开篇语
Map是一种常用的kv数据结构,程序设计中经常使用,且作为一种最基础的数据结构,很多编程语言本身提供的api都会有实现,Go也不例外,今天我们将从一下三个方面为大家分析Go中的Map。
- 什么是Map?
- Go中如何使用Map?
- 以及Go的Map实现机制是什么样?
希望通过这几个方面的讲解,让大家真正理解Go的Map使用和实现。
什么是Map
key,value存储
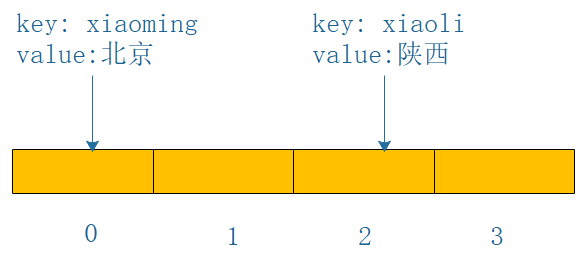
最通俗的话说Map是一种通过key来获取value的一个数据结构,其底层存储方式为数组,在存储时key不能重复,当key重复时,value进行覆盖,我们通过key进行hash运算(可以简单理解为把key转化为一个整形数字)然后对数组的长度取余,得到key存储在数组的哪个下标位置,最后将key和value组装为一个结构体,放入数组下标处,看下图:
length = len(array) = 4hashkey1 = hash(xiaoming) = 4index1 = hashkey1% length= 0hashkey2 = hash(xiaoli) = 6index2 = hashkey2% length= 2
hash冲突
如上图所示,数组一个下标处只能存储一个元素,也就是说一个数组下标只能存储一对key,value, hashkey(xiaoming)=4占用了下标0的位置,假设我们遇到另一个key,hashkey(xiaowang)也是4,这就是hash冲突(不同的key经过hash之后得到的值一样),那么key=xiaowang的怎么存储? hash冲突的常见解决方法
- 开放定址法
也就是说当我们存储一个key,value时,发现hashkey(key)的下标已经被别key占用,那我们在这个数组中空间中重新找一个没被占用的存储这个冲突的key,那么没被占用的有很多,找哪个好呢?常见的有线性探测法,线性补偿探测法,随机探测法,这里我们主要说一下线性探测法 线性探测,字面意思就是按照顺序来,从冲突的下标处开始往后探测,到达数组末尾时,从数组开始处探测,直到找到一个空位置存储这个key,当数组都找不到的情况下回扩容(事实上当数组容量快满的时候就会扩容了);查找某一个key的时候,找到key对应的下标,比较key是否相等,如果相等直接取出来,否则按照顺寻探测直到碰到一个空位置,说明key不存在。如下图:
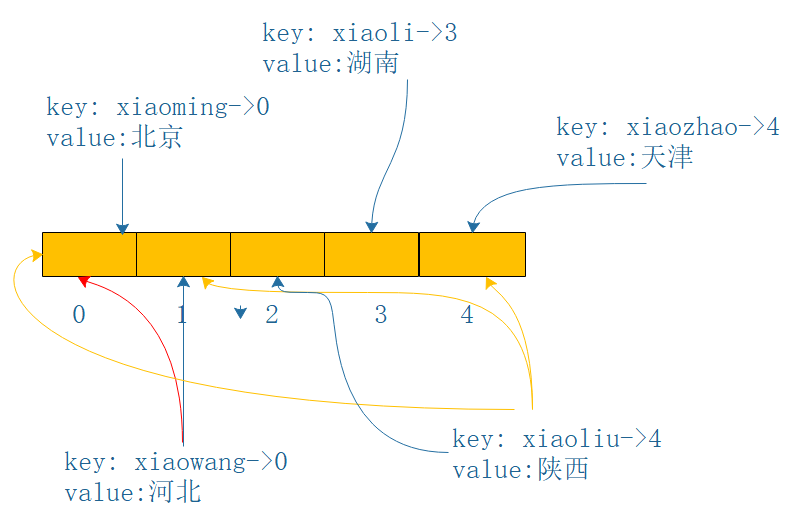
首先存储key=xiaoming在下标0处,当存储key=xiaowang时,hash冲突了,按照线性探测,存储在下标1处,(红色的线是冲突或者下标已经被占用了) 再者key=xiaozhao存储在下标4处,当存储key=xiaoliu是,hash冲突了,按照线性探测,从头开始,存储在下标2处 (黄色的是冲突或者下标已经被占用了)
- 拉链法
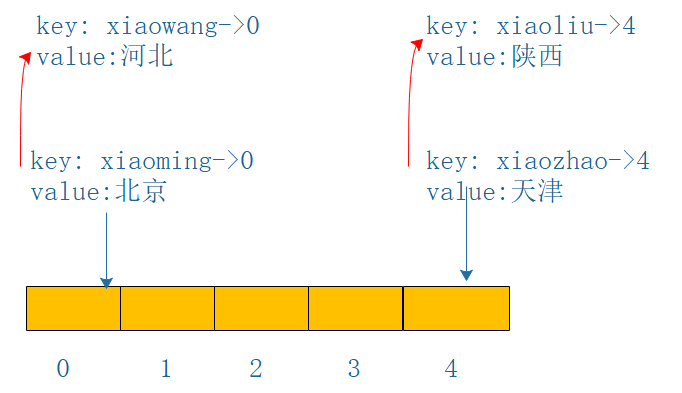
何为拉链,简单理解为链表,当key的hash冲突时,我们在冲突位置的元素上形成一个链表,通过指针互连接,当查找时,发现key冲突,顺着链表一直往下找,直到链表的尾节点,找不到则返回空,如下图:
- 开放定址(线性探测)和拉链的优缺点
//直接创建初始化一个maovar mapInit = map[string]string {"xiaoli":"湖南", "xiaoliu":"天津"}//声明一个map类型变量,//map的key的类型是string,value的类型是stringvar mapTemp map[string]string//使用make函数初始化这个变量,并指定大小(也可以不指定)mapTemp = make(map[string]string,10)//存储key ,valuemapTemp["xiaoming"] = "北京"mapTemp["xiaowang"]= "河北"//根据key获取value,//如果key存在,则ok是true,否则是flase//v1用来接收key对应的value,当ok是false时,v1是nilv1,ok := mapTemp["xiaoming"]fmt.Println(ok,v1)//当key=xiaowang存在时打印valueif v2,ok := mapTemp["xiaowang"]; ok{fmt.Println(v2)}//遍历map,打印key和valuefor k,v := range mapTemp{fmt.Println(k,v)}//删除map中的keydelete(mapTemp,"xiaoming")//获取map的大小l := len(mapTemp)fmt.Println(l)
看了上面的map创建,初始化,增删改查等操作,我们发现go的api其实挺简单易学的
Go中Map的实现原理
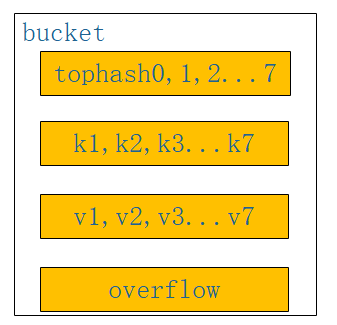
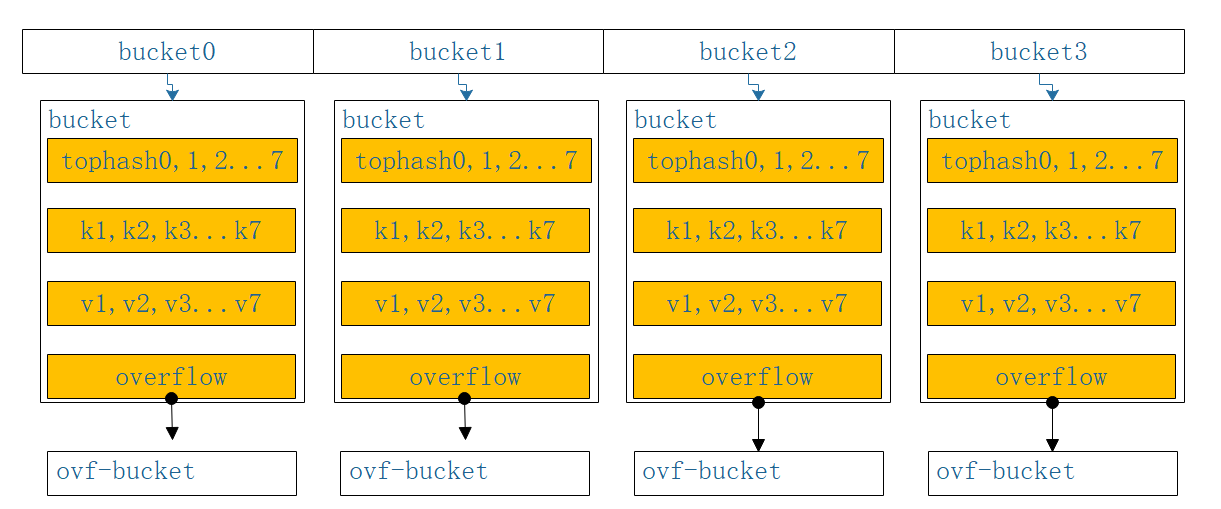
知其然,更得知其所以然,会使用map了,多问问为什么,go底层map到底怎么存储呢?接下来我们一探究竟。 map的源码位于 src/runtime/map.go中 笔者go的版本是1.12 在go中,map同样也是数组存储的的,每个数组下标处存储的是一个bucket,这个bucket的类型见下面代码,每个bucket中可以存储8个kv键值对,当每个bucket存储的kv对到达8个之后,会通过overflow指针指向一个新的bucket,从而形成一个链表,看bmap的结构,我想大家应该很纳闷,没看见kv的结构和overflow指针啊,事实上,这两个结构体并没有显示定义,是通过指针运算进行访问的。
//bucket结构体定义 b就是buckettype bmap{// tophash generally contains the top byte of the hash value// for each key in this bucket. If tophash[0] < minTopHash,// tophash[0] is a bucket evacuation state instead.//翻译:top hash通常包含该bucket中每个键的hash值的高八位。如果tophash[0]小于mintophash,则tophash[0]为桶疏散状态//bucketCnt 的初始值是8tophash [bucketCnt]uint8// Followed by bucketCnt keys and then bucketCnt values.// NOTE: packing all the keys together and then all the values together makes the// code a bit more complicated than alternating key/value/key/value/... but it allows// us to eliminate padding which would be needed for, e.g., map[int64]int8.// Followed by an overflow pointer.//翻译:接下来是bucketcnt键,然后是bucketcnt值。注意:将所有键打包在一起,然后将所有值打包在一起,使得//代码比交替键/值/键/值/更复杂。但它允许//我们消除可能需要的填充,例如map[int64]int8./后面跟一个溢出指针}
看上面代码以及注释,我们能得到bucket中存储的kv是这样的,tophash用来快速查找key值是否在该bucket中,而不同每次都通过真值进行比较;还有kv的存放,为什么不是k1v1,k2v2….. 而是k1k2…v1v2…,我们看上面的注释说的 map[int64]int8,key是int64(8个字节),value是int8(一个字节),kv的长度不同,如果按照kv格式存放,则考虑内存对齐v也会占用int64,而按照后者存储时,8个v刚好占用一个int64,从这个就可以看出go的map设计之巧妙。
最后我们分析一下go的整体内存结构,阅读一下map存储的源码,如下图所示,当往map中存储一个kv对时,通过k获取hash值,hash值的低八位和bucket数组长度取余,定位到在数组中的那个下标,hash值的高八位存储在bucket中的tophash中,用来快速判断key是否存在,key和value的具体值则通过指针运算存储,当一个bucket满时,通过overfolw指针链接到下一个bucket。
go的map存储源码如下,省略了一些无关紧要的代码
func mapassign(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {//获取hash算法alg := t.key.alg//计算hash值hash := alg.hash(key, uintptr(h.hash0))//如果bucket数组一开始为空,则初始化if h.buckets == nil {h.buckets = newobject(t.bucket) // newarray(t.bucket, 1)}again:// 定位存储在哪一个bucket中bucket := hash & bucketMask(h.B)//得到bucket的结构体b := (*bmap)(unsafe.Pointer(uintptr(h.buckets) +bucket*uintptr(t.bucketsize)))//获取高八位hash值top := tophash(hash)var inserti *uint8var insertk unsafe.Pointervar val unsafe.Pointerbucketloop://死循环for {//循环bucket中的tophash数组for i := uintptr(0); i < bucketCnt; i++ {//如果hash不相等if b.tophash[i] != top {//判断是否为空,为空则插入if isEmpty(b.tophash[i]) && inserti == nil {inserti = &b.tophash[i]insertk = add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))val = add( unsafe.Pointer(b),dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize) )}//插入成功,终止最外层循环if b.tophash[i] == emptyRest {break bucketloop}continue}//到这里说明高八位hash一样,获取已存在的keyk := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))if t.indirectkey() {k = *((*unsafe.Pointer)(k))}//判断两个key是否相等,不相等就循环下一个if !alg.equal(key, k) {continue}// 如果相等则更新if t.needkeyupdate() {typedmemmove(t.key, k, key)}//获取已存在的valueval = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize))goto done}//如果上一个bucket没能插入,则通过overflow获取链表上的下一个bucketovf := b.overflow(t)if ovf == nil {break}b = ovf}if inserti == nil {// all current buckets are full, allocate a new one.newb := h.newoverflow(t, b)inserti = &newb.tophash[0]insertk = add(unsafe.Pointer(newb), dataOffset)val = add(insertk, bucketCnt*uintptr(t.keysize))}// store new key/value at insert positionif t.indirectkey() {kmem := newobject(t.key)*(*unsafe.Pointer)(insertk) = kmeminsertk = kmem}if t.indirectvalue() {vmem := newobject(t.elem)*(*unsafe.Pointer)(val) = vmem}typedmemmove(t.key, insertk, key)//将高八位hash值存储*inserti = toph.count++return val}

若有收获,就点个赞吧
0 人点赞
