差速两轮驱动¶
本章我们主要来给大家介绍差速两轮驱动结构.两轮差速转向结构,在学习这个内容之前我们需要理解一个公式:V=ω⋅r
由于小车是一个刚体,所以轮子的每个位置的角速度都是相同的, 而由于转弯半径不同,所以每个轮子的线速度会有所不同.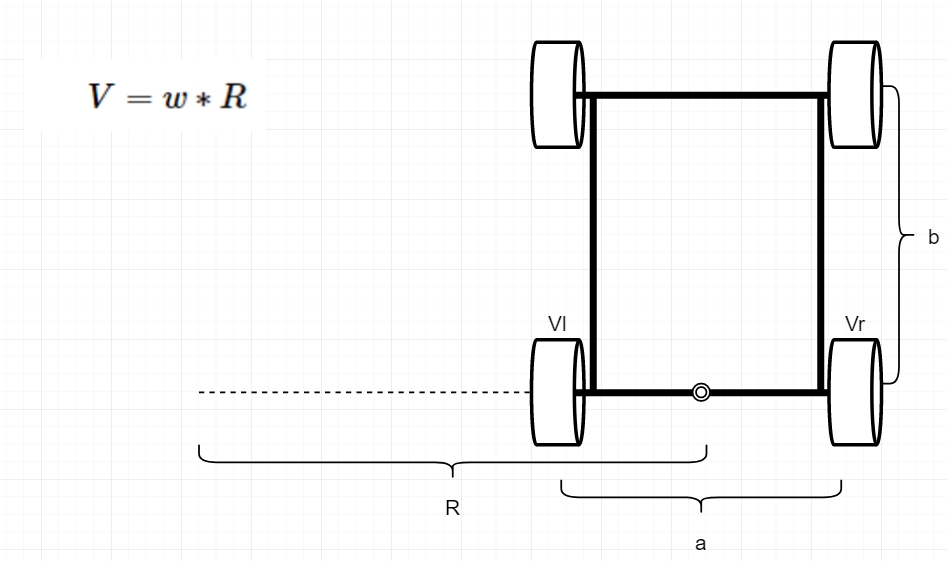
速度推导左右轮转速¶
已知线速度为V,角速度为:w 那么左右轮速度应该等于多少呢?
左右轮转速推导速度¶
已知左右轮的速度,我们推导当前小车前进的线速度和角速度
小车线速度公式:
v=(vr+vl)/2
小车角速度公式:
ω= (vr−vl)/2
推演的过程如下:

若有收获,就点个赞吧
0 人点赞
