- 灰度化
- 缩放
- 旋转
- 翻转
- 水平翻转
dst3 = cv2.flip(img1, 1)
# 垂直翻转
dst4 = cv2.flip(img1, 0)
# 水平垂直翻转
dst5 = cv2.flip(img1, -1) - 图像灰度化
img_arr = np.array(Image.open(‘a.jpg’).convert(‘L’)) - 将图像从空间域转换到频率域,傅里叶变换
f = np.fft.fft2(img_arr)
fshift = np.fft.fftshift(f) - 生成低通滤波器
F_filter1 = make_transform_matrix(img_arr, 30, ‘low’)
# 滤波
result = fshift * F_filter1
# 将图像从频率域转换到空间域,傅里叶反变换
img_d1 = np.abs(np.fft.ifft2(np.fft.ifftshift(result))) - 形态学处理
- 颜色处理
import numpy as np
import matplotlib.pyplot as plt from PIL
import Image
def image2array(image):
:param image: 图片
:return: 图片的数组
image = np.array(image)
return image
def array2image(arrimg):
:param arrimg: 图片的数组
:return: 图片
image = Image.fromarray(arrimg.astype(‘uint8’)).convert(‘RGB’)
return image
[
](https://blog.csdn.net/qq_43106863/article/details/103196747)
灰度化
输入:图,cv2.COLOR_BGR2GRAY(固定参数)
输出:灰度图
cv2.cvtColor()’, ‘最大值灰度化’,‘平均值灰度化’,‘Gamma校正灰度化
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)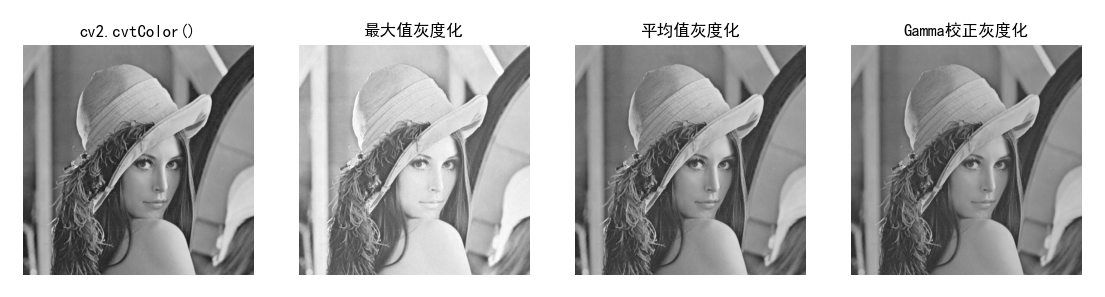
缩放
输入:图,灰度值
输出:灰度图
cv2.resize(src,dsize,fx=0,fy=0,interpolation=cv2.INTER_LINEAR)
cv2.INTER_LINEAR 双线性插值法
cv2.INTER_NEAREST 最近邻插值
cv2.INTER_AREA 像素区域重采样(默认)
cv2.INTER_CUBIC 双三次插值
cv2.INTER_LANCZ0S4 插值(超过8×8个邻域)
img1 = cv2.imread(“a.jpg”)
# 绝对尺寸
height,width = img1.shape[:2]
res = cv2.resize(img1,(2width,2height),interpolation=cv2.INTER_CUBIC)
# 相对尺寸
res1 = cv2.resize(img1,None,fx=0.3,fy=0.3)
旋转
输入:图,角度,缩放因子(一般为0.75)
输出:旋转图
rows, cols = img1.shape[:2]
# 这里(cols / 2, rows / 2)为旋转中心,60旋转角度,第三个为旋转后的缩放因子
# 可以通过设置旋转中心,缩放因子,以及窗口大小来防止旋转后超出边界的问题
M = cv2.getRotationMatrix2D((cols / 2, rows / 2), 60, 1)
dst2 = cv2.warpAffine(img1, M, (cols, rows))
翻转
输入:图,翻转模式code
输出:翻转图
cv2.flip(src, flipCode[, dst]) → dst1
flipCode – 翻转模式:
flipCode==0垂直翻转(沿X轴翻转)
flipCode>0水平翻转(沿Y轴翻转)
flipCode<0水平垂直翻转(先沿X轴翻转,再沿Y轴翻转,等价于旋转180°)
水平翻转
dst3 = cv2.flip(img1, 1)
# 垂直翻转
dst4 = cv2.flip(img1, 0)
# 水平垂直翻转
dst5 = cv2.flip(img1, -1)
仿射
输入:图,灰度值
输出:灰度图
仿射变换具体到图像中的应用,主要是对图像的缩放scale,
旋转rotate,剪切shear,翻转flip和平移translate的组合
pts1 = np.float32([[500,500],[2000,500],[500,2000]])
pts2 = np.float32([[100,1000],[2000,500],[1000,2500]])
M = cv2.getAffineTransform(pts1,pts2)
img2 = cv2.warpAffine(img1,M,(rows,cols))
透视
输入:图,灰度值
输出:灰度图
pts1 = np.float32([[200,200],[200,3000],[4800,200],[4800,3000]])
pts2 = np.float32([[200,200],[200,3000],[4800,600],[4800,2000]])
M = cv2.getPerspectiveTransform(pts1,pts2)
img3=cv2.warpPerspective(img1,M,(cols,rows),0.6)
平滑
输入:图,通带半径,类型
输出:滤波图
将代表了图像边缘、噪音或者变化陡峭的高频率成分滤除掉,只留下变化平缓的低频率成分,再由频域变换回时域,这就相当于对图像进行了平滑处理
def make_transform_matrix(image_arr, d0, ftype=’low’):
构建高斯高/低通滤波<br /> :param image_arr: 图像数组<br /> :param d0: 通带半径<br /> :param ftype: 类型<br /> :return: 滤波器<br /> <br /> # 构建滤波器<br /> transfor_matrix = np.zeros(image_arr.shape, dtype=np.float32) <br /> w, h = image_arr.shape<br /> for i in range(w):<br /> for j in range(h):<br /> # 求距离公式<br /> distance = np.sqrt((i - w / 2) ** 2 + (j - h / 2) ** 2)<br /> # Gaussian滤波函数<br /> transfor_matrix[i, j] = np.e ** (-1 * (distance ** 2 / (2 * d0 ** 2))) <br /> if ftype == 'low':<br /> return transfor_matrix<br /> elif ftype == 'high':<br /> return 1 - transfor_matrix
图像灰度化
img_arr = np.array(Image.open(‘a.jpg’).convert(‘L’))
将图像从空间域转换到频率域,傅里叶变换
f = np.fft.fft2(img_arr)
fshift = np.fft.fftshift(f)
生成低通滤波器
F_filter1 = make_transform_matrix(img_arr, 30, ‘low’)
# 滤波
result = fshift * F_filter1
# 将图像从频率域转换到空间域,傅里叶反变换
img_d1 = np.abs(np.fft.ifft2(np.fft.ifftshift(result)))
锐化
输入:图,通带半径,类型
输出:滤波图
滤去低频率成分,只留下高频率成分,就相当于对图像进行了锐化处理
伽马变换
输入:图,伽马值
输出:伽马变换图
def image_gamma_transform(pil_im, gamma):
伽马变换
:param pil_im: 图片
:return: 处理后的图片
image_arr = np.array(pil_im)
image_arr2 = exposure.adjust_gamma(image_arr, gamma)
return array2image(image_arr2)
def image_gamma_transform2(pil_im, gamma):
伽马变换2(源码实现)
:param pil_im: 图片
:return: 处理后的图片
image_arr = np.array(pil_im)
image_arr2 = np.power(image_arr / float(np.max(image_arr)), gamma)
return array2image(image_arr2*float(np.max(image_arr)))
对数增强
输入:图
输出:对数增强图
def image_log_transform(pil_im):
图像对数增强
:param pil_im: 图片
:return: 处理后的图片
image_arr = image2array(pil_im)
if len(image_arr.shape) == 3:
for i in range(3):
image_arr[:,:,i] = 255/np.log(255+1)np.log(1+image_arr[:,:,i])
return array2image(image_arr)
elif len(image_arr.shape) == 2:
# image_arr = 255/np.log(np.max(image_arr)+1)np.log(1+image_arr)
image_arr = 255/np.log(255+1)*np.log(1+image_arr)
return array2image(image_arr)
直方图
输入:图
输出:直方图
def image_histeq(pil_im):
直方图均衡化
:param pil_im: 图片
:return: 处理后的图片
# 计算图像的直方图
image_arr = image2array(pil_im)
imhist, bins = np.histogram(image_arr.flatten(), 256, normed=True)
cdf = imhist.cumsum() # 累计分布函数
cdf = 255*cdf/cdf[-1] # 归一化
# 使用累计分布函数的线性插值计算新的像素值
image_arr2 = np.interp(image_arr.flatten(), bins[:-1], cdf)
return array2image(image_arr2.reshape(image_arr.shape))
均值滤波
输入:图
输出:均值滤波图
def image_mean_filter(pil_im):
均值滤波
:param pil_im: 图片
:return: 处理后的图片
image_arr = image2array(pil_im)
dst_arr = np.zeros_like(image_arr)
# 卷积核-均值算子
mean_operator = np.array([[1, 1, 1],
[1, 1, 1],
[1, 1, 1]]) / 9
if len(image_arr.shape) == 3:
for i in range(3):
dst_arr[:, :, i] = convolve2d(image_arr[:, :, i], mean_operator, mode=”same”)
elif len(image_arr.shape) == 2:
dst_arr = convolve2d(image_arr, mean_operator, mode=”same”)
return array2image(dst_arr)
中值滤波
输入:图,sigma
输出:中值滤波图
def image_medium_filter(pil_im, sigma=5):
中值滤波
中值平滑只对特别尖锐的信号平滑
:param pil_im: 图片
:return: 处理后的图片
image_arr = image2array(pil_im)
if len(image_arr.shape) == 3:
for i in range(3):
image_arr[:,:,i] = filters.median_filter(image_arr[:,:,i], sigma)
return image_arr
elif len(image_arr.shape) == 2:
image_arr = filters.median_filter(image_arr, sigma)
return array2image(image_arr)
拉普拉斯算子
输入:图,sigma
输出:拉普拉斯算子增强图
def image_laplace_filter(pil_im,sigma):
拉普拉斯算子增强
sigma越大图像越模糊
image_arr = np.array(pil_im)
dst_arr = np.zeros(image_arr.shape, dtype=np.uint8)
filter_arr = dst_arr
# 卷积核-拉普拉斯算子
laplace_operator = np.array([[0, -1, 0],
[-1, 4, -1],
[0, -1, 0]])
if len(image_arr.shape) == 3:
for i in range(3):
dst_arr[:,:,i] = convolve2d(image_arr[:,:,i], laplace_operator, mode=”same”)
filter_arr[:,:,i] = filters.gaussian_filter(dst_arr[:,:,i], sigma)
elif len(image_arr.shape) == 2:
dst_arr = convolve2d(image_arr, laplace_operator, mode=”same”)
filter_arr = filters.gaussian_filter(dst_arr, sigma)
dst_arr = image_arr + filter_arr
dst_arr = dst_arr / 255.0
# 饱和处理
mask_1 = dst_arr < 0
mask_2 = dst_arr > 1
dst_arr = dst_arr (1-mask_1)
dst_arr = dst_arr (1-mask_2) + mask_2
return array2image(dst_arr*255)
图像去噪-cv2.blur()、cv2.medianBlur()、cv2.filter2D()、cv2.GuassianBlur()
形态学处理
腐蚀
腐蚀会把物体的边界腐蚀掉,卷积核沿着图象滑动,如果卷积核对应的原图的所有像素值为1,那么中心元素就保持原来的值,否则变为零。主要应用在去除白噪声,也可以断开连在一起的物体。
膨胀
卷积核所对应的原图像的像素值只要有一个是1,中心像素值就是1。一般在除噪是,先腐蚀再膨胀,因为腐蚀在去除白噪声的时候也会使图像缩小,所以我们之后要进行膨胀。当然也可以用来将两者物体分开。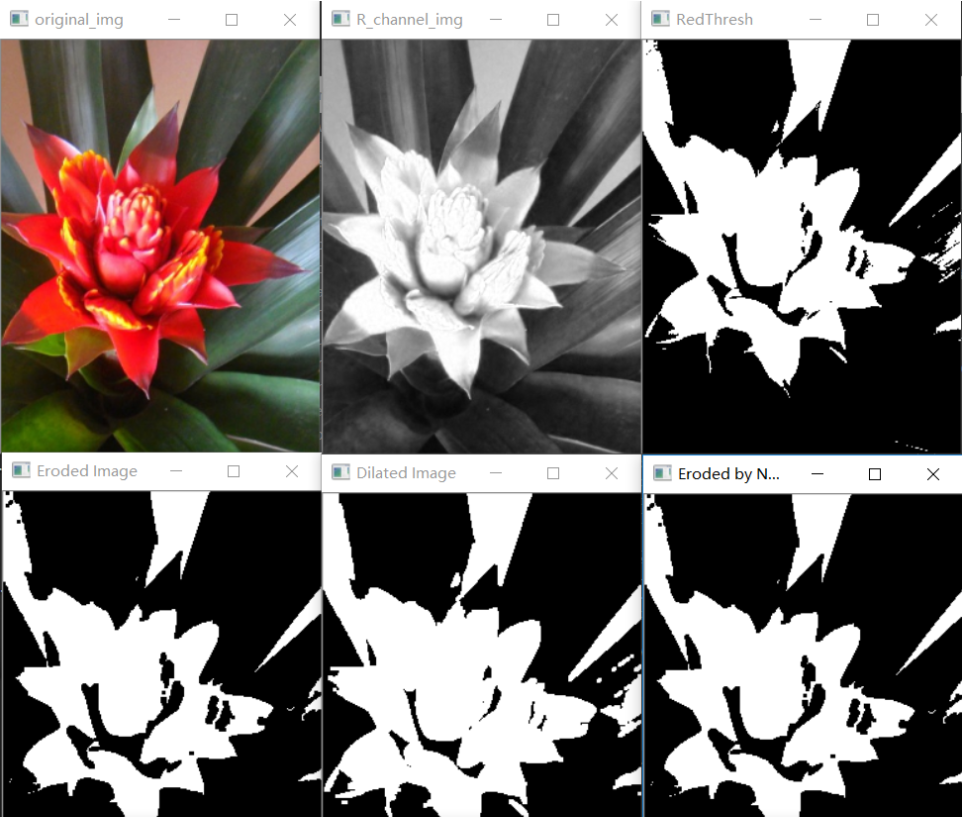
开运算
闭运算
梯度
形态学梯度 = dilation - erosion,用于提取物体轮廓
顶帽
顶帽 = src - open,用来分离比邻近点亮一些的斑块
bitwiseXor_gray = cv2.bitwise_xor(gray_img,TOPHAT_img)
该算法可以图像识别的预处理,用于图像二值化后去除孤立点
黑帽
黑帽 = src - close,用来分离比邻近点暗一些的斑块

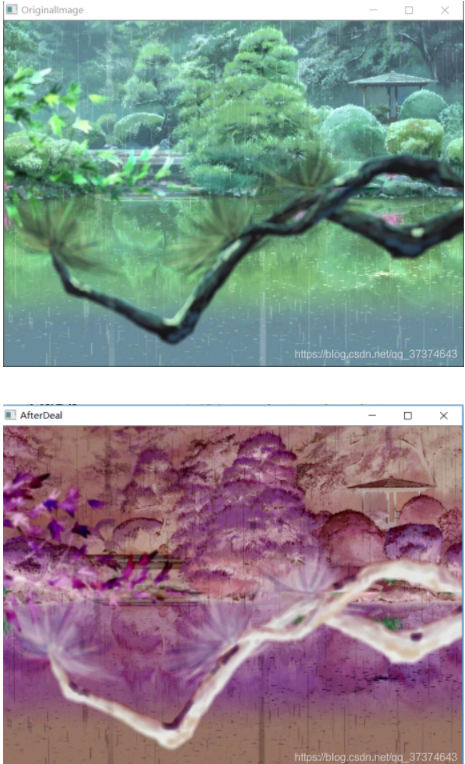
颜色处理
反色处理
import cv2 as cv
def access_pixels(image):
height, width, channels = image.shape
print(“width:%s,height:%s,channels:%s” % (width, height, channels))
for row in range(height):
for list in range(width):
for c in range(channels):
pv = image[row, list, c]
image[row, list, c] = 255 - pv
cv.imshow(“AfterDeal”, image)
src1 = cv.imread(“yanye.jpg”)
src = cv.resize(src1,(600,450),)
cv.imshow(‘OriginalImage’, src)
t1 = cv.getTickCount()
access_pixels(src)
t2 = cv.getTickCount()
print(“time cost:%s s” % ((t2 - t1) / cv.getTickFrequency()))
cv.waitKey()
伪彩色处理
import cv2
im_gray = cv2.imread(“H:/gdal/rs-data/result/ndvi.jpg”, cv2.IMREAD_GRAYSCALE)
im_color = cv2.applyColorMap(im_gray, cv2.COLORMAP_JET)
cv2.imwrite(‘H:/gdal/rs-data/result/ndvi_color.jpg’,im_color)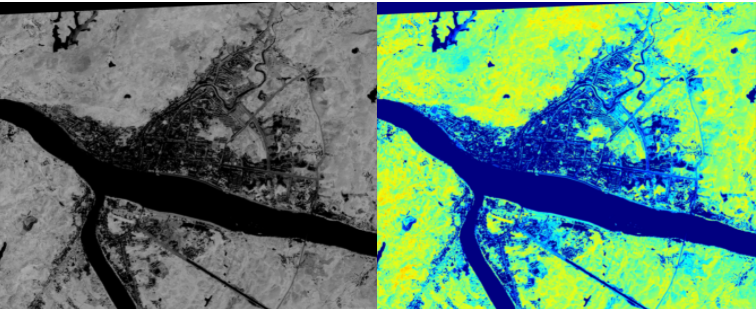
提取颜色
import cv2import numpy as np img = cv2.imread(‘c.png’) hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) lower_pink = np.array([160,20,20]) upper_pink = np.array([168,255,255]) mask = cv2.inRange(hsv, lower_pink, upper_pink) res = cv2.bitwise_and(img, img, mask= mask) cv2.imshow(‘frame’,img) cv2.imshow(‘mask’,mask) cv2.imshow(‘res’,res) cv2.waitKey(0) cv2.destroyAllWindows()

若有收获,就点个赞吧
0 人点赞
