需要先定义一些参数和概念:
推导对应的屏幕映射坐标系 为浏览器坐标系。
输出设备:高h 宽w
渲染画布(canvas):距离屏幕上方T 距离屏幕左边L 宽度cw 高度 ch
浏览器屏幕坐标:A(x,y)
NDC坐标系:B(a,b)
推导第一步:找到世界坐标系原点位于浏览器坐标系中点坐标。
cx = cw/2+L,
cy = ch/2+T
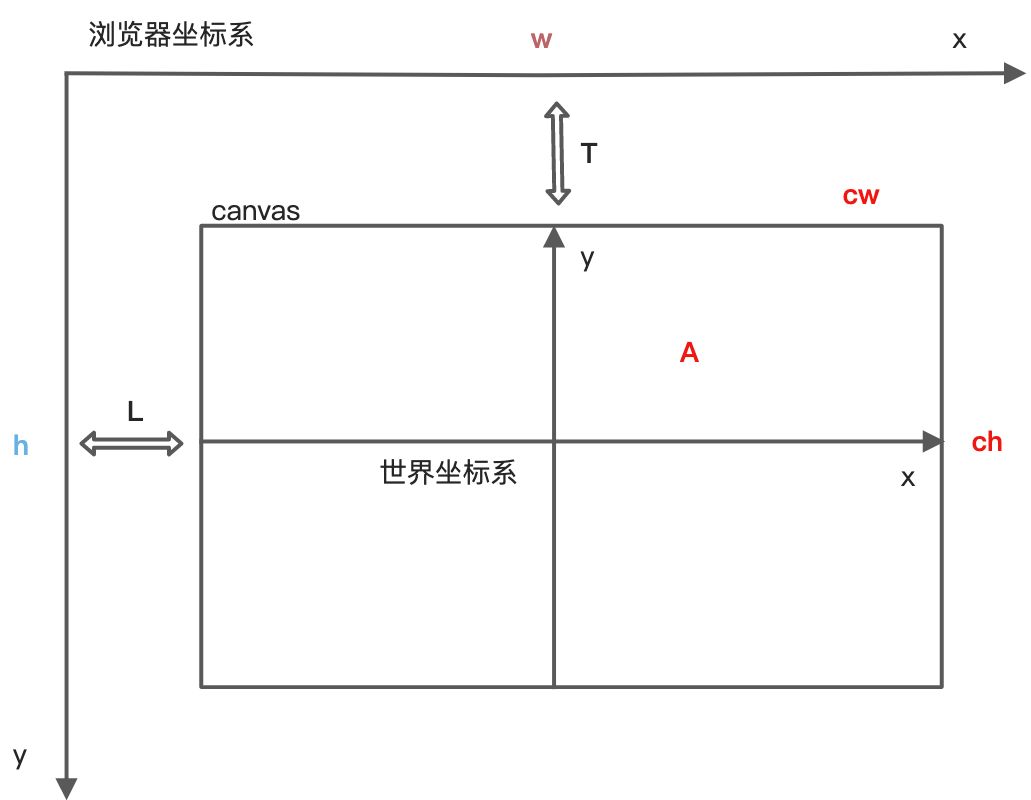
推导第二步:应用第一步坐标原点,推导 A坐标位于 世界坐标系中点位置A1(x1,y1)。注意这个位置单位是像素单位一般为px。至此浏览器坐标并未转换称为真正的世界坐标,而是把世界坐标单位和浏览器坐标单位看作是统一的,建立联系。
x1 = x-cx
y1 = cy-y(因为世界坐标和浏览器坐标y轴方向相反)
推导第三步:把 A1的坐标 按照比例缩小到[-1,1]之间 ,除以 cw ch。
注意:这里的处理原理,因为NDC坐标系是和世界坐标系等比一致的。
x1/cx = (x-cx)/cw = (x+L)/cw-1/2
y1/cy = (cy-y)/ch = (T-y)/ch+1/2
至此把屏幕坐标带入 会得到一个归一化的坐标 。
屏幕坐标转世界坐标:在threejs中 vector3 的方法unproject。可以将NDC的这个归一化坐标转换为世界坐 标。这个方法逆向推导MVP矩阵过程,得到世界坐标。
世界坐标转屏幕坐标:思路还是首先需要得到一个标准化设备坐标,在three中 vector3 下的project方法根 据传入的相机经过MVP矩阵计算和透视分割算法得到了一个归一化坐标。这个归一化坐标 x1 y1。还是按照
占比乘上转换为屏幕坐标单位的世界坐标。得出实际距离cx cy的距离 。因为屏幕坐标系是向左为正 向右为
负。所以得到的距离原点的距离还需要加上一个半轴的距离和距离left 或 top的距离 最终是 x = x1*cw+cx
x= (x1cw)/2+cw/2+L
y = ch/2+T -(y1ch)/2
得出的结果可能和网上大部分转换给出的公式不同,这里是将canvas 未铺满的情况考虑 L T 为0 时 得到的公式与网上分析相同。
9.Render图(转载)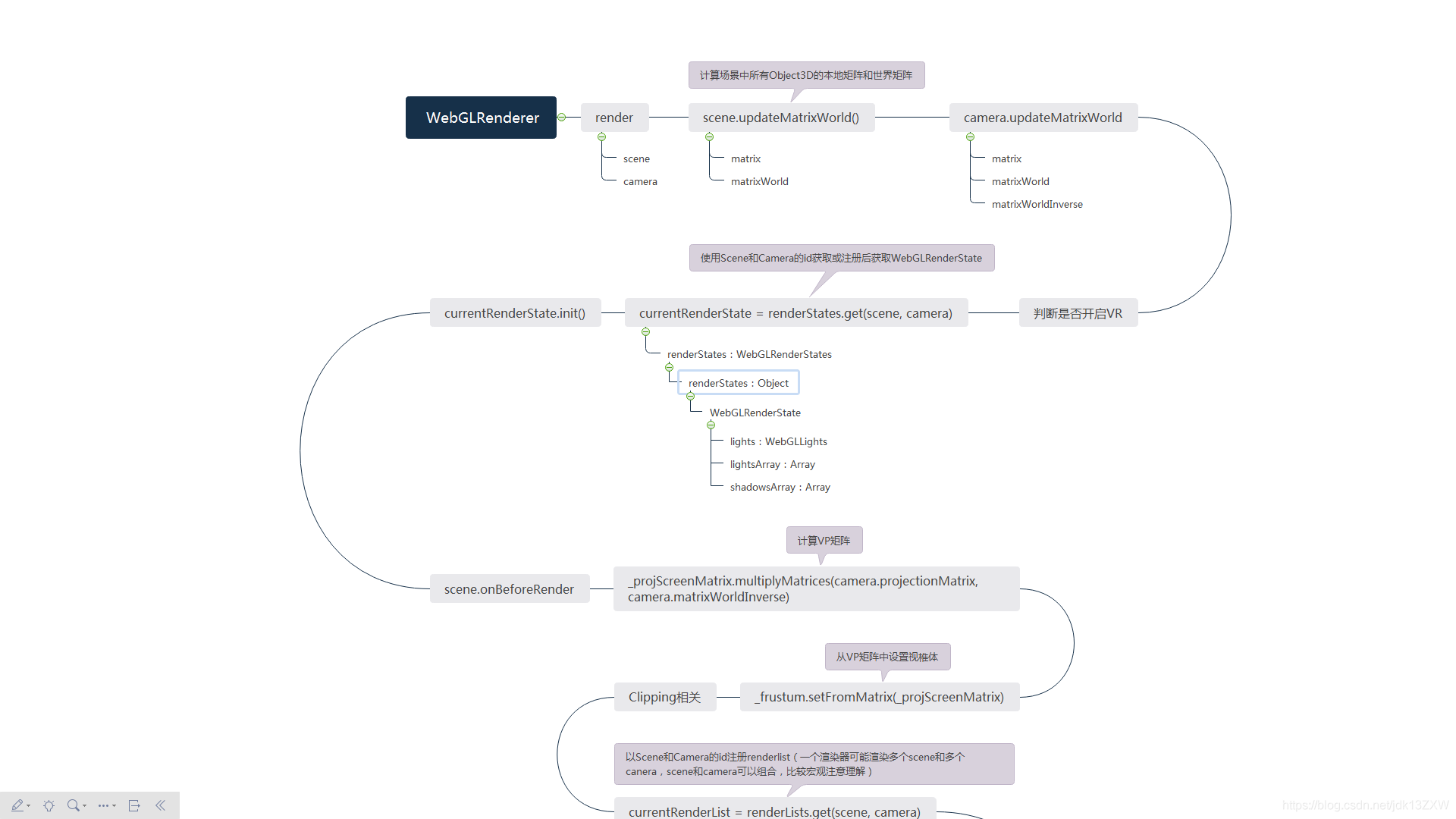
最后:下一篇要从几何数学入手 详细讲解 矩阵的运算 ,详细分析MPV。

若有收获,就点个赞吧
0 人点赞
