
舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC 判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是0 度到180 度。 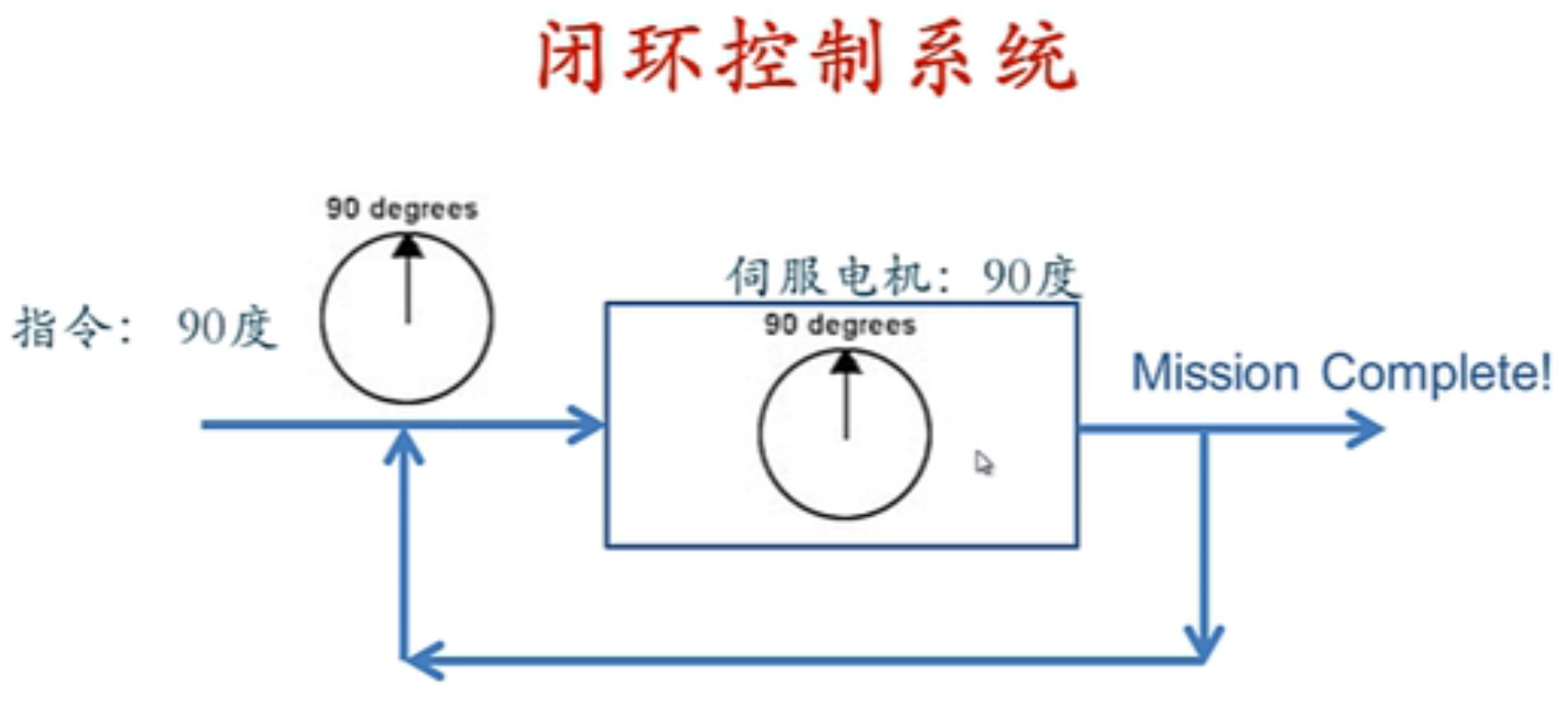
舵机有很多规格,但所有的舵机都有外接三根线,分别用黑、红、橙三种颜色进行区分,黑色为接地线,红色为电源正极线,橙色为信号线。 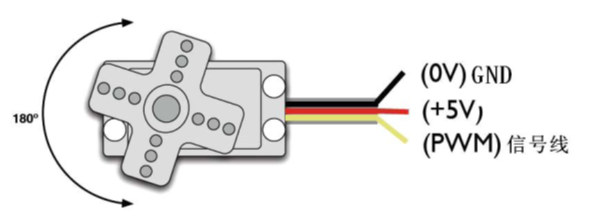
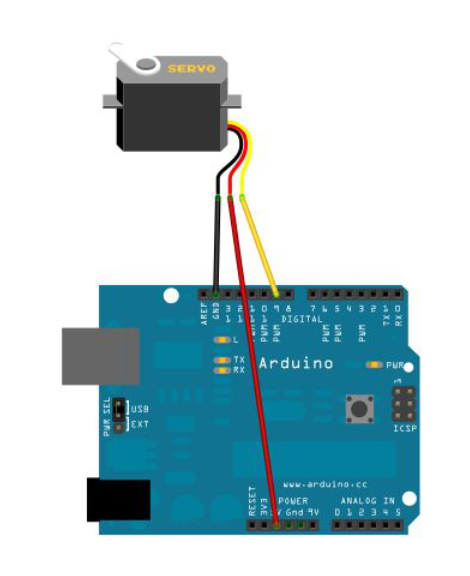
用Arduino 控制舵机的方法有两种,一种是通过Arduino的普通数字传感器接口产生占空比不同的方波,模拟产生PWM 信号进行舵机定位,第二种是直接利用Arduino自带的Servo库函数进行舵机的控制,这种控制方法的优点在于程序编写,缺点是只能控制2 路舵机,因为Arduino自带函数只能利用数字9、10 接口。Arduino 的驱动能力有限,所以当需要控制1 个以上的舵机时需要外接电源。
- 电路连接:
调用Servo库函数,例程在官方示例程序中: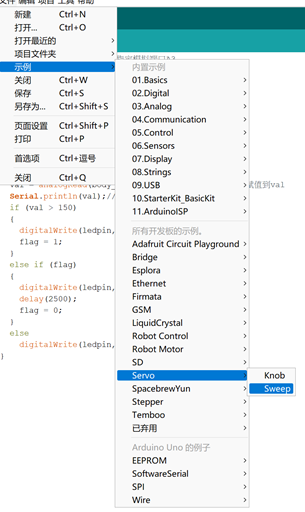

若有收获,就点个赞吧
0 人点赞
