————————
2020/2/1-2020/2/8
学习计划:
一、完成《halcon》学习任务(2/1)
工作计划:
一、完成机器人视觉开发指导书第一篇目录总结和工程打包,争取5号前整理完毕(2/3)
二、完成第二篇目录总结和工程打包(2/3)
**
工作总结:
————————
2020/1/25-2020/2/1
学习计划:
一、假期抽空看书,学完《halcon机器视觉算法原理与编程实战》(1/29)
二、抽空刷视频课学习c#(1/29)
工作计划:
一、继续完善教材大纲(1/29)
**
工作总结:
————————
2020/1/18-2020/1/25
学习计划:
一、推进C#两百例,记录代码,完成学习(1/18)
二、学习《halcon机器视觉算法原理与编程实战》(1/18)
三、运用“京东读书校园版充实自己”(1/18)
四、学习飞浆,了解tensorflow和pytoeh(1/19)
工作计划:
一、 总结《机器人视觉开发指导书》第二篇,添加注释,绘制时间流程图,总结编程过程与困难(1/18)
二、寻找志同道合合伙人(1/19)
**
工作总结:
————————
2020/1/11-2020/1/18
学习计划:
一、完成《机器人视觉开发指导书》第二篇,上传教材(1/11)
二、运用unity实现五子棋和魔方(1/11)
三、推进c#两百例,记录代码,完成学习(1/11)
工作计划:
一、协助完成象棋工站(1/11)
二、学习机械手的组装与控制(1/15)
三、学习3D打印机的使用(1/15)
四、学习机器人小车(1/16)
五、完成机械臂串口通讯(1/18)
**
工作总结:
halcon总结:(1/14)
一、“当前上下文中不能存在XX”时可以自动生成字段,或者按照方法需求自己来定义。
二、“未将对象引用设置到对象的实例”要么死因为没有初始化,或者变量为null。
三、心态平稳,出问题先检查代码,有可能简单的大小写才是问题罪魁祸首,此次任务一问题源自于colorspace打错成了colorSpace
四、halcon在摄像画面上画图还需要加上dev_get_window (WindowHandle)这一行代码
五、不能确定变量类型的错误可以通过添加变量来解决,比如在get_image_size的括号里加入Width
另一种可能
需要在变量外加单引号
六、tips,在任务二画完矩形以后要单机鼠标右键才能进行下一步
机械手总结:(1/15)
一、如何分辨A、B和正负并不重要,只需要用万用表测得两两对应即可,加入实验过程中发现运行方向相反(比如传送带运行方向相反),可以断电后交换正负位置,实现功能。
二、启动机械臂之前需要手动调零,按照机械臂上箭头方向校准。
三、视觉控制系统三点标定确定的分别是物块的xy位置和机械臂的xy位置,物块的位置再视觉控制系统左下角能找到,机械臂的xy位置在机器人控制系统的当前坐标能找到
四、附两张接线图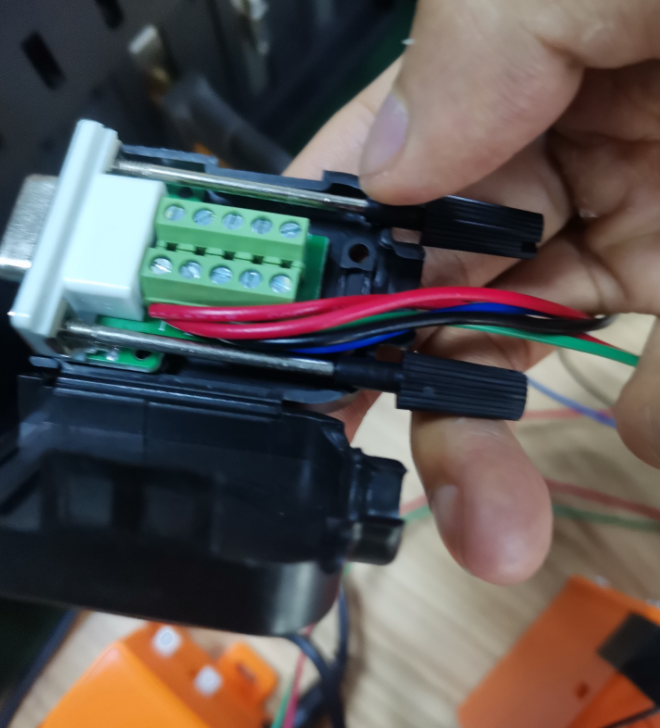 1号点是公共端,接两根红线,2、3、4分别对应程序中的0、1、2三个端口,分别是送料,抽吸和传送带
1号点是公共端,接两根红线,2、3、4分别对应程序中的0、1、2三个端口,分别是送料,抽吸和传送带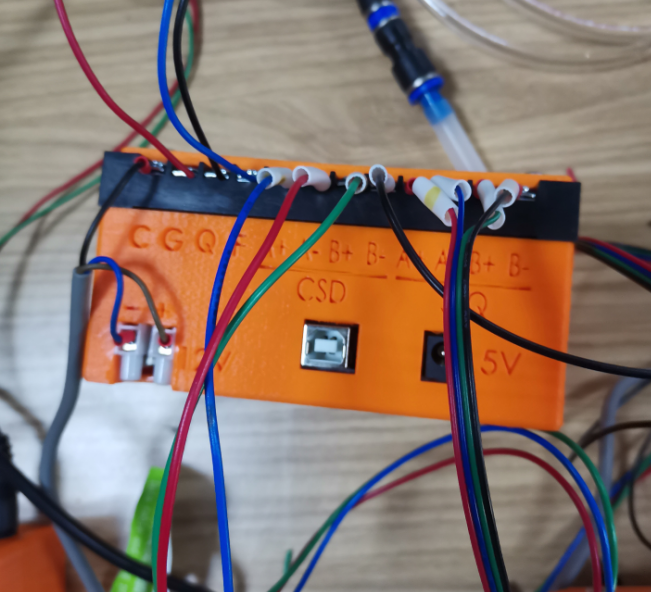 相机线灰线接正,蓝线接负,黑线信号线接C,QF分别接送料端和传送带端,CSD接传送带四个接口(只需要用万用表测过两两对应即可),SLQ接送料器四个接口(同传送带)
相机线灰线接正,蓝线接负,黑线信号线接C,QF分别接送料端和传送带端,CSD接传送带四个接口(只需要用万用表测过两两对应即可),SLQ接送料器四个接口(同传送带)
3D打印机(1/15)
先预热,再打印;换线前也需要加热才能换线;开始打印时要注意,线有可能绷断;打印零件序号与手册序号一一对应;
c#窗体:(1/16)
一、多点标定中,像素XY坐标和机器人XY坐标都需要准备至少三位的数组,且需要一一对应。
二、模块匹配很傻,如果一开始绘制的形状有问题,就会识别不出物件,所以要控制环境,且最好挑选好识别的模块进行识别。
三、tips,查代码光看有没有打错还不够,设置断点以后可以鼠标移动到关键词上面,会显示他的值,追本溯源即可知道问题出在什么地方。
C#窗体:(1/17)
一、完成任务书第二篇所有任务,不要贪快,先理解,再写代码;
二、HTuple本身就能当成数组来用,例如
…….
HTuple hv_X= new HTuple();
hv_X[0] = 1;
hv_X[2] = 5;
…….
三、时刻注意定义的值是什么,任务书第二篇任务三中转换坐标的控件代码有错误,应把string改成double
四、Htuple强制转换的方法如下
……
public HTuple QXX;
QXX[0].S
……
————————
2020/1/4-2020/1/11
学习计划:
一、完成“连连看”,“俄罗斯方块”,“五子棋”三项任务的vs设计和unity设计。(1/4)
二、完成《机器人视觉开发指导书》第二篇五项任务。(1/4)
三、独立完成五子棋vs版和unity版设计,上传教材(1/8)
工作计划:
一、将“连连看”,“俄罗斯方块”,“五子棋”两种版本加入教材,设计流程。(1/4)
二、将《机器人视觉开发指导书》第一篇具体流程发至教材。(1/4)
三、完善《机器人视觉开发指导书》第二篇教程。(1/4)
**
工作总结:
继续调试“连连看”(1/4)
完成vs“连连看”调试,实现功能;上传vs连连看教材;写好unity“连连看”脚本;(1/5)
连连看方块无法复制(1/6)
连连看方块无法显示;连连看方块只显示第一行;连连看方块第一行最后一个未复制;(1/7)
完成unity“连连看”调试,实现功能;上传unity教材;解决俄罗斯方块无法调速的问题;完成vs“俄罗斯方块”调试,实现功能;上传vs教材;(1/8)
俄罗斯方块unity版,需要注意perfab数值设计;五子棋棋盘绘制和放置棋子二连吃瘪,盲猜需要运用picture box自带的画线功能和画图功能,graphic和draw,明日确认关键字并尝试学会如何使用(1/9)
运用picture box绘制五子棋棋盘需要用到图层技术,最后选择了panel实现绘制棋盘;棋盘大小目前并不能控制,需要解决,但不关键;尽可能多使用循环可以大量减少代码行数;(1/10)
学会怎么在vs引用halcon,以及怎么启动摄像头;学会vs怎样左右上下对齐;(1/11)
————————
2019/12/28-2020/1/4
学习计划:
一、完成《机器人视觉开发指导书》第一篇八项任务。(12/28)
二、完成《机器人视觉开发指导书》第二篇五项任务。(12/28)
三、学习“连连看”、“俄罗斯方块”(1/1)
工作计划:
一、将《机器人视觉开发指导书》改写成教材(12/31)
二、将“连连看”、“俄罗斯方块”、“推箱子”改写成教材,加入《机器人视觉开发指导书》中(1/1)
**
工作总结:
完成第一篇任务一,了解readline使用方法;完成第一篇任务二除课后作业以外其他部分,了解窗口的基本运用,编程中产生了一个问题——为什么按钮相关的值只能写在按钮里面(尝试过写在代码最前面却不停报错,写在后面就能运行了),明天查资料试着解决一下。(12/28)
疯狂吃瘪。(12/29)
完成第一篇任务二课后作业,了解窗体的特殊之处,解决了问题;完成第一篇任务三;完成第一篇任务四;完成第一篇任务五;完成第一篇任务六。(12/30)
完成第一篇任务七,发先程序会卡死循环;完成第一篇任务八,但是解决不了从一个窗口打开另一个窗口的问题。(12/31)
完善第一篇任务七代码;解决任务八问题,添加qq窗口;(1/1)
上传梳理好的教材(1/2)
完成部分连连看设计,未实现鼠标功能,未检查代码确认游戏逻辑是否有误(1/3)
实现连连看鼠标功能,未实现上下边界连接问题,未实现延时功能(1/4)

若有收获,就点个赞吧
0 人点赞
