任务描述:对图片上的五个小球进行识别以及建立坐标系进行测距
用到的知識
- 小孔成像
- 小球的42mm与17mm的比例区别
- 勾股定理計算距離
- 坐標轉換
- 霍夫線變換和霍夫圓變換
思路
1、通過百度搜索得出相機成像原理爲小孔成像
設物體實際長度爲X,相機焦距爲f,物體在圖片中長度爲P,物體到相機的距離爲D
得到公式:D=(f*X)/P
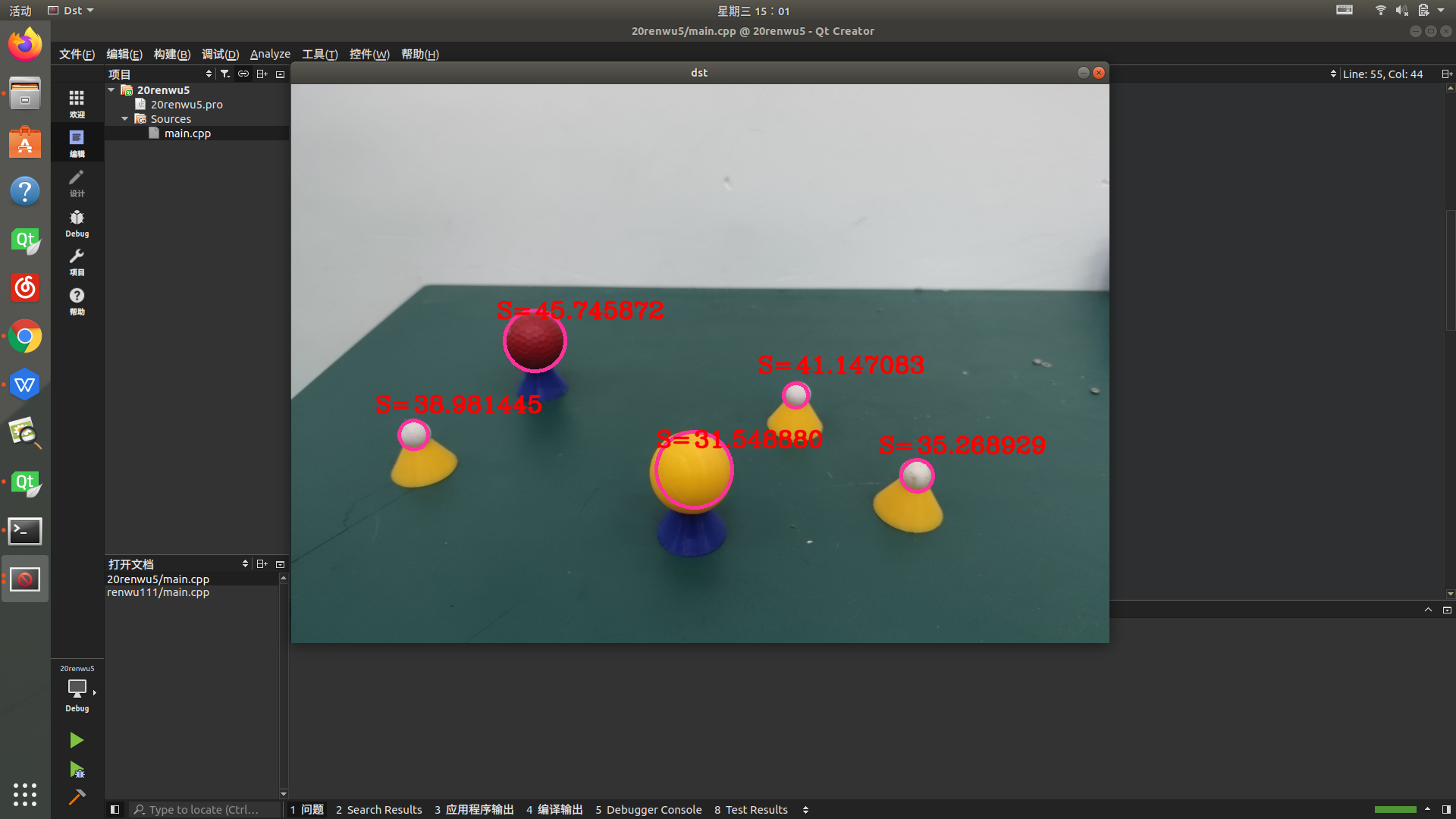
2、圖片在經過預處理後通過霍夫圓變換找出目標的5個小球。
3、代入數據到上面的公式中得到小球距相機的直線距離
4、根據勾股定理計算出小球距離相機的水平距離。
5、得出桌子長度作爲俯視圖的坐標軸y軸
6、通過霍夫線變換找到斜率最大得線作爲x軸
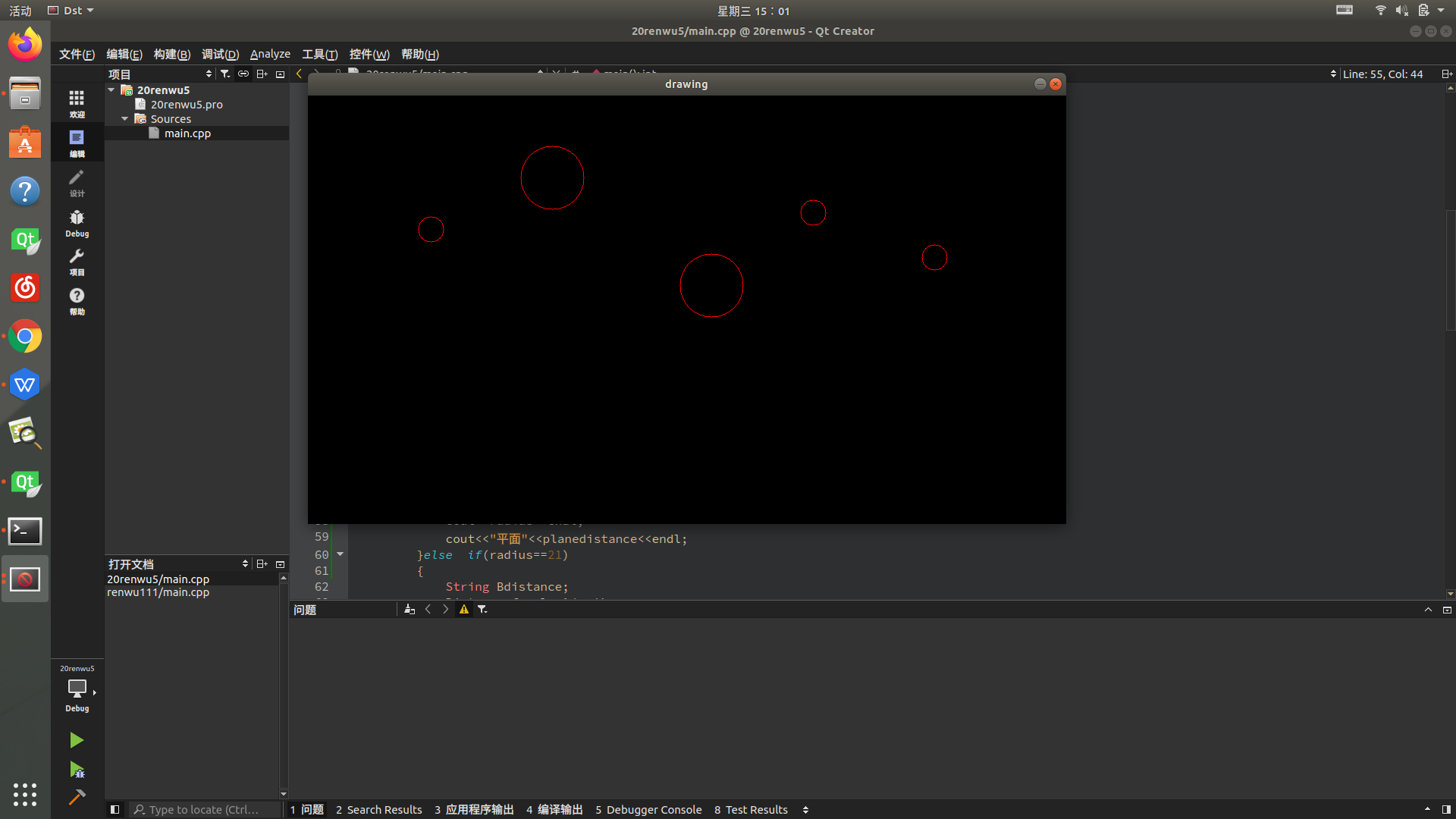
7、畫出俯視圖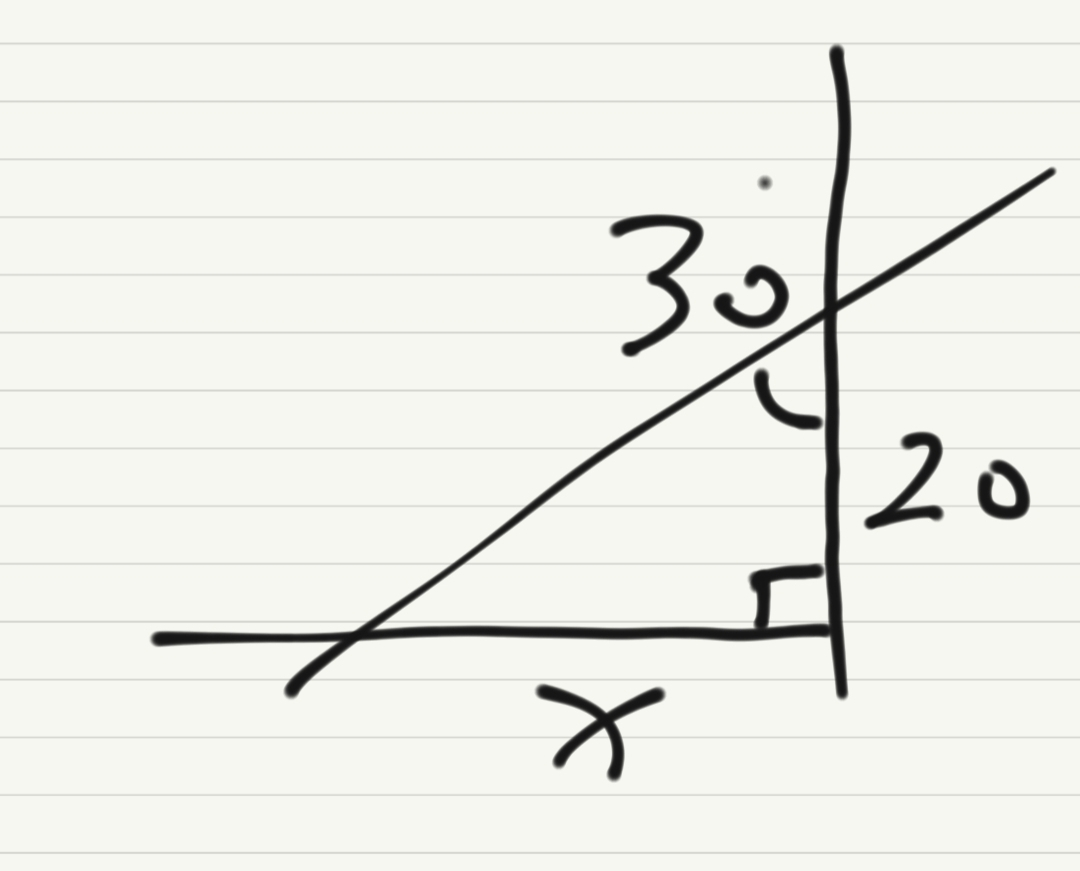
#include<iostream>#include<sstream>#include<math.h>#include<opencv2/opencv.hpp>#include<opencv2/imgproc/imgproc.hpp>#include<opencv2/highgui/highgui.hpp>using namespace std;using namespace cv;int main(){Mat srcImage,dstImage1,dstImage2,drawingImage;int x1=17,x2=42;float focal=435.675;float Distance,planedistance,Camhigh=20.0;float tabledistance,tablelong=100.0,Camdistance=60.0;tabledistance=sqrt(pow(Camdistance,2)-pow(Camhigh,2))*10;cout<<tabledistance<<endl;cout<<tablelong*10<<endl;int Coefficient=(int)(x2/x1);Point dis;Point s;vector<Vec3f>circles;vector<Vec2f>lines;drawingImage=Mat::zeros(Size(tablelong*10,tabledistance),CV_8UC3);srcImage=imread(/home/ma/下载/renwu52.jpg);cvtColor(srcImage,dstImage1,COLOR_BGR2GRAY);GaussianBlur(dstImage1,dstImage1,Size(5,5),3,3);Canny(dstImage1,dstImage2,3,9,3);HoughLines(dstImage2,lines,1,CV_PI/180,150,0,0);for(auto i=0;i<lines.size();i++){float k;k = (double)(lines[i][3] - lines[i][1]) / (double)(lines[i][2] - lines[i][0]);}HoughCircles(dstImage2,circles,HOUGH_GRADIENT,1,40,105,30,8,51);for(auto i=0;i<circles.size();i++){Point center(cvRound(circles[i][0]),cvRound(circles[i][1]));int radius=cvRound(circles[i][2]);dis.x=center.x;dis.y=center.y-30;s.x=center.x-50;s.y=center.y-30;if(radius!=18&&radius!=35){circle(srcImage,center,radius,Scalar(155,50,255),3,8,0);if(radius==19){Distance=focal*x1/radius;planedistance=sqrt(pow(Distance,2)-pow(Camhigh,2));String Adistance;Point Acenter;Acenter.x=center.x;Acenter.y=tabledistance-planedistance;Adistance=to_string(Distance/10);putText(srcImage,S=,s,FONT_HERSHEY_COMPLEX,1,Scalar(0,0,255),2,LINE_AA);putText(srcImage,Adistance,dis,FONT_HERSHEY_COMPLEX,1,Scalar(0,0,255),2,LINE_AA);circle(drawingImage,Acenter,17,Scalar(0,0,255),1,8,0);cout<<Adistance<<endl;cout<<Acenter<<endl;cout<<radius<<endl;cout<<平面<<planedistance<<endl;}else if(radius==21){String Bdistance;Distance=focal*x1/radius;planedistance=sqrt(pow(Distance,2)-pow(Camhigh,2));Point Bcenter;Bcenter.x=center.x;Bcenter.y=tabledistance-planedistance;Bdistance=to_string(Distance/10);putText(srcImage,S=,s,FONT_HERSHEY_COMPLEX,1,Scalar(0,0,255),2,LINE_AA);putText(srcImage,Bdistance,dis,FONT_HERSHEY_COMPLEX,1,Scalar(0,0,255),2,LINE_AA);circle(drawingImage,Bcenter,17,Scalar(0,0,255),1,8,0);cout<<Bdistance<<endl;cout<<平面<<planedistance<<endl;}else if(radius==40){Distance=focal*x2/radius;planedistance=sqrt(pow(Distance,2)-pow(Camhigh,2));String Cdistance;Point Ccenter;Ccenter.x=center.x;Ccenter.y=tabledistance-planedistance;Cdistance=to_string(Distance/10);putText(srcImage,S=,s,FONT_HERSHEY_COMPLEX,1,Scalar(0,0,255),2,LINE_AA);putText(srcImage,Cdistance,dis,FONT_HERSHEY_COMPLEX,1,Scalar(0,0,255),2,LINE_AA);circle(drawingImage,Ccenter,42,Scalar(0,0,255),1,8,0);cout<<Cdistance<<endl;cout<<平面<<planedistance<<endl;}else if(radius==16){Distance=focal*x1/(radius+Coefficient);planedistance=sqrt(pow(Distance,2)-pow(Camhigh,2));String Ddistance;Point Dcenter;Dcenter.x=center.x;Dcenter.y=tabledistance-planedistance;Ddistance=to_string(Distance/10);putText(srcImage,S=,s,FONT_HERSHEY_COMPLEX,1,Scalar(0,0,255),2,LINE_AA);putText(srcImage,Ddistance,dis,FONT_HERSHEY_COMPLEX,1,Scalar(0,0,255),2,LINE_AA);circle(drawingImage,Dcenter,17,Scalar(0,0,255),1,8,0);cout<<Ddistance<<endl;cout<<平面<<planedistance<<endl;}else if(radius==50){Distance=focal*x2/(radius+Coefficient*4);planedistance=sqrt(pow(Distance,2)-pow(Camhigh,2));Point Ecenter;Ecenter.x=center.x;Ecenter.y=tabledistance-planedistance;String Edistance;Edistance=to_string(Distance/10);putText(srcImage,S=,s,FONT_HERSHEY_COMPLEX,1,Scalar(0,0,255),2,LINE_AA);putText(srcImage,Edistance,dis,FONT_HERSHEY_COMPLEX,1,Scalar(0,0,255),2,LINE_AA);circle(drawingImage,Ecenter,42,Scalar(0,0,255),1,8,0);cout<<Edistance<<endl;cout<<平面<<planedistance<<endl;}}}imshow(dst,srcImage);imshow(drawing,drawingImage);waitKey(0);return 0;}

若有收获,就点个赞吧
0 人点赞
