————————
————————
2020/2/8
完成事项:
一、学习相机标定和三维重建,与过去编程实践结合起来学习
二、填充完第一篇第一章框架,添加一个小工程包
三、重写第二篇工程包部分框架
问题总结:
一、c#Halcon联合编译工程包不知道为什么在复制过后副本无法实现功能(考虑重写一遍
明日安排:
一、继续细化第一篇第一章
二、将要学到的C#特性按照剩下六节进行分类,放入各个章节之中
三、完成第二篇视觉工程包模块
四、继续学习
————————
2020/2/7
完成事项:
一、整理完成第二篇教材目录及工程包
二、学习特征分类和光学符号识别算子
三、填充部分第一篇第一章内容
问题总结:
明日安排:
一、按照第一篇大纲顺序填充内容,完成教材草稿的初步编写工作
————————
2020/2/6
完成事项:
一、学习图像分类流程,分类器和算子
二、整理第二篇教材目录
问题总结:
明日安排:
一、学习《halcon》
二、熟悉halcon助手进行模板匹配
————————
2020/2/5
完成事项:
一、学习了halcon模板匹配常用算子
二、整理了第一篇教材工程文件,找到了第二篇教材工程文件
问题总结:
明日安排:
一、完成第二篇教材目录,打包第二篇教材
二、学习《halcon》
三、往第一章填充内容
————————
2020/2/4
完成事项:
一、搞懂了灰度共生矩阵的计算方法和在特征提取中的应用
二、按学习顺序整理好了第一篇教材目录
问题总结:
明日安排:
一、打包第一篇教材目录及工程包
————————
2020/2/3
完成事项:
一、学习了图像特征提取相关算子
问题总结:
明日安排:
一、确认所有第一篇工程包并打包
二、按时间顺序整理第一篇教材目录
三、加速学完《halcon》
————————
2020/2/2
完成事项:
一学习了图形形态处理的各类算子(腐蚀、膨胀、开/闭运算、顶/低帽运算),也了解了具体实例
问题总结:
明日安排:
————————
2020/2/1
完成事项:
一、了解颜色空间和颜色通道的各类常用算子
问题总结:
明日安排:
————————
2020/1/31
完成事项:
一、学习halcon几种图像处理方法和相应算子(阈值分割法,区域生长法,分水岭法)
问题总结:
明日安排:
————————
2020/1/30
完成事项:
一、学习《halcon》,了解了图片降噪滤波的办法
问题总结:
明日安排:
继续学习
————————
2020/1/29
松弛这么久有些不应该…
完成事项:
一、在b站学习c#视频课
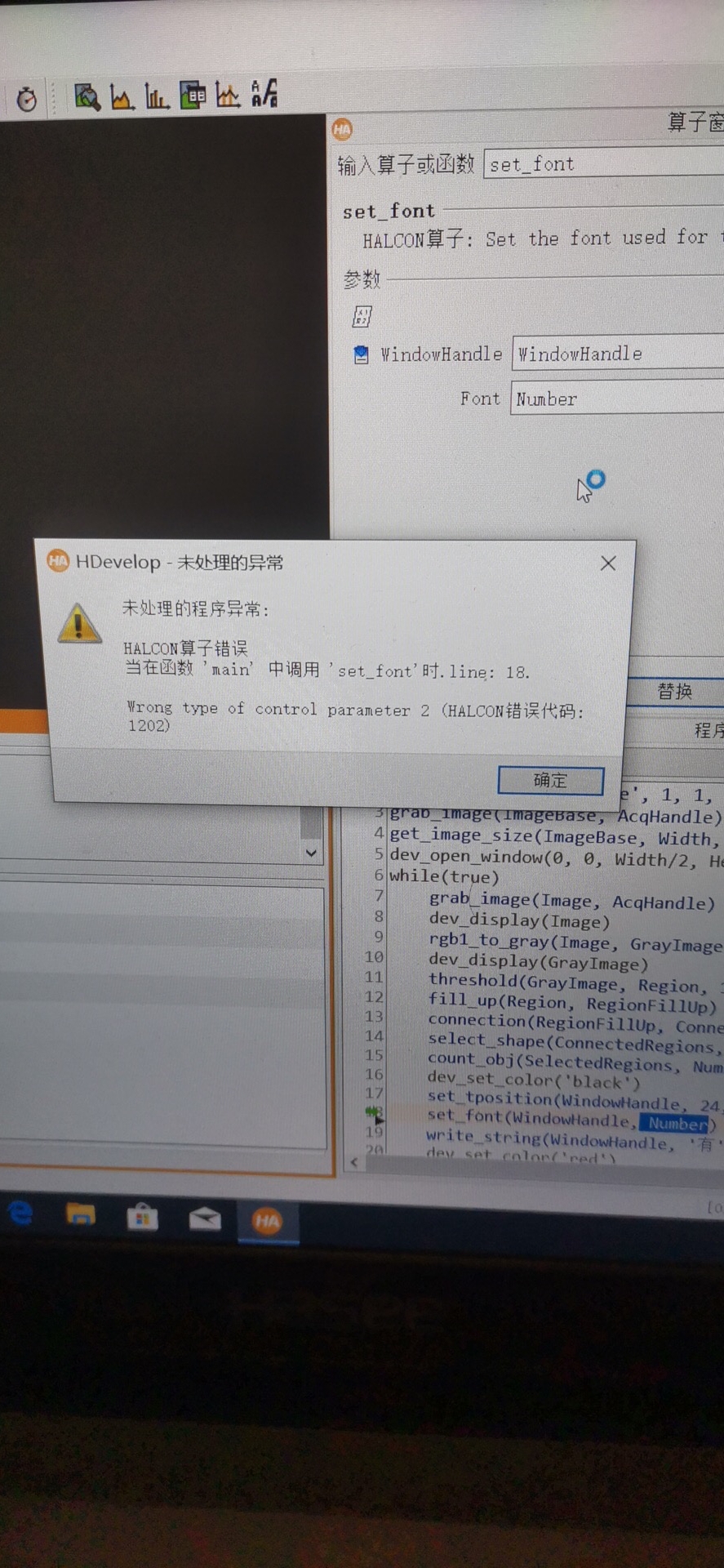
二、读完《halcon》第一篇章
问题总结:
一、《halcon》第一篇的例子未能实现,记录下来,回公司问司徒
明日安排:
一、继续学习
二、有大块时间的话,整理教材大纲
————————
2020/1/21
完成事项:
一、接续教材大纲整理
问题总结:
明日安排:
一、继续整理教材工作
————————
2020/1/20
完成事项:
一、完成部分教材整理工作
问题总结:
明日安排:
一、推进教材大纲整理
————————
2020/1/19
完成事项:
一、添加部分程序注释
二、完成部分教材梳理工作
问题总结:整理
一、还需要好好安排自己的学习休息时间分配
二、未下载安装飞浆
三、未推进C#200例
明日安排:
一、继续给控制机械臂的C#程序写注释
二、总结梳理教材
————————
2020/1/18
完成事项:
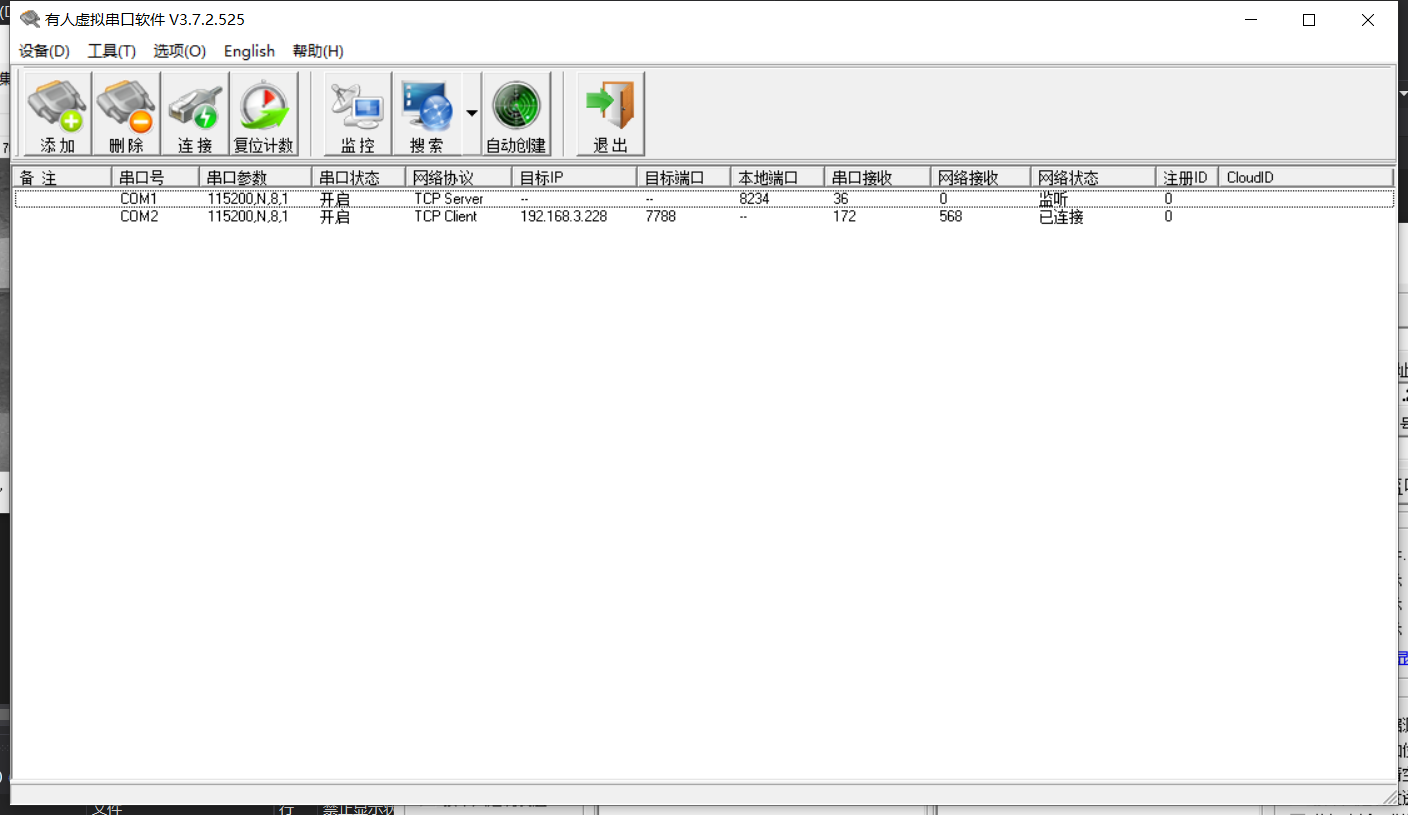
一、实现串口通讯功能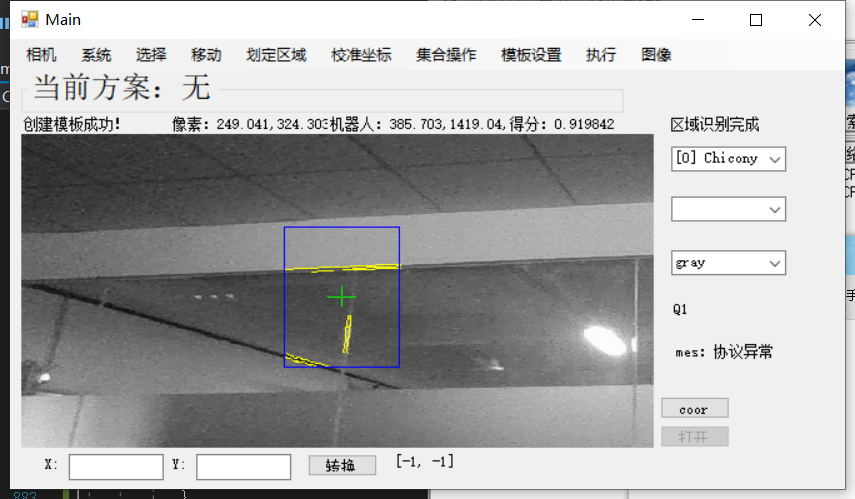
问题总结:
一、当电脑没有串口的时候需要使用虚拟串口验证功能,要注意Server和Client的不同
二、不影响功能实现的报错好像不要紧(?
三、未推进C#两百例
明日安排:
一、继续给控制机械臂的C#程序写注释
二、尝试重新将过去的任务写一遍,空余时间尝试独立完成控制机械臂的C#程序
————————
2020/1/17
完成事项:
一、运用c#实现多点标定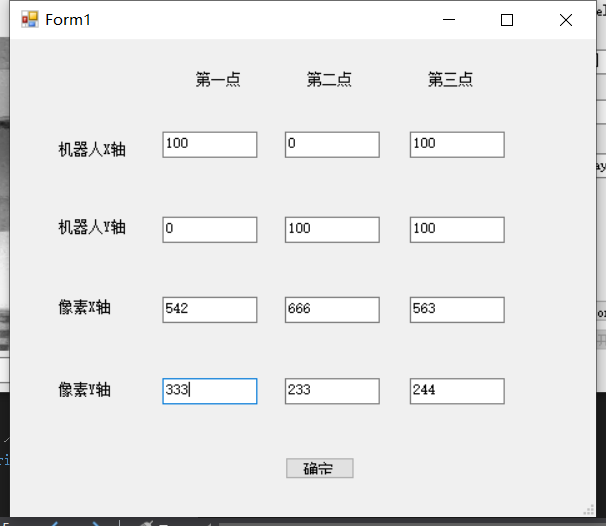

![8_0(9`EO@`VZ7KB3`]Y~__B.png](/uploads/projects/afdalzheshi@ncw28b/e2978ac699698b0db3d68aa650782117.png)
二、方案保存模块模板保存功能实现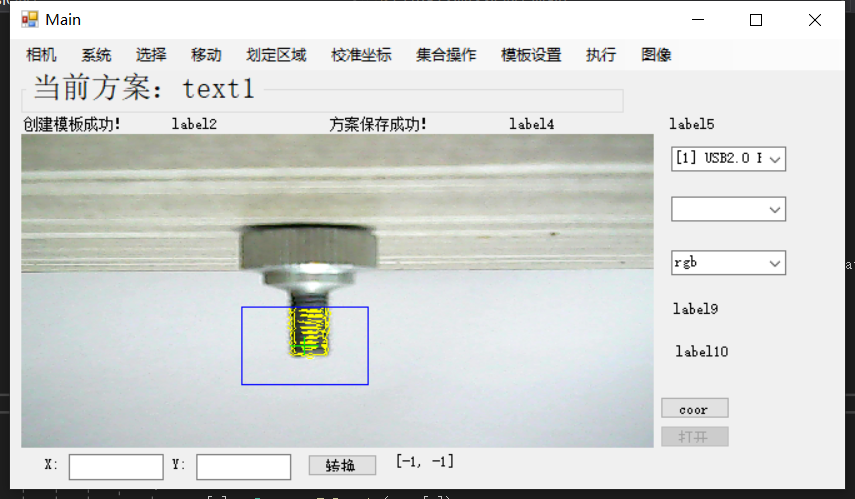
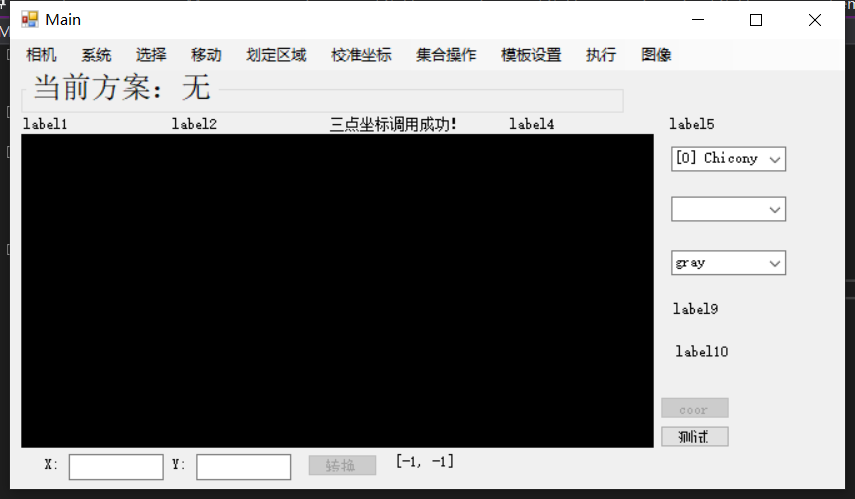
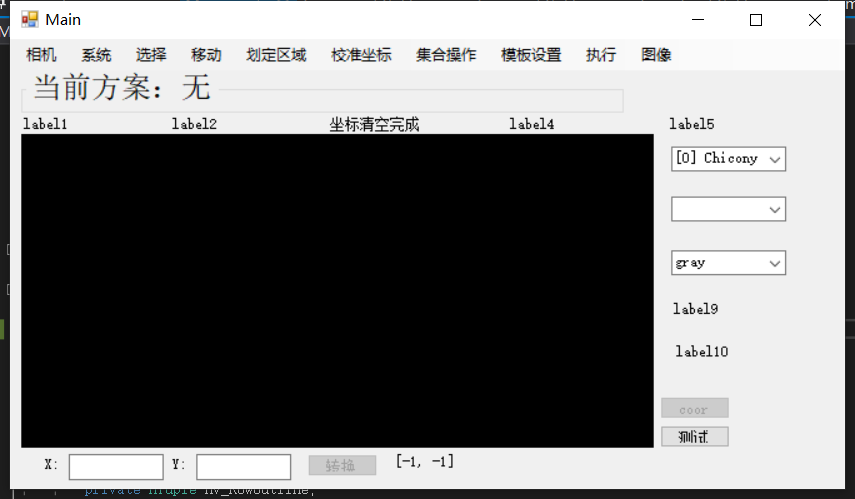
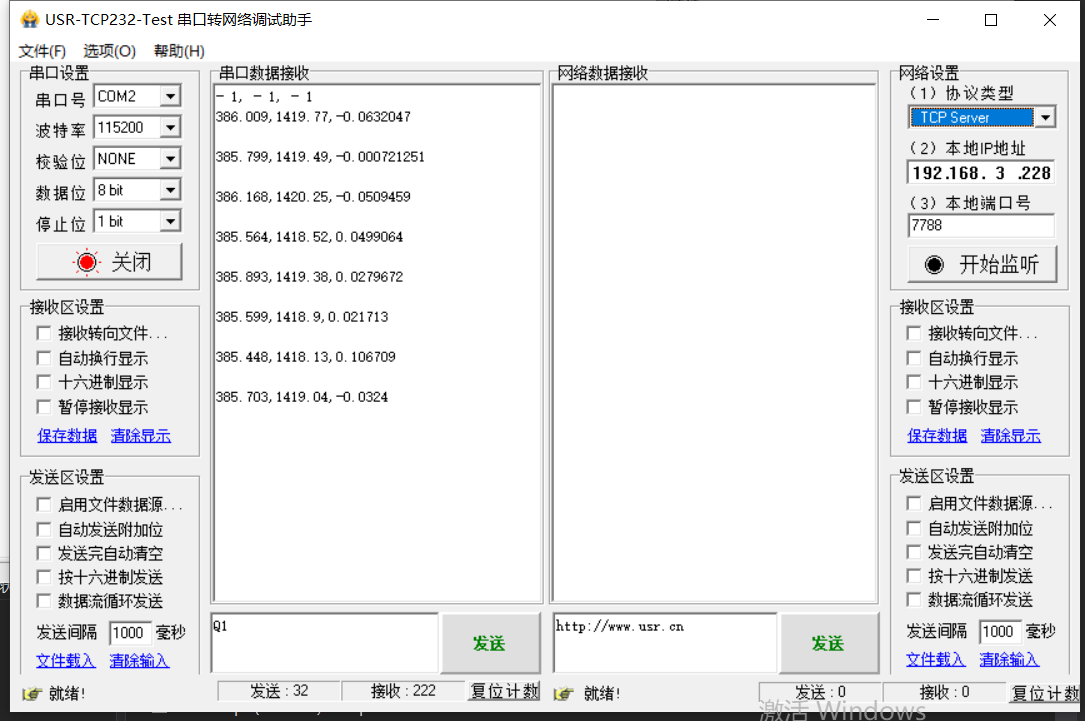
四、服务器模块功能实现(前几行是调试失败,最后发送的机械臂坐标是正确的)
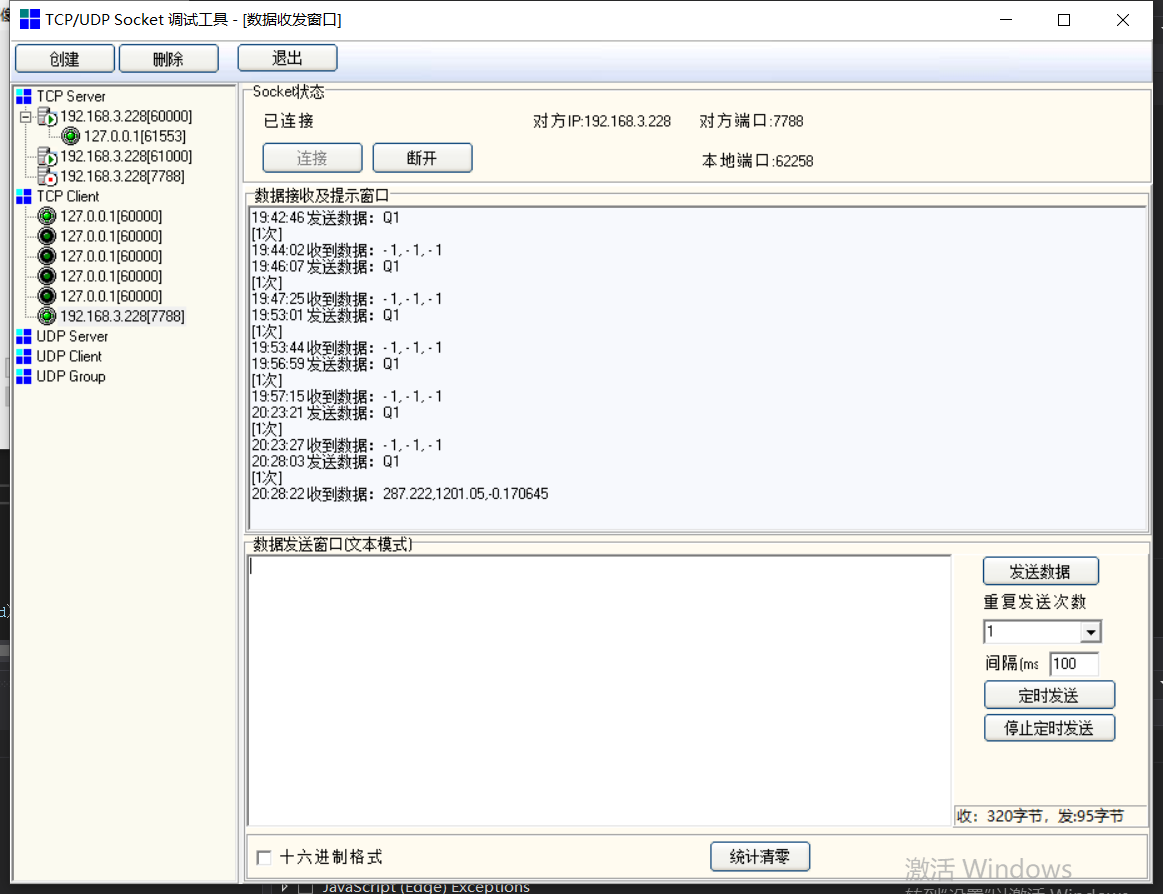
五、两百例完成进度(2/200)
六、了解了Socket tool怎么用
问题总结:
一、HTuple本身就能当成数组来用,例如
…….
HTuple hv_X= new HTuple();
hv_X[0] = 1;
hv_X[2] = 5;
…….
二、时刻注意定义的值是什么,任务书第二篇任务三中转换坐标的控件代码有错误,应把string改成double
三、Htuple强制转换的方法如下
……
public HTuple QXX;
QXX[0].S
……
明日安排:
一、完成服务器模块的调试工作
二、用自己写的程序操作机械臂
三、给该C#程序添上注释0.0
————————
2020/1/16
完成事项:
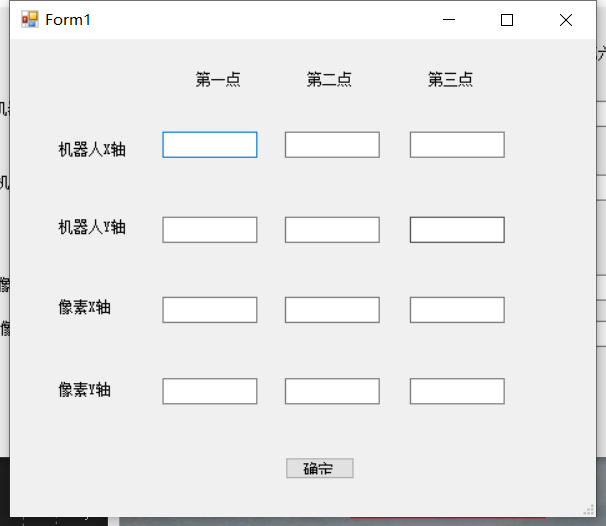
一、任务三模板标定模块既是机械臂实验中的三点(四点/九点)标定,halcon主要承担模板标定坐标转换工作,halcon自带坐标仿射转换算子,学习如何调用。以下运用halcon进行三点标定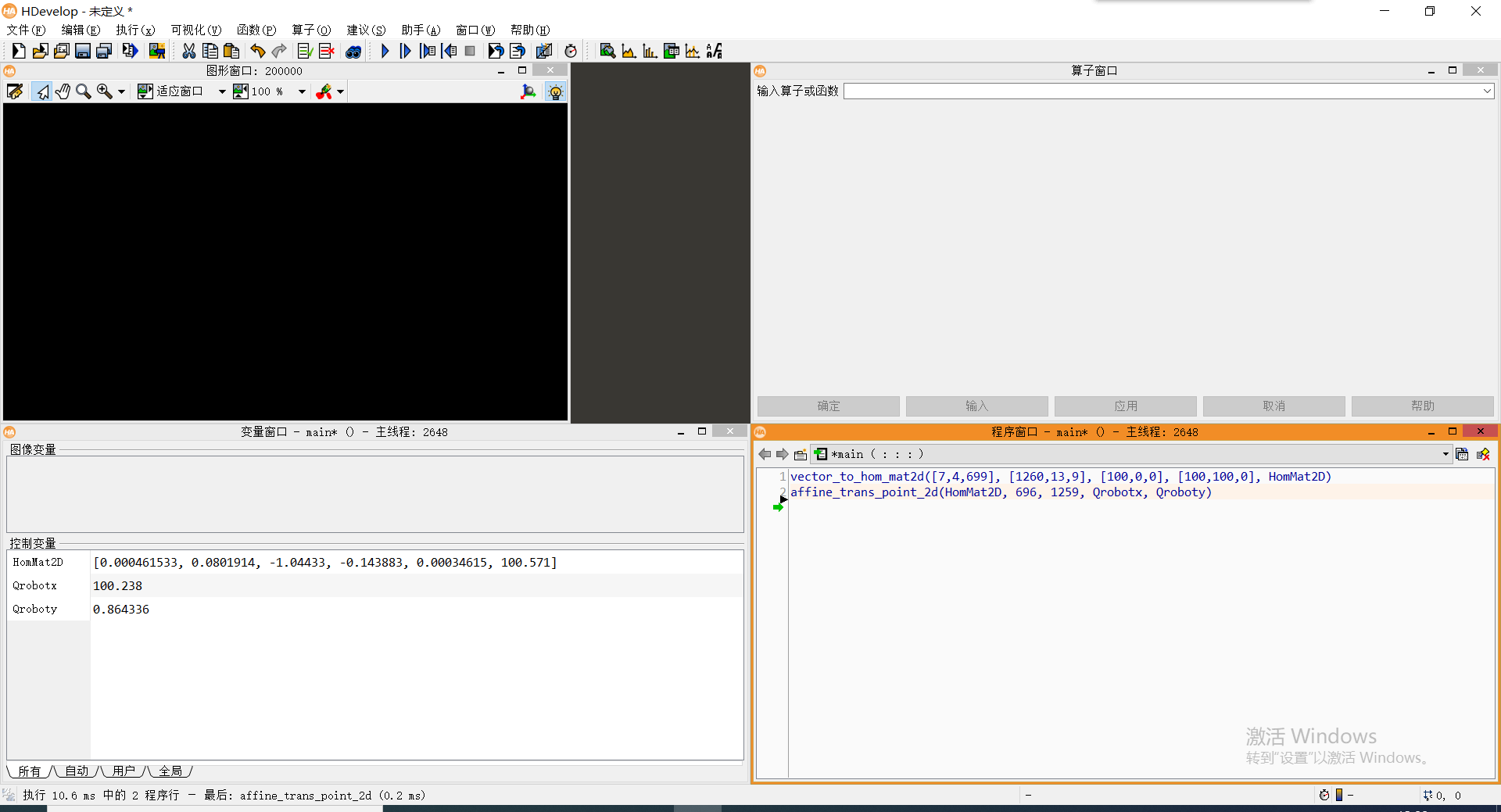
完成了多点标定的窗体![OF3~~PP5@_N2T76$F`[$]2W.png](/uploads/projects/afdalzheshi@ncw28b/9262c3e87f3a699de30b84e2b289f32f.png)
二、实现主窗体打开摄像头,拍照,画矩形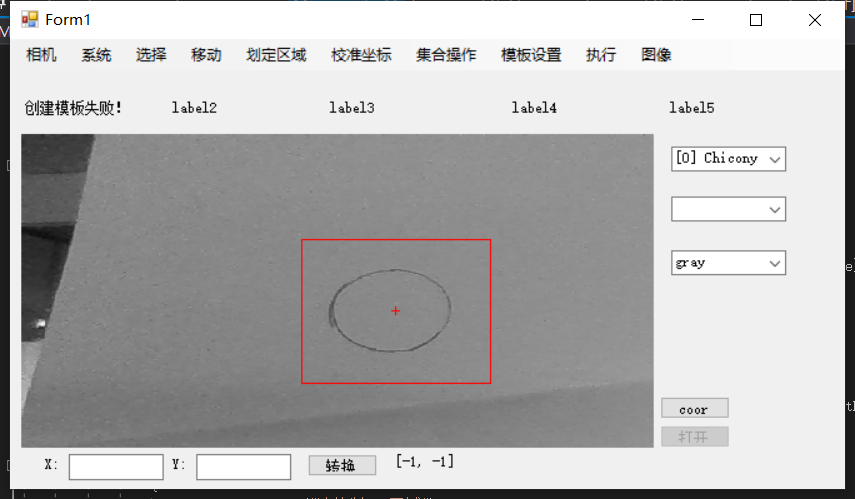
![9S}16KQ]9@QJ2ZR9$4SL3(C.png](/uploads/projects/afdalzheshi@ncw28b/08e3c8fcb9da032286ac760d602cba3e.png)

四、两百例完成进度(1/200)
问题总结:
一、多点标定中,像素XY坐标和机器人XY坐标都需要准备至少三位的数组,且需要一一对应。
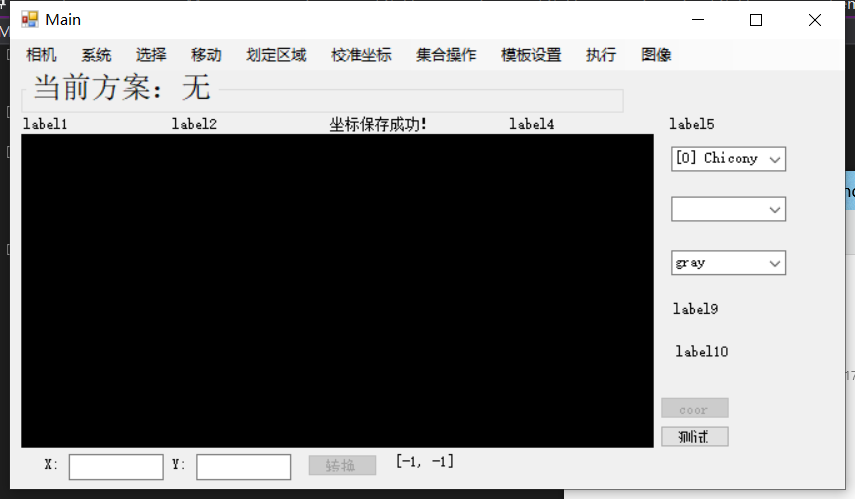
二、模块匹配很傻,如果一开始绘制的形状有问题,就会识别不出物件如下

三、tips,查代码光看有没有打错还不够,设置断点以后可以鼠标移动到关键词上面,会显示是否为空
明日安排:
一、继续调试c#窗体,实现三点坐标定位转换功能
二、推进服务器模块进展
————————
2020/1/15
完成事项:
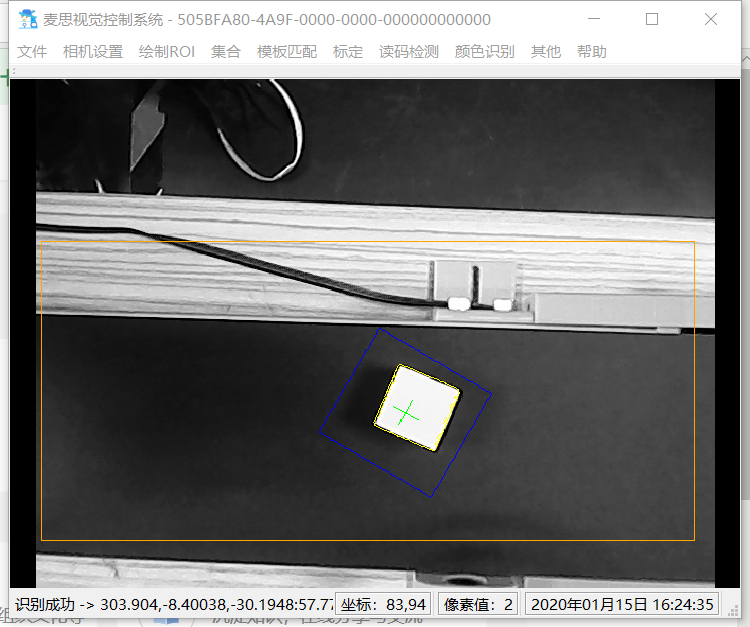
一、完成机械臂实验,以下为麦思机器人控制系统以及视觉模块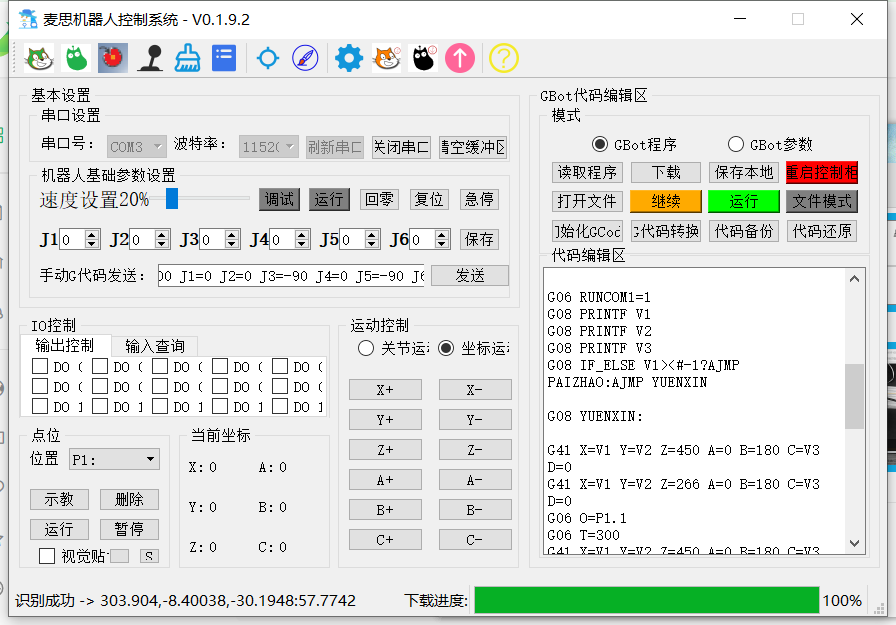
运用机械臂实现抓取放下功能,控制送料器送料放料,控制传送带传动停止
二、
问题总结:
一、如何分辨A、B和正负并不重要,只需要用万用表测得两两对应即可,加入实验过程中发现运行方向相反(比如传送带运行方向相反),可以断电后交换正负位置,实现功能。
二、启动机械臂之前需要手动调零,按照机械臂上箭头方向校准。
三、视觉控制系统三点标定确定的分别是物块的xy位置和机械臂的xy位置,物块的位置再视觉控制系统左下角能找到,机械臂的xy位置在机器人控制系统的当前坐标能找到
四、附两张接线图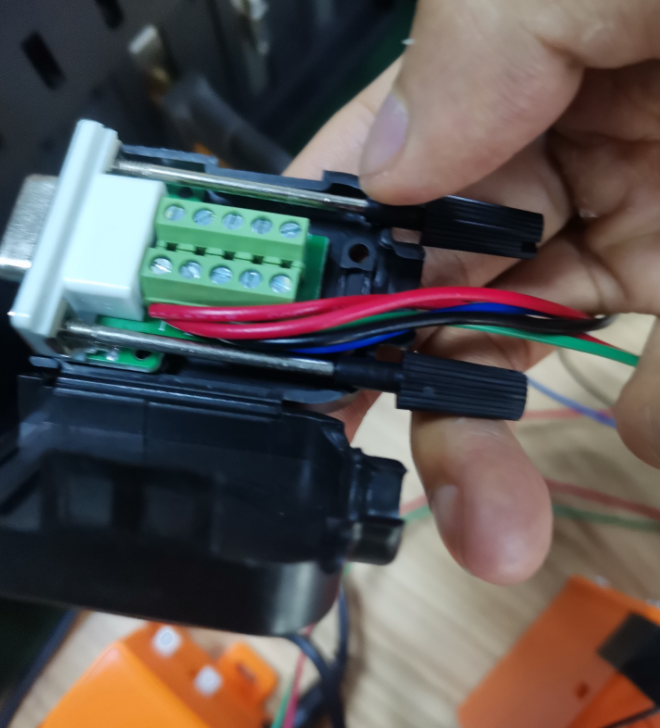 1号点是公共端,接两根红线,2、3、4分别对应程序中的0、1、2三个端口,分别是送料,抽吸和传送带
1号点是公共端,接两根红线,2、3、4分别对应程序中的0、1、2三个端口,分别是送料,抽吸和传送带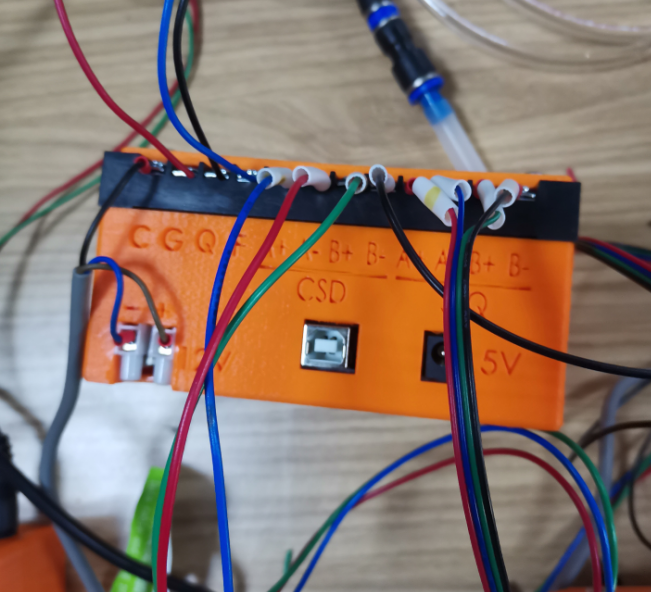 相机线灰线接正,蓝线接负,黑线信号线接C,QF分别接送料端和传送带端,CSD接传送带四个接口(只需要用万用表测过两两对应即可),SLQ接送料器四个接口(同传送带)
相机线灰线接正,蓝线接负,黑线信号线接C,QF分别接送料端和传送带端,CSD接传送带四个接口(只需要用万用表测过两两对应即可),SLQ接送料器四个接口(同传送带)
五、形状匹配模块缺少两个方法函数
明日安排:
推进形状匹配模块和模板标定模块,学习《halcon机器视觉算法原理与编程实战》
————————
2020/1/14
完成事项:
一、实现任务一图像采集模块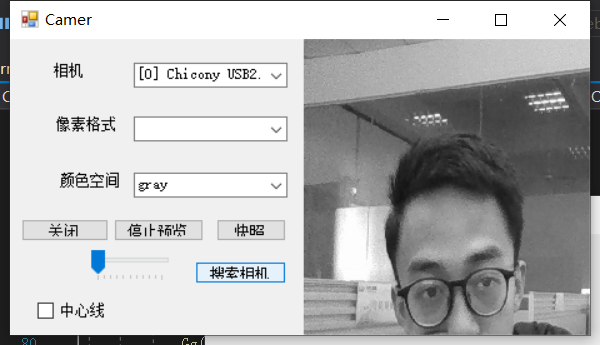
二、实现任务二形状匹配模块的halcon部分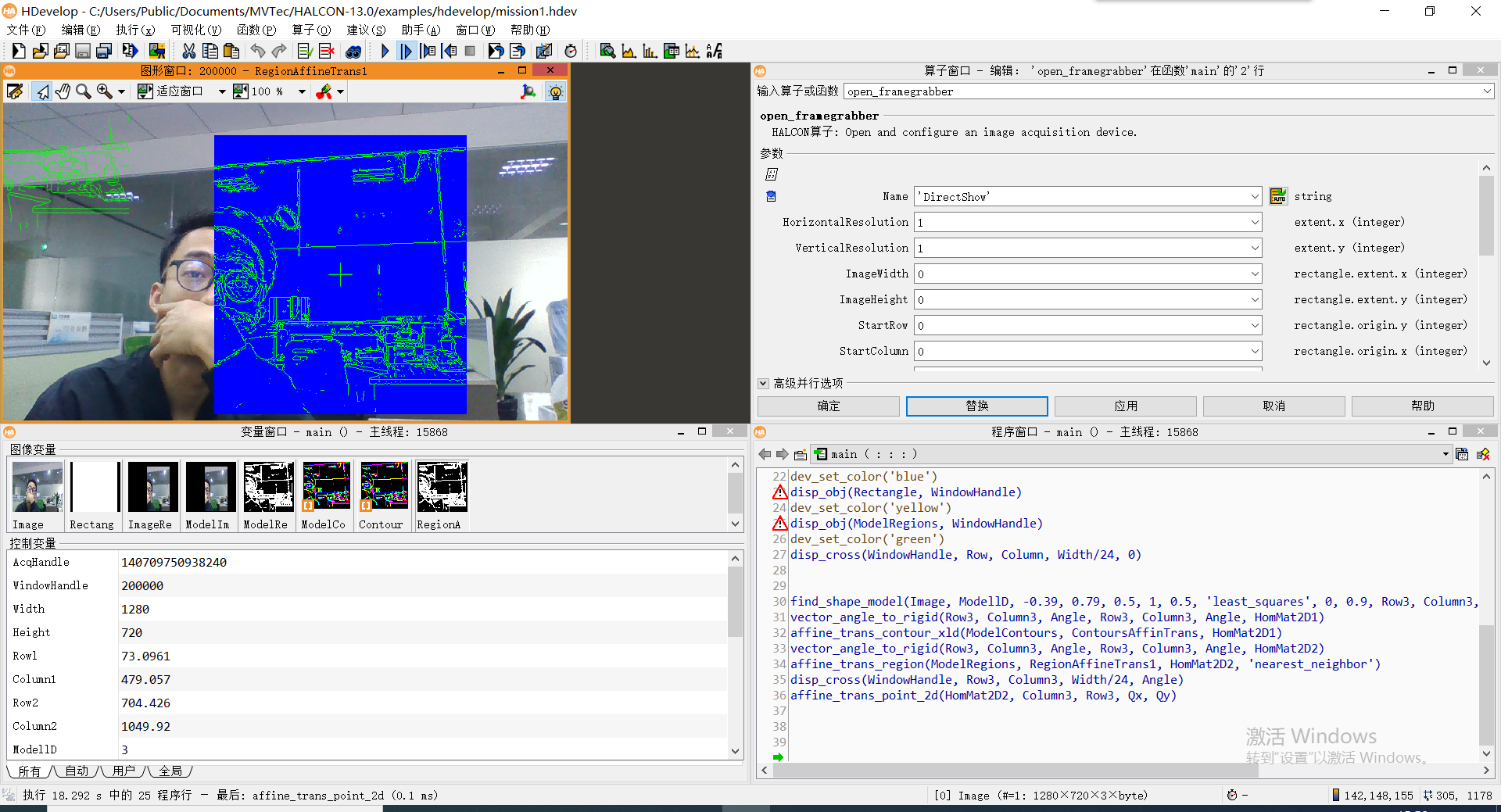
问题总结:
一、“当前上下文中不能存在XX”时可以自动生成字段,或者按照方法需求自己来定义。
二、“未将对象引用设置到对象的实例”要么死因为没有初始化,或者变量为null。
三、心态平稳,出问题先检查代码,有可能简单的大小写才是问题罪魁祸首,此次任务一问题源自于colorspace打错成了colorSpace
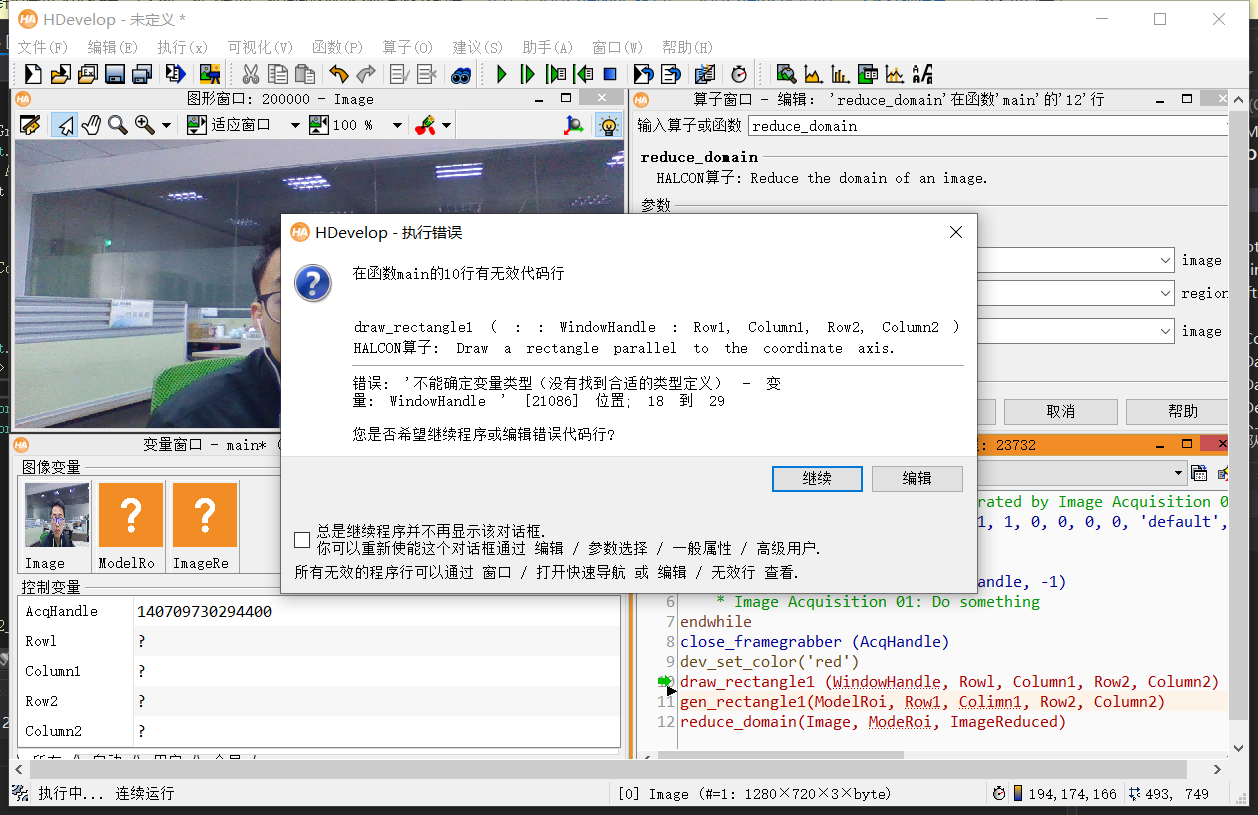
四、halcon在摄像画面上画图还需要加上dev_get_window (WindowHandle)这一行代码
五、根据图形窗口名称不同也可以修改代码 此时可以用200000代表图形窗口如下图所示
此时可以用200000代表图形窗口如下图所示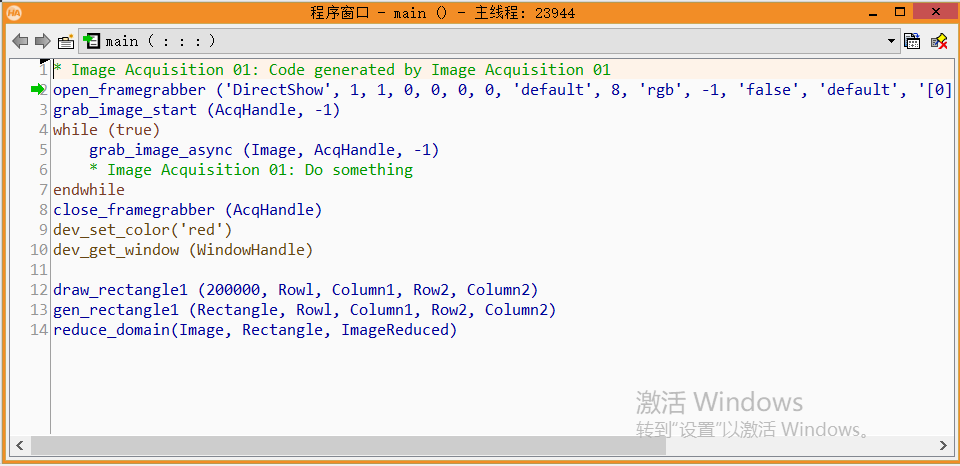
六、不能确定变量类型的错误可以通过添加变量来解决,比如在get_image_size的括号里加入Width
另一种可能
需要在变量外加单引号
七、tips,在任务二画完矩形以后要单机鼠标右键才能进行下一步
明日安排:
继续完成任务二
————————
2020/1/13
折戟事项:
一、任务一在调整初始化以后依旧存在一些问题
明日安排:
一、学习“菜鸟编程”课程
二、查c#错误列表,解决任务一中的错误
三、查halcon教程,完成任务二
————————
2020/1/12
完成事项:
一、解决halcon摄像头打不开的问题
二、完成一部分unity五子棋的资源下载与脚本编写
折戟事项:
暂无
明日安排:
一、怼halcon
————————
2020/1/11
完成事项:
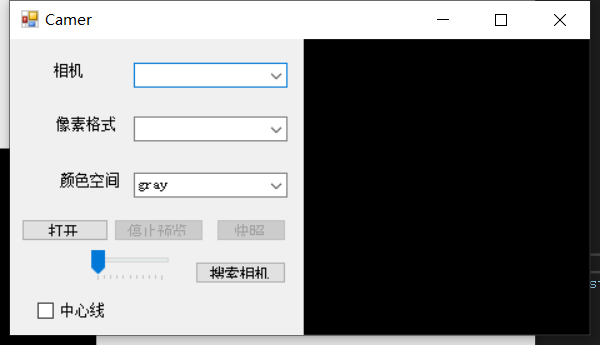
一、成功启动halcon并启动摄像头
折戟事项:
一、未解决c#无法调用相机的问题![U`2Q@2@Y(493S46M]4R`}BL.png](/uploads/projects/afdalzheshi@ncw28b/f6cfaa4a7dd4cbfeec2e350aab76ab67.png)

三、上传五子棋vs版教材
折戟事项:
一、未完成设计五子棋unity版
二、目前五子棋棋盘大小无法控制
明日安排:
一、学习《机器人视觉开发指导书》第二篇任务一
————————
2020/1/9周四
完成事项:
一、俄罗斯方块unity版设计完成,解决方块往上走的问题,上传教材。
二、完善所有已有教材实例截图,将教材分为vs和unity两个文档并整理总结
三、完成五子棋判断胜利方法的设计,下载五子棋棋子png和棋盘jpg
折戟事项:
一、在五子棋棋盘绘制方法上吃瘪,没有头绪
二、没有设计好五子棋放置方法
明日安排:
一、推进《机器人视觉开发指导书》第二篇五项任务进度,并上传教材
二、协助司徒设计制作象棋工站
三、业余时间设计完成五子棋vs版及unity版,并上传教材
————————
2020/1/8周三
完成事项:
一、完成unity连连看设计,并导出exe文件
四、上传俄罗斯方块教材vs版
折戟事项:
一、俄罗斯方块unity版未完成
明日安排:
一、完成俄罗斯方块unity版并上传教材
二、运用vs完成五子棋设计
三、完善整合教材
————————
2020/1/7周二
完成事项:
一、设计完连连看预制体并实现部分功能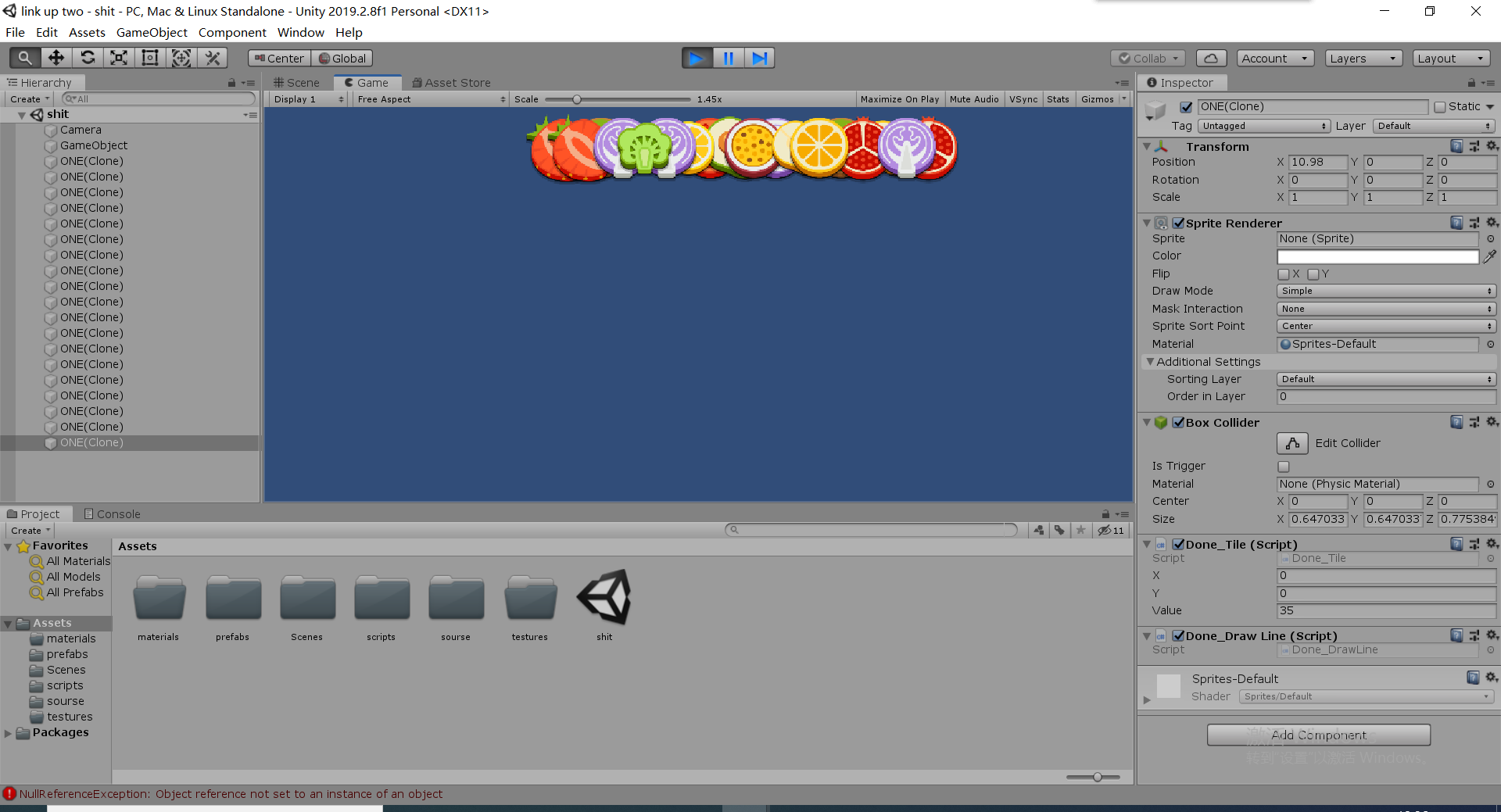
折戟事项:
一、未解决只能手动确认显示方块的问题
二、未解决方块不能连通的问题
三、未解决方块只复制一行的问题
四、未解决每行方块最后一个不复制的问题
明日安排:
把unity连连看调试完成
————————
2020/1/6周一
完成事项:
一、解决连连看bug,将delay改为了sleep,上传程序
二、完成连连看unity脚本编写
折戟事项:
一、未能完成连连看perfabs设计
明日安排:
一、解决unity连连看的运行问题,实现功能,看懂代码,上传教程
————————
2020/1/5周日
完成事项:
一、实现连连看绝大多数功能![@RY$(GYL@~3($_7HM]X7L3G.png](/uploads/projects/afdalzheshi@ncw28b/8720820f22e8b50faf92f971ce882d85.png)
折戟事项:
一、连连看顶边不能连线
二、未知原因,某些方块可以在不符合条件的情况下连通消失
三、未能实现debug
明日规划:
学会debug,调试连连看
————————
2020/1/4周六
完成事项:
一、实现连连看鼠标功能,需要在picture box事件中找到mouse down双击打开输入代码才能实现![DK3~GZ8I}PVZFKMS(26]HML.png](/uploads/projects/afdalzheshi@ncw28b/81602d1307172892a7438cb3a905e1c3.png)
二、解决了直线连接中只能下上连不能上下连,只能左右连不能右左连的问题。
三、解决了左右边界转两个弯连接的问题。
折戟事项:
一、未解决上下边界转两个弯连接的问题。
二、未解决时延问题
明日安排:
继续核对连连看代码,如果任务完成,则将其加入教材,记录流程;学习unity,尝试用unity编写连连看
————————
2020/1/3周五
完成事项:
一、通过修改只读选项,解决了源代码打不开的问题
二、完成连连看部分设计![(W25RT_2]0{45GTM5Z9YKT6.png](/uploads/projects/afdalzheshi@ncw28b/26cb9006ed3bc8ce06bf47fb93ffa7b5.png)
折戟事项:
未能实现连连看鼠标功能,没时间检查代码,明天再说
明日安排:
一、解决连连看鼠标功能未实现的问题
二、学习unity,运用unuty实现连连看
————————
2020/1/2周四
完成事项:
一、整理c#所有运算符和关键字,并标注用途,介绍实例。
二、整理《机器人视觉开发指导书》所有任务,并上传至语雀。
折戟事项:
没有搞懂unity界面如何使用;没有完成连连看设计;
明日安排:
一、用vs完成连连看设计
二、将教材中前七个任务流程发到语雀
————————
2020/1/1周三
完成事项:
一、任务七,能够正常输出
二、任务八,qq的登录与注册
调整了打开窗体的按键逻辑,添加了进入qq后的界面![X]4{~KVM{CNW64XP97E(T6O.png](/uploads/projects/afdalzheshi@ncw28b/c60394e939b335ef4b0a0ecfd98d7c43.png)
三、安装unity
折戟事项:
一、未完成连连看资源加载,未完成俄罗斯方块资源加载
二、未编辑教材
明日安排:
完成连连看和俄罗斯方块的设计,熟悉unity工具,将《机器人视觉开发指导书》第一篇任务一改为教材
————————
2019/12/31周二
完成事项:
一、任务七,创建学生信息表
二、任务八,qq的登录与注册
折戟事项:
任务七,卡在添加的函数里出不来也不知道理由
明日安排:
整理《机器人视觉开发指导书》第一篇,学习几个游戏程序,加入教材中,完善教材。
————————
2019/12/30周一
完成事项:
一、解决昨天问题,平方不能用^時可以使用math. pow(x,x)来实现;窗体不能用read line,要用text box实现功能;学会了使用try。
二、任务二,课后作业制作圆的面积计算窗体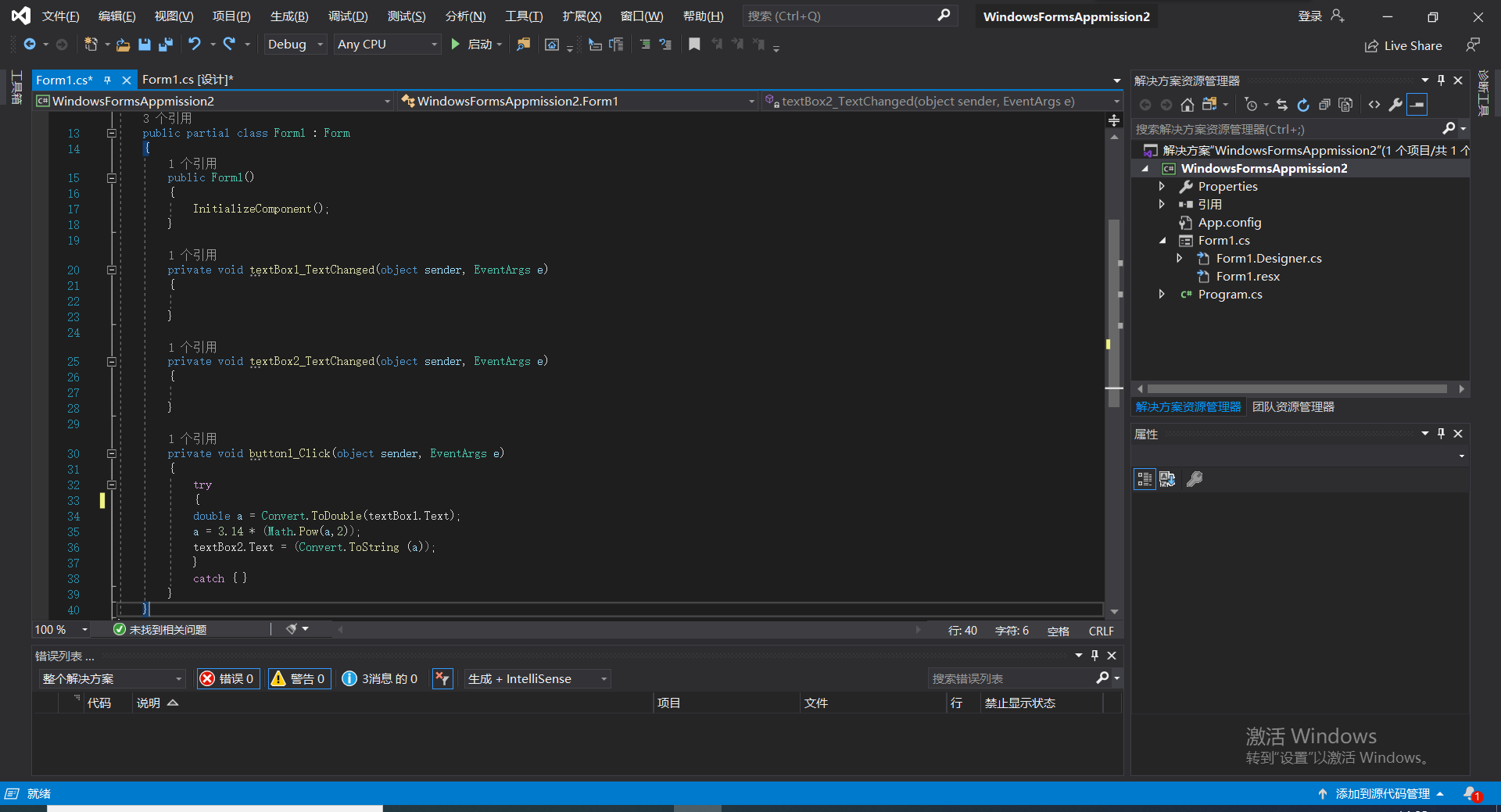
![%]{R(B0D9L9AN]1RV{8RJH9.png](/uploads/projects/afdalzheshi@ncw28b/c58a6cc8093381c3e3adca2884a976ff.png)
三、任务三,设计计算器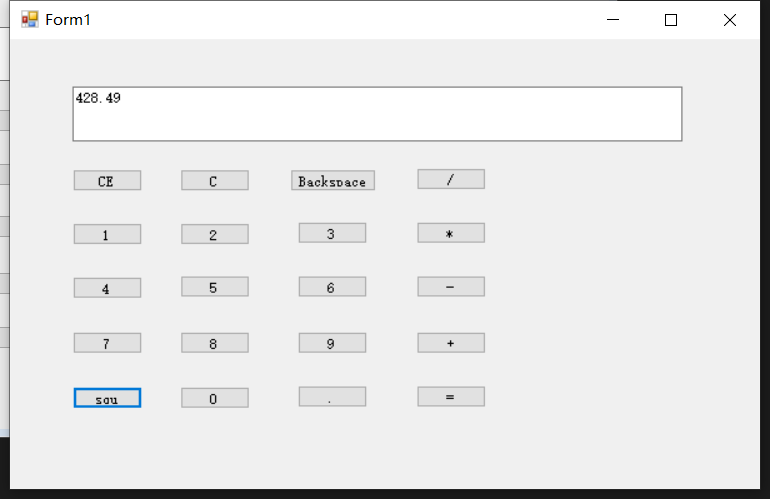
四、任务三课后作业,按销售额计算提成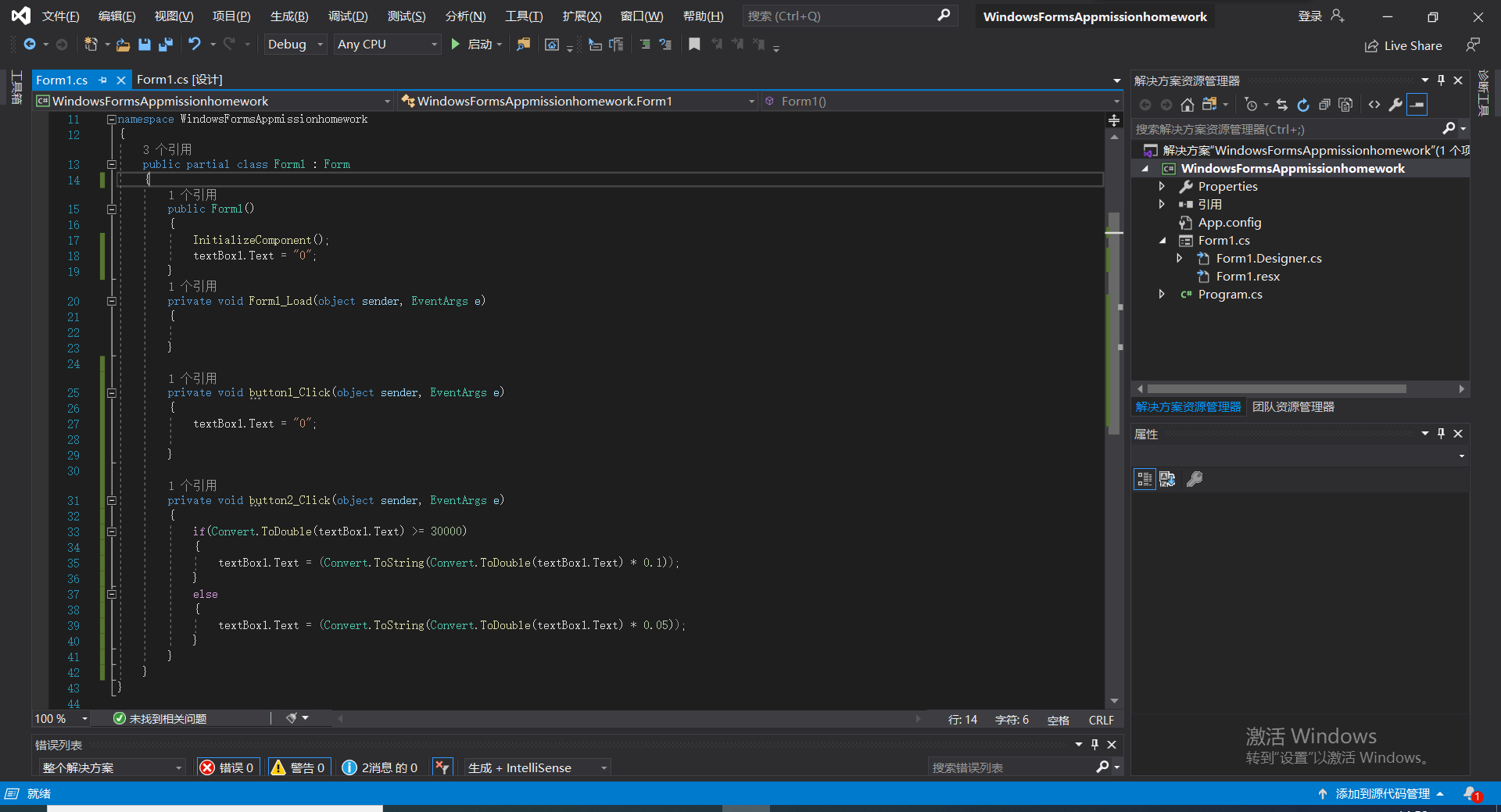![RX8YE@Q5]W311(6T@$I%_)Q.png](/uploads/projects/afdalzheshi@ncw28b/57855b45bd4b0e418316698e182c84a1.png)
五、任务四猜数字游戏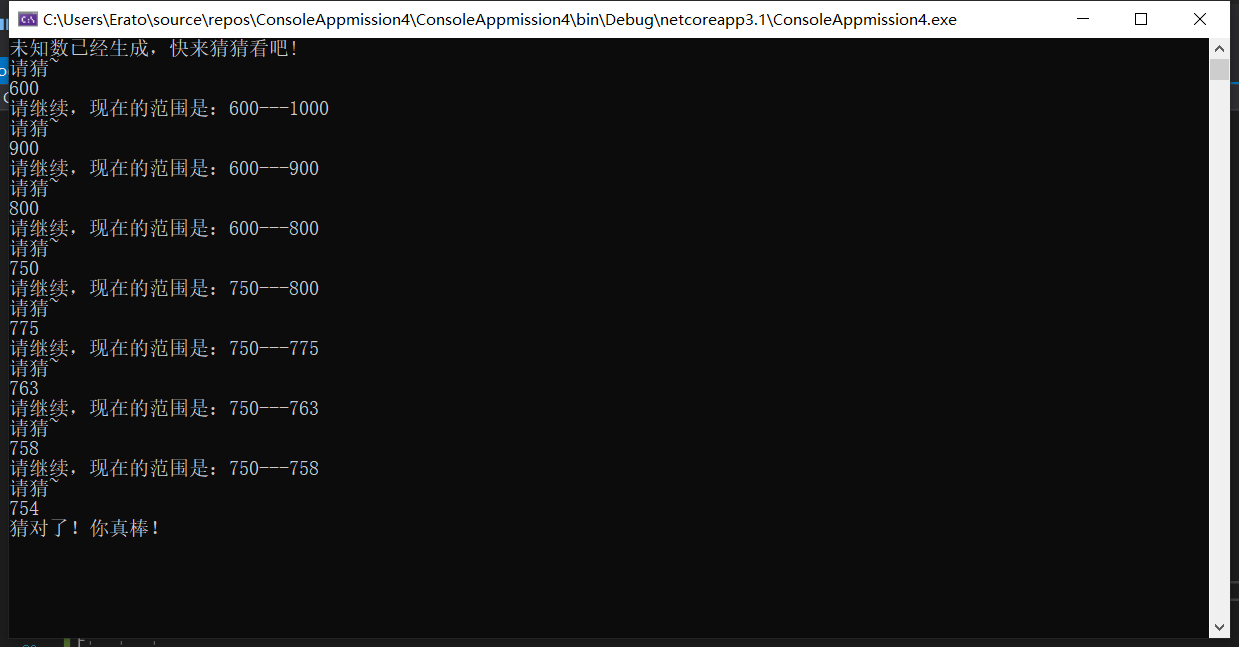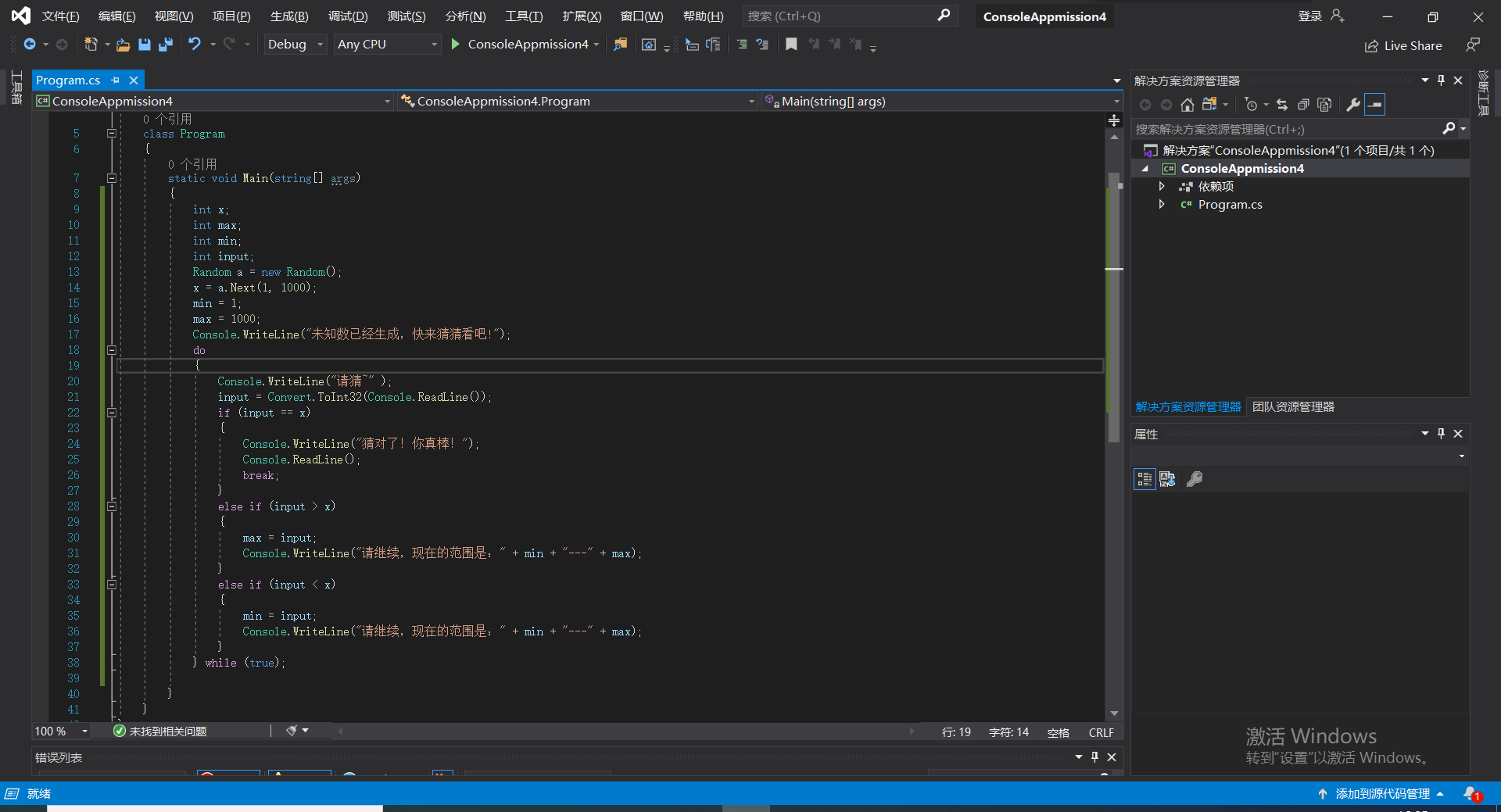<br />六、任务五,有趣的中国古诗<br />第一节:<br />![`DX~2TE5G`]9(9%2CK`UUQY.png](/uploads/projects/afdalzheshi@ncw28b/0d3df686cebdbb05e96ae330498115a5.png)
古诗默写:![1K[X]ZK{B8UI21C~7~3E@PV.png](/uploads/projects/afdalzheshi@ncw28b/2a0487c55aabde72b38ffdc5ce52633f.png)
![O@APX_72]O]_@S1(`)CE6NK.png](/uploads/projects/afdalzheshi@ncw28b/04360f410bad3cf0a942e908bb18e46b.png)
七、任务六:学生成绩单(1)
任务六:学生成绩单(2)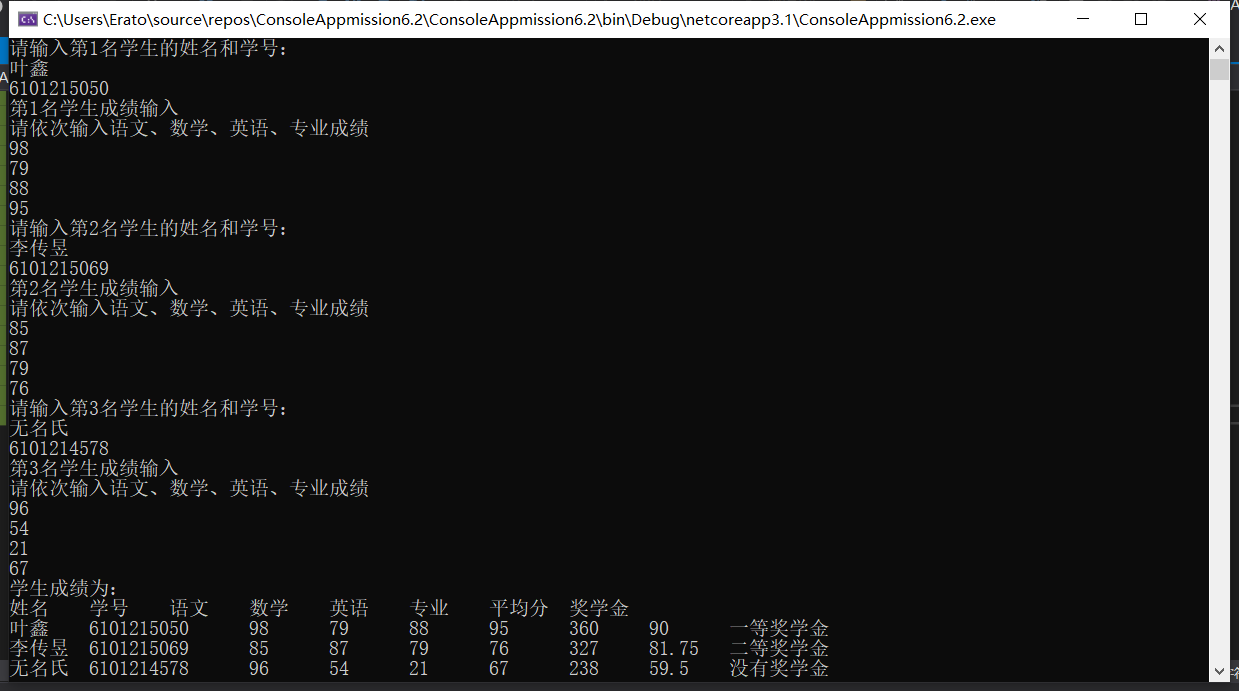
任务六:学生选课系统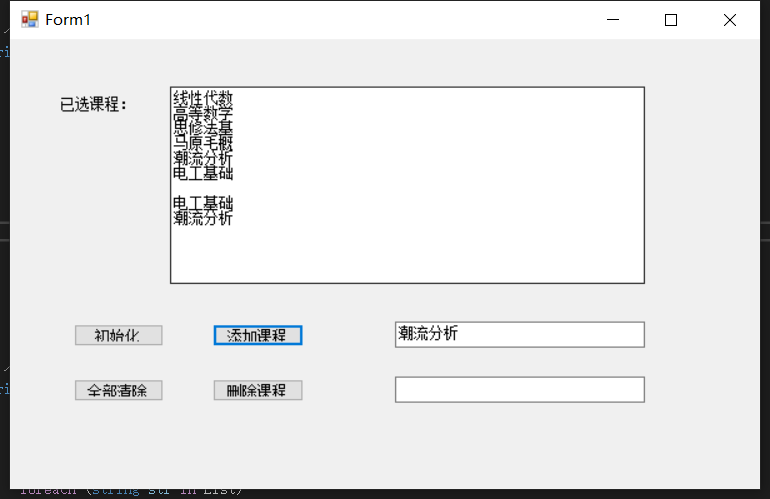
折戟事项:
明日安排:
继续学习开发实训任务指导书
————————
2019/12/29周日
完成事项:
不停报错
折戟事项:
任务二:课后作业,制作圆的面积计算窗口
输出一直都是0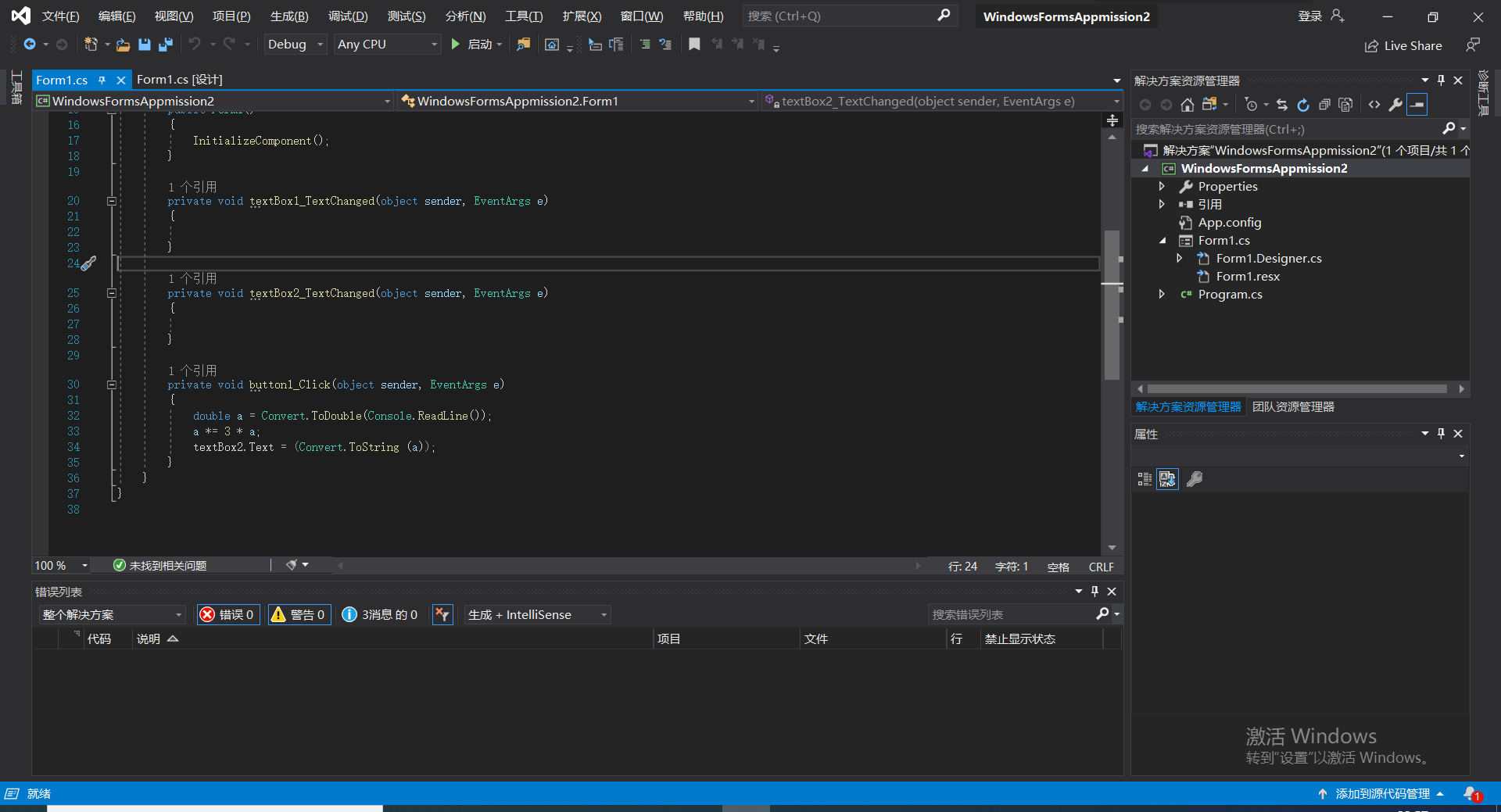 ![E_6@OXH$V@J$9%EGW_RK9N.png
![E_6@OXH$V@J$9%EGW_RK9N.png
任务三:设计计算器![XNJ$J3W(%NWYV1QV41]OLWS.png](/uploads/projects/afdalzheshi@ncw28b/898610babbff101a8d704dd05d4f7da1.png)
明日安排:
搞懂为什么浮点数转换成字符显示的是零;搞懂为什么定义的值只可以写在按钮里面;完成设计计算器
————————
2019/12/28周六
完成事项:
任务一:开发几个简单的c#程序及课后作业![HAMF3]8X~7_{{$_JS$%}~AC.png](/uploads/projects/afdalzheshi@ncw28b/929f8186d0b187c97e5d09bcab6dfba4.png)
任务二:写出学生登记信息(工友信息),写出学生期末成绩(工友薪水)

若有收获,就点个赞吧
0 人点赞

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}