以前学机器学习的时候,在 SVM 中遇到过拉格朗日对偶问题,后来学习强化学习看自然梯度以及 TRPO 也遇到了拉格朗日对偶问题。这里,就把凸优化中的一些内容,尤其是最优性条件以及拉格朗日对偶问题总结一下。
无约束优化问题的最优性条件
先考虑无约束非线性规划问题
其中决策变量  ,目标函数
,目标函数  。我们先引进下降方向的概念。
。我们先引进下降方向的概念。
下降方向
定义:设函数  。若存在
。若存在  使
使
则称  是
是  在
在  处的下降方向。
处的下降方向。
定理**:设  在 处可微,
在 处可微, 。若
。若  ,则称 是 在 处的下降方向。
,则称 是 在 处的下降方向。
这个定理是很显然的,梯度方向是函数值上升变化最大的方向,与它为钝角的方向就是函数值下降的方向。
记, ,则
,则  中元素均为 在 处的下降方向。
中元素均为 在 处的下降方向。
一阶最优性条件
一阶必要条件:设  在
在  处可微。若
处可微。若  是 (UNP) 的局部最优解,则
是 (UNP) 的局部最优解,则  。
。
这一点我们在高等数学里已经知道了,梯度为 0 的点是极值点的必要条件。一般的满足 的点我们称之为平稳点。
一阶充分条件:设 是  上的下凸函数,并在在 处可微。若 ,则 是 (UNP) 问题的全局最优解。这一点学过高数的都知道是显然的。
上的下凸函数,并在在 处可微。若 ,则 是 (UNP) 问题的全局最优解。这一点学过高数的都知道是显然的。
二阶最优性条件
二阶必要条件:设 在 处二阶连续可微。若 是 (UNP) 的局部最优解,则 , 半正定。
半正定。
这就是梯度为零向量,然后海森矩阵半正定。
二阶充分条件:设 在 处二阶连续可微。 , 正定。则 是 (UNP) 的严格局部最优解。
注意到,严格局部最优也可能是半正定的,正定是充分条件,半正定是必要条件。
**
这些最优性条件都可以用多元函数的泰勒展开证明,泰勒展开如下:

无约束二次规划问题的最优性条件
无约束二次规划问题的通用形式为:
其中  是对称矩阵,
是对称矩阵, 。
。
最优点的充要条件:设  。则 是 (UQP) 的最优解的充要条件是 ,
。则 是 (UQP) 的最优解的充要条件是 , 半正定。
半正定。
必要性:根据二阶必要条件, ,显然必要性没问题
,显然必要性没问题
充分性:由 为半正定矩阵可知, 是一个下凸的函数,对于下凸函数,平稳点一定是最优解。
约束优化问题的最优性条件
考虑约束非线性规划问题:
其中决策变量 ,可行域  。目标函数 。
。目标函数 。
可行方向
可行方向定义:设集合  ,
, 。若存在 ,使
。若存在 ,使
则称 是  在 处的可行方向。
在 处的可行方向。
对于  ,记
,记  为 在 处的可行方向集。
为 在 处的可行方向集。
可行下降方向定义:对于问题 (CNP),设 。若  ,并且 是 在 处的下降方向,则称 是 (CNP) 在 处的可行下降方向。
,并且 是 在 处的下降方向,则称 是 (CNP) 在 处的可行下降方向。
定理:设 , 在
在  处可微。若 是 (CNP) 的局部最优解,则
处可微。若 是 (CNP) 的局部最优解,则
这个定理是很显然的,极小值点是没有可行下降方向的。
下面分别分析线性约束集合和一般不等式约束集合的可行方向集。
带线性约束集合的可行方向集
设  ,其中
,其中  。若 ,则将
。若 ,则将  进行分块:
进行分块:

称 是 在 处对应于起作用约束的系数矩阵,
是 在 处对应于起作用约束的系数矩阵, 是 在 处对应于不起作用约束的系数矩阵。约束起作用时,这个点刚好在某个约束边界上,那个边界起作用。
是 在 处对应于不起作用约束的系数矩阵。约束起作用时,这个点刚好在某个约束边界上,那个边界起作用。
定理:设 ,若 ,并且公式 (1) 成立,则:
这个定理粗看起来很奇怪,其实一点都不奇怪,看了后面的部分就很容易理解了。下面,我们来粗略的证明:
证明:设 ,由于 是可行方向有:存在 ,使 ,故
由于  ,显然有
,显然有  。
。
一般不等式约束集合的可行方向集
现在考虑约束  记
记  。
。
对  ,记
,记  ,当
,当  时,称约束
时,称约束  为 在 处起作用的约束,或者称之为紧约束。再记:
为 在 处起作用的约束,或者称之为紧约束。再记:
为什么定义这两个符号,为什么这两个符号里有梯度,对约束函数进行泰勒展开就很显然了。
定理:设 ,。若 时  在 处可微,
在 处可微, 时 在 处连续,则
时 在 处连续,则  。当
。当  为线性函数时,
为线性函数时, 。
。
这个定理我们不证明,我们只需要知道:对于非线性约束,可行方向集在  之间就行了。这是很显然的事情,对于非线性约束,沿着切线(与梯度正交)的方向不是可行方向,而对于线性约束,沿着梯度垂直的方向是可行方向。
之间就行了。这是很显然的事情,对于非线性约束,沿着切线(与梯度正交)的方向不是可行方向,而对于线性约束,沿着梯度垂直的方向是可行方向。
推论:设 , 。 在
。 在  处可微, 若 时 在 处可微, 时 在 处连续。若 是 (CNP) 的局部最优解,则
处可微, 若 时 在 处可微, 时 在 处连续。若 是 (CNP) 的局部最优解,则
当 为线性函数时,有 
这里就是说,下降方向集与可行方向集的交集为空。一般老师,非线性等式约束和不等式约束结合在一起的话,一般没有可行方向了,但存在序列可行方向。就是只能沿着约束条件的弯曲的边界走。
序列可行方向
定义:设集合  ,,
,, 。若存在序列
。若存在序列  ,有:
,有: ,使
,使
则称 是 在 处的序列可行方向。
记  为 在 处的序列可行方向集,又称切锥。
为 在 处的序列可行方向集,又称切锥。
下面给出几个要点:
 是闭集和锥
是闭集和锥
- 设
 。若 是 (CNP) 的局部最优解,则 (CNP) 在 处不存在序列可行的下降方向。(显然,不证)
。若 是 (CNP) 的局部最优解,则 (CNP) 在 处不存在序列可行的下降方向。(显然,不证)
定义**:设 , 在 处可微。若 是 (CNP) 的局部最优解,则  。
。
现在考虑  时的序列可行方向集。
时的序列可行方向集。
记  。对 ,记
。对 ,记

定理**:设。若 , 时 在 处可微, 时
时  在 处可微,则
在 处可微,则  。当 和 为线性函数时,
。当 和 为线性函数时, 。
。
我们需要知道对于非线性等式约束,一般是没有可行方向的,只有序列可行方向。上面的定理也是很显然的东西。下面我们给出一个定理,但是不证明(不是很好证):
定理:设。若 , 时 在 处可微,, 时 在 处连续, 时 在 处可微, 线性无关,则
线性无关,则

通过以上两个定理我们知道:

定理:设。 是 (CNP) 的局部最优解, 在 处可微,  时 在 处可微,,
时 在 处可微,, 时 在 处连续, 时 在 处可微,有
时 在 处连续, 时 在 处可微,有
- 若 由线性约束组成,则

- 若 线性无关,则

一阶必要条件
我们现在讨论 时 (CNP) 的最优性条件,即考虑问题:
分别建立其 Fritz John 条件和 K-T 条件。
定理:Fritz John 条件,设 , 在 处可微, 时 在 处可微,, 时 在 处连续, 时 在 处可微,若 是 (CNP) 的局部最优解,则存在不全为 0 的  和
和  ,使
,使

简单说一下证明过程,我们已经知道了 ,这意味着

无解,根据择一性定理,就可以得到 Fritz John 条件了。
由于在 Fritz John 条件中,目标函数的梯度的系数可能刚好为 0 使 FJ 条件成立,这会导致梯度信息丢失,为了保证该系数不为 0 ,需要对可行域加一些约束规格,由此得到 K-T (Kuhn-Tucker) 条件。下面我们介绍两种约束规格。
- 线性约束规格:
 是线性函数。
是线性函数。 - 正则点约束规格: 是 的正则点,即
 线性无关。
线性无关。
定理:KKT 条件,设 , 在 处可微, 时 在 处可微,, 时 在 处连续, 时 在 处可微,若 是 (CNP) 的局部最优解,并且约束规格成立 (二选一) 则存在  和 ,使
和 ,使

这个定理比较好证明,就是在 FJ 条件中把  给消掉了。
给消掉了。
事实上,在约束规格下,有  。
。
当  在 处可微时,KKT 条件可以写成。
在 处可微时,KKT 条件可以写成。

加上优化问题中已有的约束条件,KKT 条件可以写为:

一般的我们称上面第一个式子为拉格朗日函数, 为拉格朗日乘子。
为拉格朗日乘子。
一阶充分条件
在凸性条件下,KKT 条件也是 (CNP) 的最优解的充分条件。
定理:**设 ,
,
 , 在 处可微。若 是 (CNP) 的 KKT 点,且 为凸函数,
, 在 处可微。若 是 (CNP) 的 KKT 点,且 为凸函数, 是凹函数,
是凹函数,  是线性函数, 则 是 (CNP) 问题的最优解.
是线性函数, 则 是 (CNP) 问题的最优解.
所以对于凸优化问题, 我们利用 KKT 条件, 解方程找到 KKT 点就行了. 但是对于非凸优化问题, KKT点不一定是局部最优解, 这时需要用二阶最优性条件判断.
约束二次规划问题的最优性条件
现在考虑特殊的非线性规划问题: 约束二次规划问题:
其中  是对称矩阵,
是对称矩阵,  . 记
. 记  . 设 是 (CQP) 的 KKT 点,
. 设 是 (CQP) 的 KKT 点,  是对应的拉格朗日乘子,
是对应的拉格朗日乘子,  满足条件:
满足条件:

 是
是  中与 对应的部分, 则 KKT 条件为:
中与 对应的部分, 则 KKT 条件为:

定理: 设 . 则 是 (CQP) 的局部最优解, 当且仅当存在  和
和  , 使
, 使

这个定理这里不证明, 注意: 这里的优化问题是一个非凸的问题.
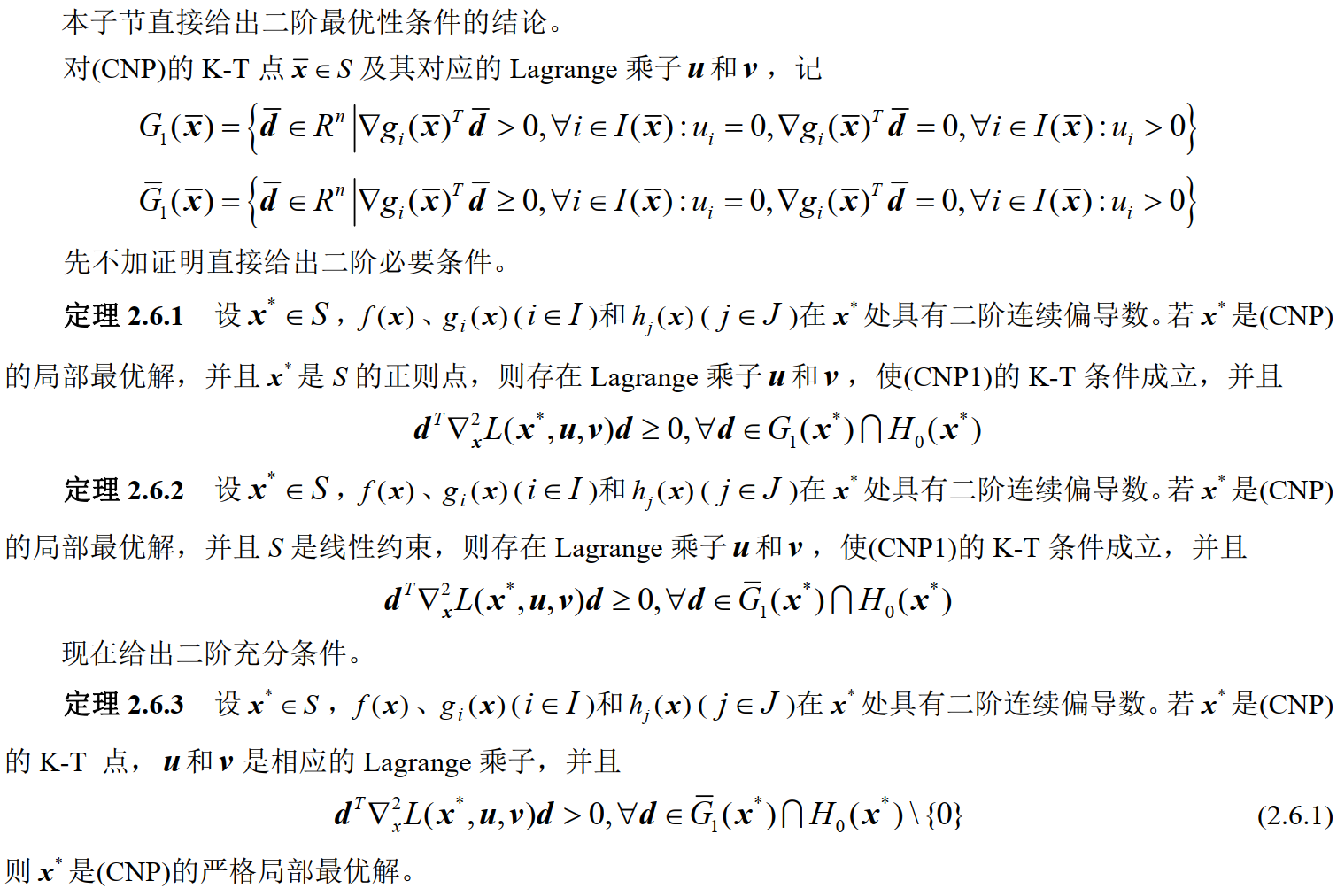
二阶最优性条件
对偶及鞍点问题
拉格朗日对偶问题
考虑非线性规划问题:
我们把上述问题的对偶问题定义为:
其中
 称为拉格朗日对偶函数.
称为拉格朗日对偶函数.
弱对偶定理:** 设  分别是原问题和对偶问题的可行解, 则
分别是原问题和对偶问题的可行解, 则
这是很显然的事情, 根据定义可以直接看出来. 下面我们根据弱对偶定理给出四个推论:
推论1: 对于原问题和对偶问题, 必有
这个推论就是把弱对偶定理抄了一遍.
推论2: 如果  , 其中
, 其中  , 则
, 则  分别是原问题和对偶问题的最优解.
分别是原问题和对偶问题的最优解.
推论3: 如果  , 则对每个
, 则对每个  , 有
, 有  .
.
推论4: 如果  , 则原问题没有可行解.
, 则原问题没有可行解.
根据弱对偶定理, 这四个推论都很显然. 我们根据弱对偶定理就知道, 一定有
如果等号不成立, 则称存在对偶间隙. 为了保证不存在对偶间隙, 我们需要加一些限定, 得到强对偶定理. 这里, 我们不加证明的给出强对偶定理.
强对偶定理: 设  是
是  中的一个非空凸集,
中的一个非空凸集,  分别是 上的凸函数和凹函数,
分别是 上的凸函数和凹函数,  是 上的线性函数, 即
是 上的线性函数, 即  , 又设存在点
, 又设存在点  , 使得
, 使得
则
且若上式中, inf 为有限值,则  在
在  达到, 其中
达到, 其中  . 如果 inf 在点
. 如果 inf 在点  达到, 必有
达到, 必有 
强对偶定理表明, 对于凸优化问题, 在适当的约束下(线性等式约束), 原问题的极小值与对偶问题的极大值是相等的.
鞍点与最优性条件
考虑非线性规划问题:
我们把上述问题的对偶问题定义为:
其中 称为拉格朗日对偶函数. 并且我们定义拉格朗日函数为 :
我们先定义拉格朗日函数的鞍点, 设  为拉格朗日函数,
为拉格朗日函数,  如果对每个
如果对每个 都有
都有
则称  为 的鞍点.
为 的鞍点.
鞍点定理: 设 是原问题拉格朗日函数的鞍点, 则  分别是原问题和对偶问题的最优解. 反之, 若 分别凸函数和凹函数, 是线性函数, 即 , 且
分别是原问题和对偶问题的最优解. 反之, 若 分别凸函数和凹函数, 是线性函数, 即 , 且  满秩. 又设存在
满秩. 又设存在  , 使 . 如果 是原问题的最优解, 则存在
, 使 . 如果 是原问题的最优解, 则存在  其中
其中  , 使 是拉格朗日函数的鞍点.
, 使 是拉格朗日函数的鞍点.
所以我们知道, 对于一般优化问题, 鞍点一定是最优解. 但注意到, 对于一般问题(非凸优化), 最优解不一定是拉格朗日函数的鞍点, 不能认为鞍点是最优解的必要条件, 鞍点是充分条件.
关于原问题拉格朗日函数的鞍点以及KKT条件, 有下面的定理**: 设在原问题中, 可行集为 , 满足 KKT 条件, 即找到了  满足 KKT 条件. 又设 为 凸函数,
满足 KKT 条件. 又设 为 凸函数,  为凹函数,
为凹函数,  为线性函数, 则 是原问题拉格朗日函数的鞍点. 反之, 设
为线性函数, 则 是原问题拉格朗日函数的鞍点. 反之, 设  可微, 若
可微, 若  是拉格朗日函数的鞍点, 则 满足 KKT 条件.
是拉格朗日函数的鞍点, 则 满足 KKT 条件.
所以我们知道: 对于一般优化问题, 鞍点一定满足 KKT 条件. 对于凸优化, 线性等式约束的优化问题, 满足 KKT 条件的点一定是鞍点.
**
参考文献
最优化理论与方法(第二版),陈宝林。

若有收获,就点个赞吧
0 人点赞
