北京信息管理学校 白正超
白正超老师:
各位老师各位朋友晚上好:
现在我来分享一下PBL遥控器的设计与制作。
首先感谢正天激光卢总哈,春节期间给我提供了一套样车让我得以近距离接触到咱们开源机器人这款遥控电路板。
更要感谢陈付军老师哈,他给我提供了一些发射接收电路板可以让我进一步来做一些设计。
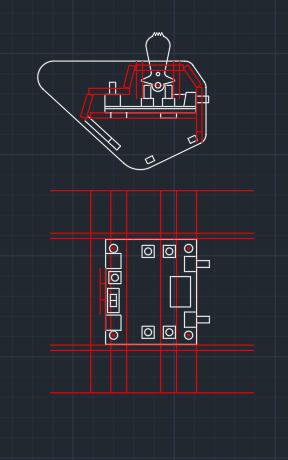
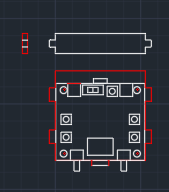
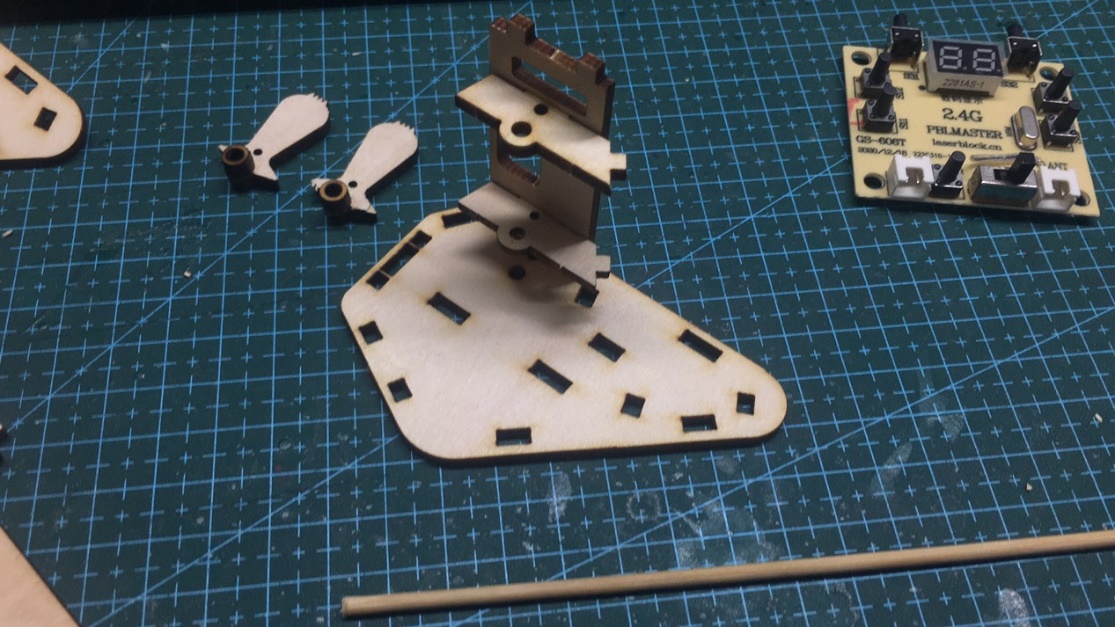
我拿到的成品是这个样子的,平心而论哈这就是个挺好的设计了,有面板、底板、和侧板。
在这一阶段我也见到有些朋友对这个设计做了改动,增加了方便手握的把手。
只是我没顾上收录图片,大家脑补一下。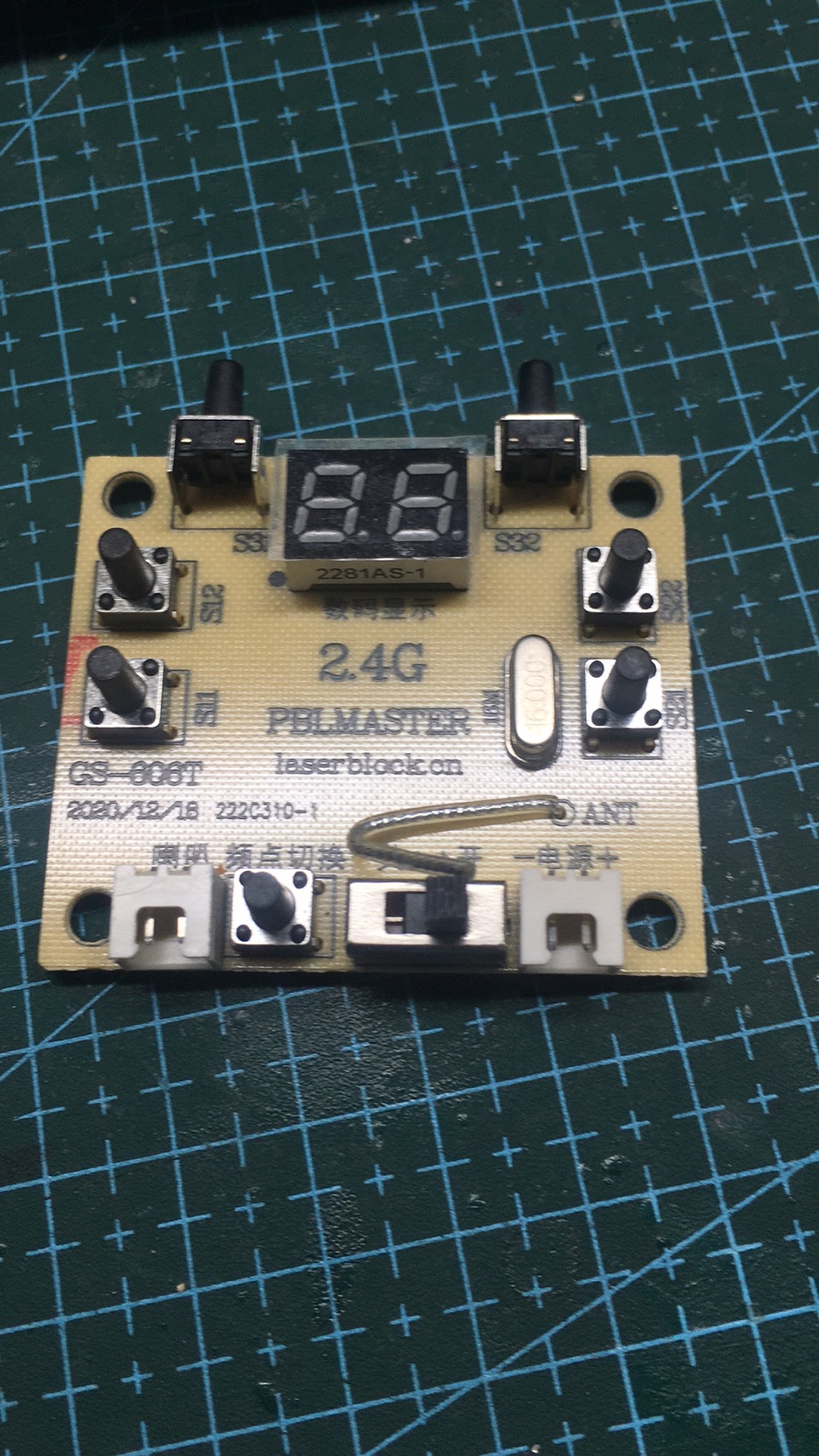
然后这个发射电路板本身是这个样子的;
要想套用成品的设计需要红色的键帽;
不然这几个开关吧有点隔手;
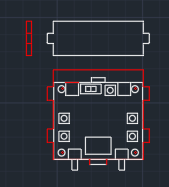
尤其前进后退,我都能想象得到你们真在赛台上受比赛氛围的影响一个个都会死命按开关有木有;
之前我跟陈老师有过交流,我问如果电机正传翻转的开关同时按会怎么样,陈老师告诉我先按的会优先识别,后按的无效;
那么其实使用摇杆从结构上就会避免这样的情况发生,下压前进的时候,会远离后退按钮。
首先说一下这个主要是想告诉大家,我们在设计结构的时候可以通过机械结构或者说物理原理来避免一些可能的破坏。
 好了,我们从第一步开始:
好了,我们从第一步开始:
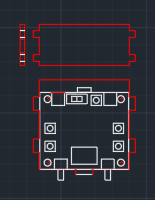
第一条线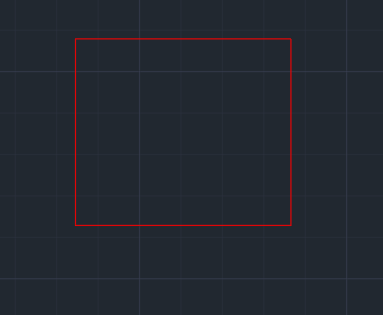
就是一个方框,和电路板的外尺寸一致;
随着卡尺的测量,线会越来越多了;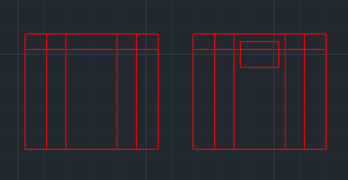
慢慢修饰,各种参照,用某个元件的某条边来定位也行,用按钮的圆心定位也行,总之方法很多。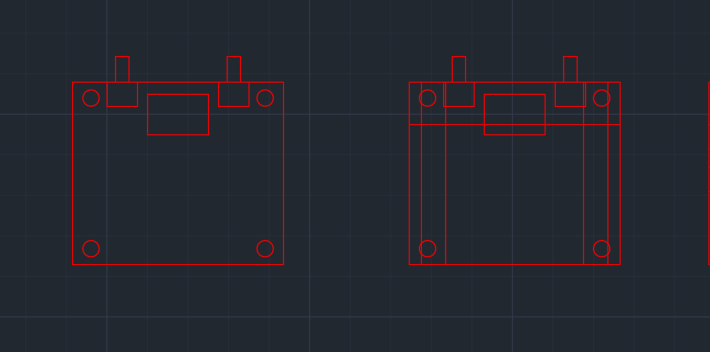
允许有偏差哈,反正激光加工很方便,错了改就是了,这就是我最推崇激光加工的地方,足够便捷,允许犯错,唯快不破。
至少我们需要测量绘制两个视图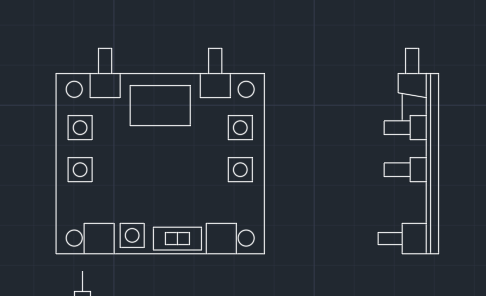
因为我们是要装这个电路板,所以要先有它的信息。又因为我们要在手里拿着,所以我们要有外壳的信息,或者说,符合人体工程学的外尺寸。
刚好我前一阵帮个朋友设计了个小盒子,有个尺寸偏小的不良品在手边,窝在手里还蛮舒服。
图片是想说明指节弯曲的位置比较合理
这部分就是设计这个盒子时的过程图,但我其实想说的说,只要你开始设计,就会积累很多经验和素材。指不定什么时候就用上了
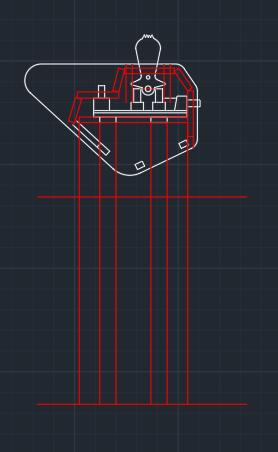
接下来就是把电路板的侧视图和小盒子的侧视图重叠,找到一个最佳位置。如果没有,调整小盒子的尺寸使它配合电路板的厚度。注意电路板不能改哈,那是基准
黄色圆的圆心代表轴,摇杆会做绕轴的运动,嗯摆动
摇杆两侧的线和开关接触,这个夹角就是摇杆摆动的幅度。
无论是cad还是其它的设计软件,我们都可以在设计时模拟它的运动以确认是否合理,比如即要压到按键,又不能压的太狠,所以摇杆两侧的红线代表摇杆的运动极限。
及限位。这个限制不可能靠开关的结构去硬抗,要在给摇杆留出的槽上想办法,如同我一开始所说,通过设计结构避免出现损害
所以最终面板的设计是这样的,最外侧的带倒角的槽就是给摇杆的。
好了我们回来先画第一块要切出来的零件
这是固定电路板的底边,就是在发射电路板下面的这一块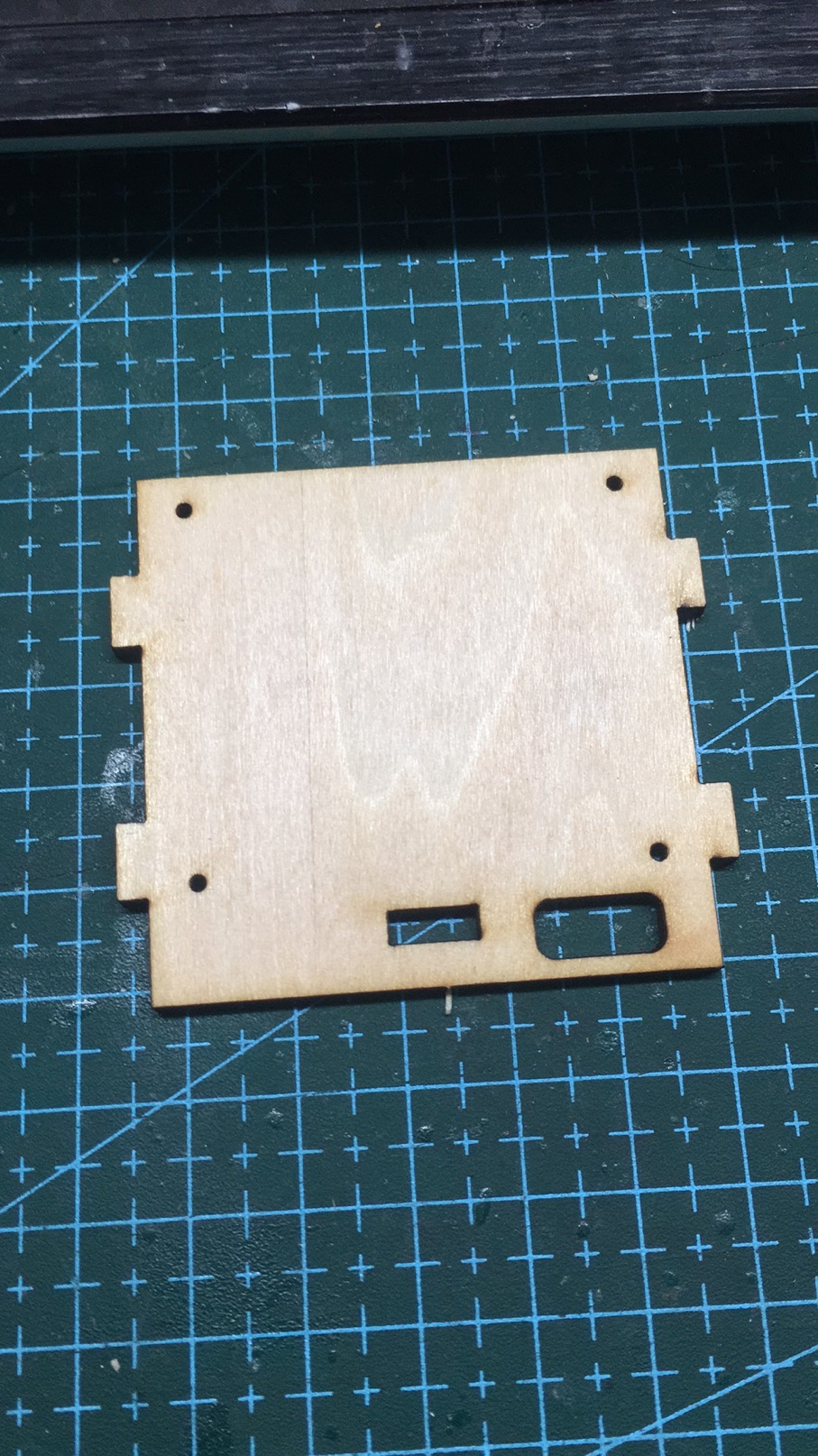
这是它和侧板连接的点,这个信息是可以在侧视图上最先获取的。然后延长线做参照,设定底板宽度,假设它和电路板等宽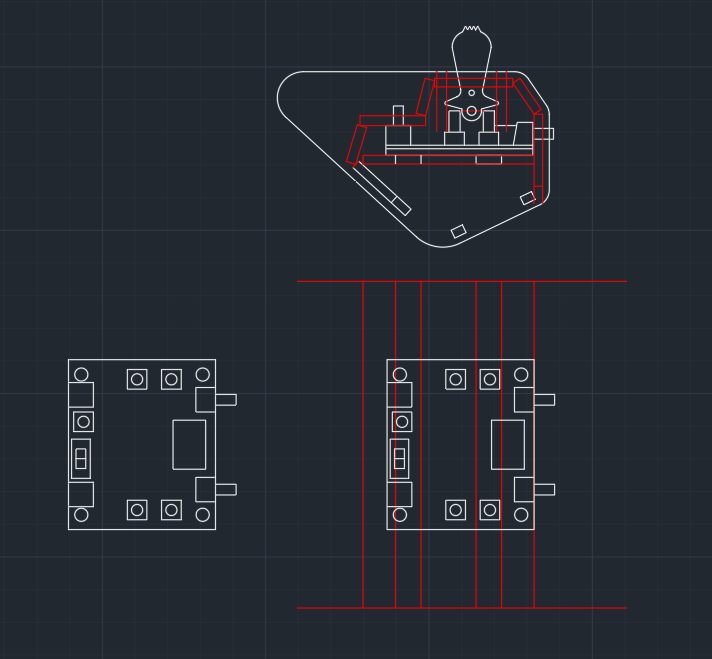
榫卯的榫头已经存在了,接下来只需要删除多余的部分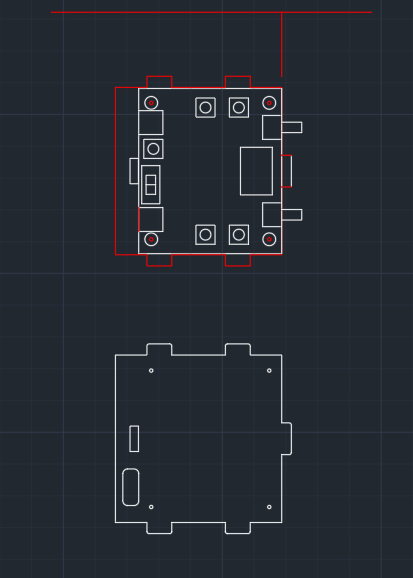
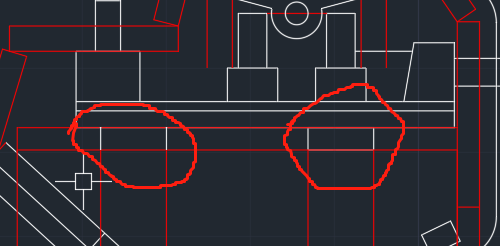
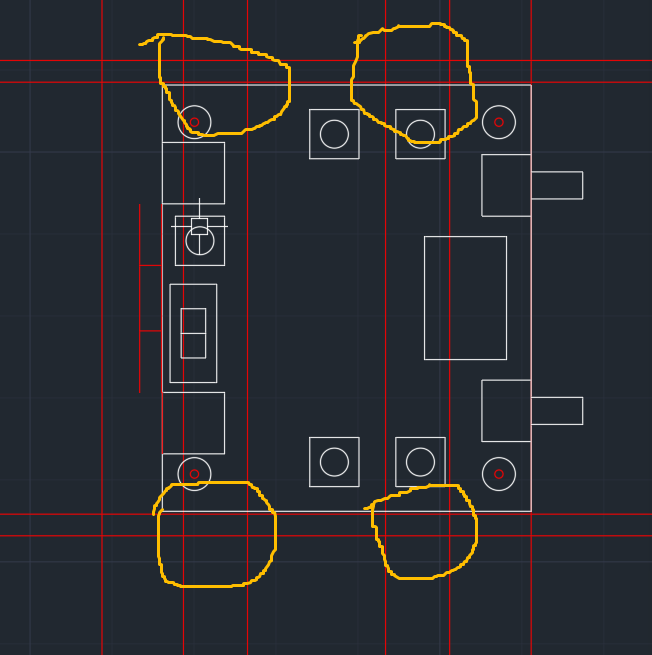
左下角的倒角孔是预留走电源线的,中间画圈的是卯孔,是用来安装限制电路板向下滑动的零件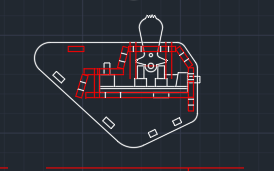
这个看起来像个吉普车似的红色线代表了有这些片包围住电路板,因为开关和调频按钮很低,如果不做一个下陷就需要有类似键帽的东西才能方便的操纵开关。
自由设计么,空间允许的情况下想怎样就怎样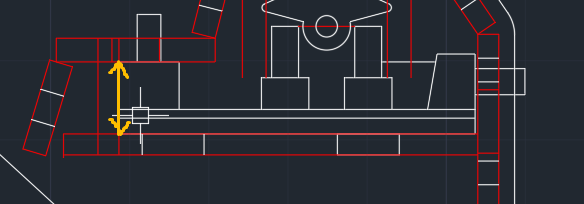
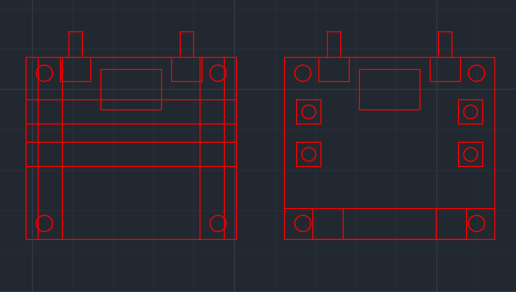
现在有了刚刚说的限制电路板下滑的零件的高度数据了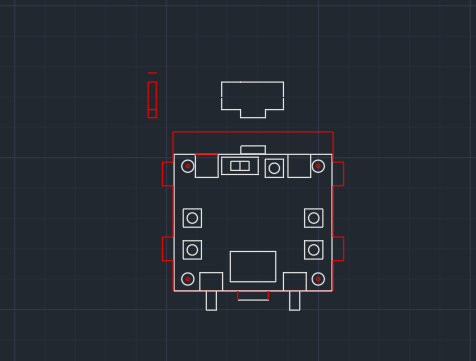

嗯,就是这个了
接下来调整榫卯口的位置,原则是稳固,互不干涉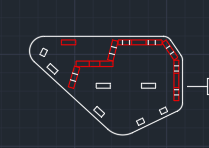
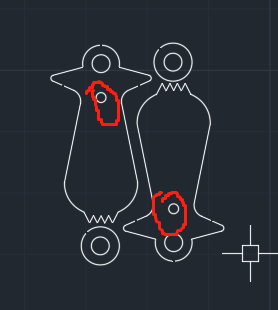
最终修剪出侧板的造型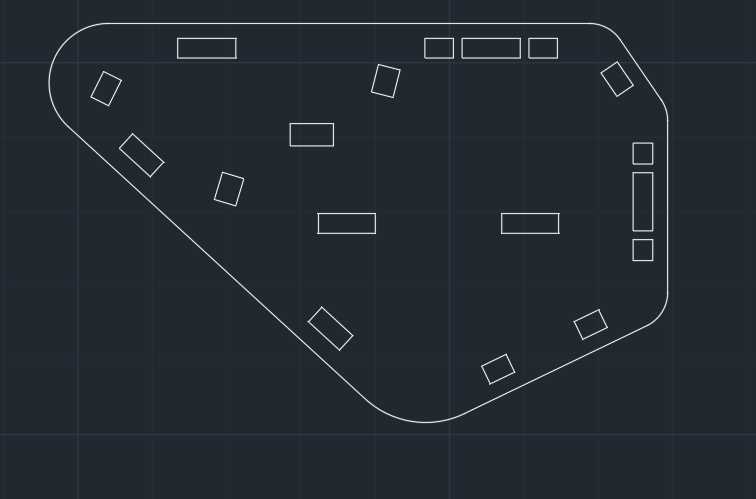
侧板一共是四层,这是内侧的
还没有画完,因为还要穿轴,就是摇杆的轴。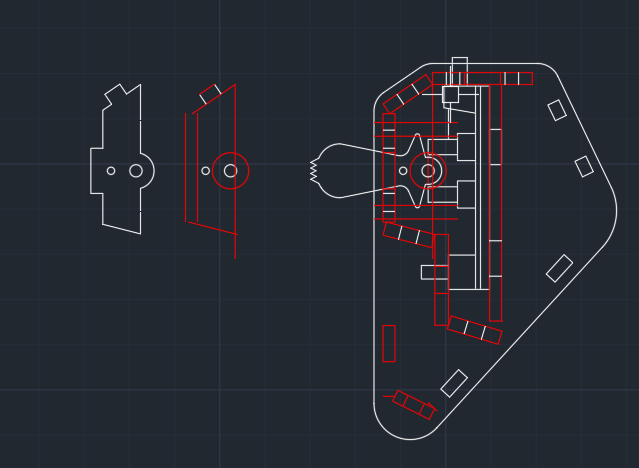
左边的小零件就是在摇杆里侧固定件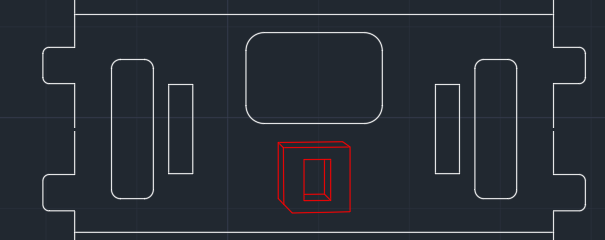
面板上靠里的两个小窄条就是固定它们的卯孔;
大窟窿是为了能看到里面的编号显示屏的;
至于那个红色的图标么。
emmmmm

实在懒得画完了,就画了个o糊弄一下
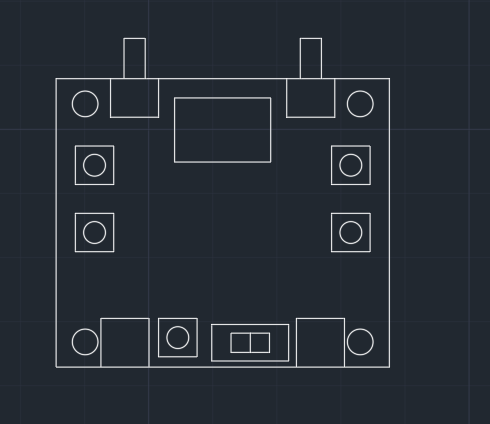
然后的绘制比较枯燥,就是延长线+已知的榫卯关系和宽度交错,然后生成一个一个的面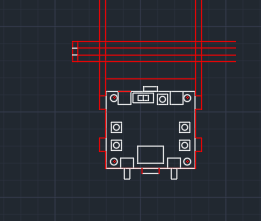

最后这个是顶面,所以要留两个按钮开关的洞。
我从来都不认为cad做这种图方便,但我认为这样设计的逻辑足够清晰,这样学习三视图比普惠群里那个讲视图的ppt生动多了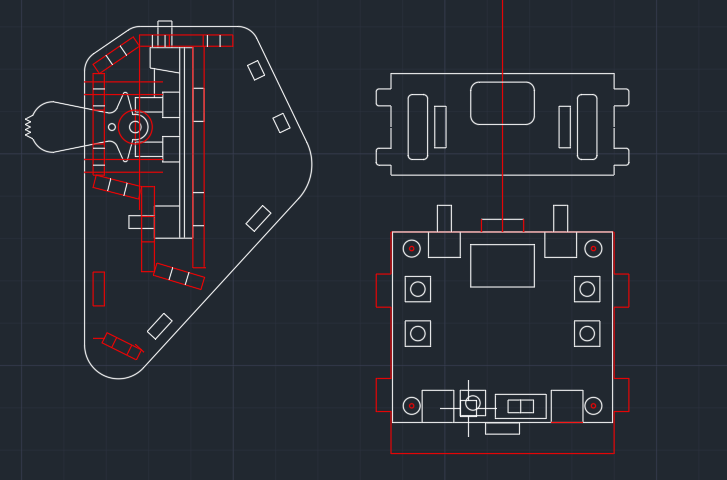
这是面板的由来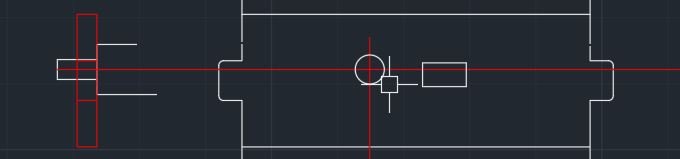
这是调频按钮和开关的面板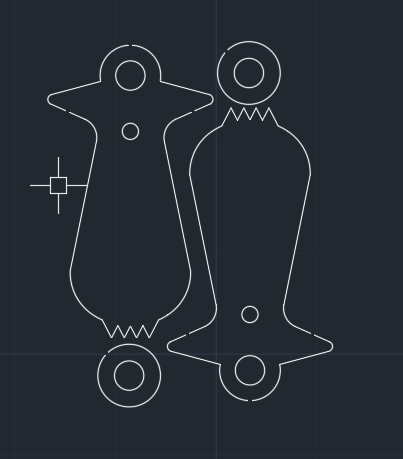
这个是摇杆;
摇杆和小圆垫是用4mm厚的板材来做的,小圆垫在外侧;
接下来就是侧面两个让手握起来更舒服的小盒子的制作了,榫卯孔位最初都已经设计了,从新延长它们直到它们交叉,然后看心情决定哪些长点哪些短点,谁压着谁。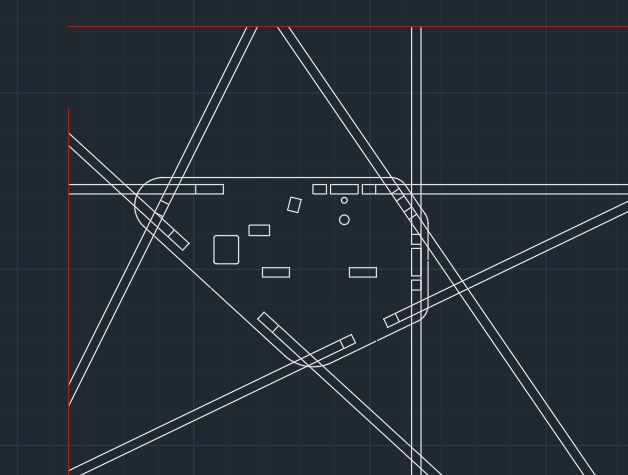
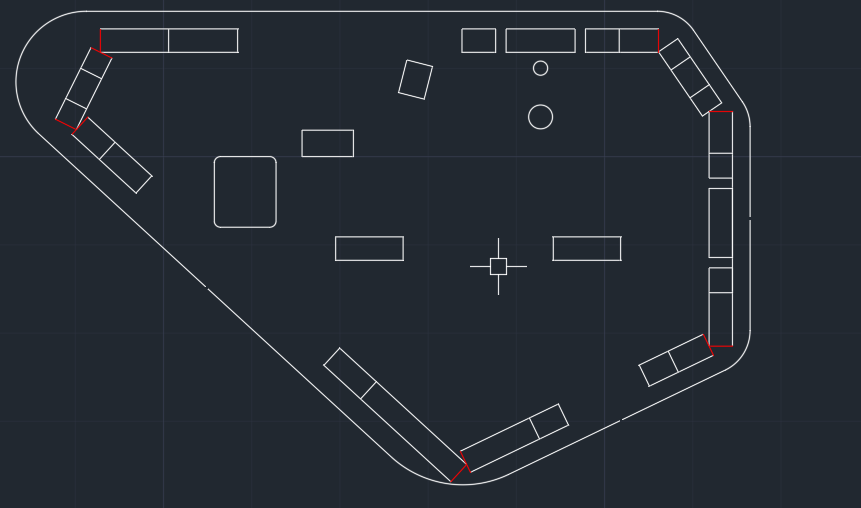
费半天劲其实就是要找到总长和榫卯点的位置,它们一定是关联的,一定要关联来画,4mm也好,6mm也好,尺寸不重要,关系最重要。
由于目前我手里的板子3mm其实也都是2.8左右,所以所有槽宽的设计都是2.65mm;
侧向的让量是0.18mm;
大家拿到图加工完了插不进去只能说明你们的机器比我的好,光路太细,不是我设计的问题。
课间休息
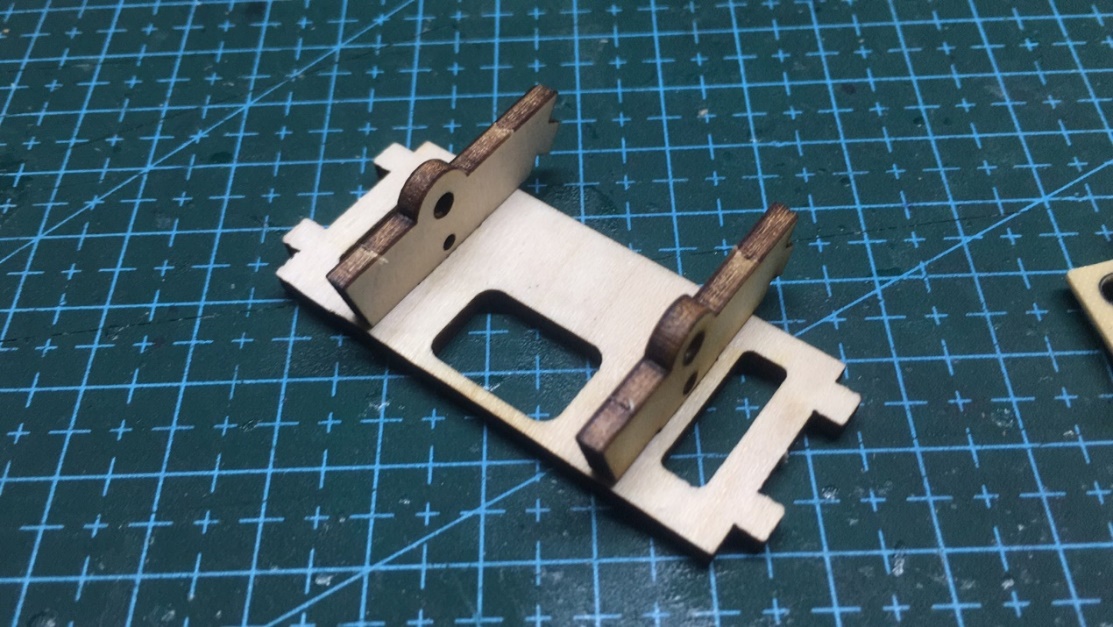
还有个超级知识点没说呢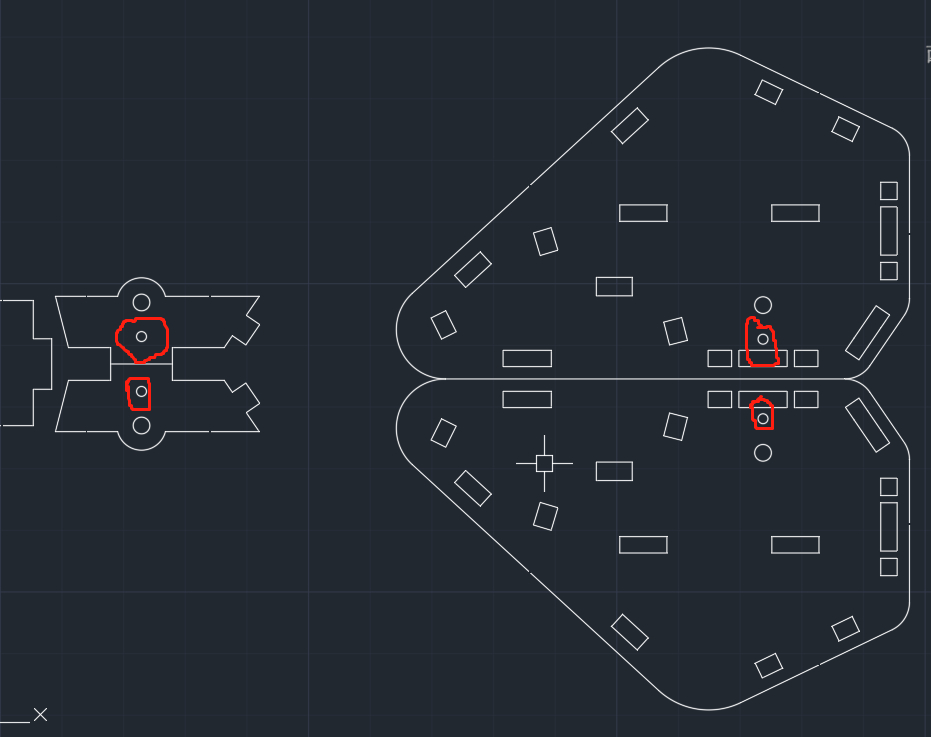
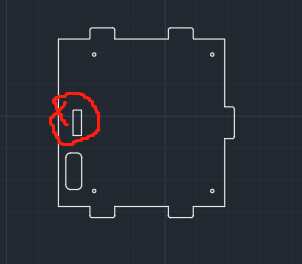
那个大洞是穿轴用的,那么这个小洞干吗用呀?
白正超老师:
这么明显的问题都没人问,可见都没认真思考
微笑的Rockets:
固定电机的啊
微笑的Rockets:
小黄电机那里有个突出的点的
白正超老师:
啊这
白正超老师:
谢谢这位同学的互动,请坐,继续开始
白正超老师:
第二部分是组装过程,刚刚切了一套,还冒烟呢
创客-崔斌:
弹簧居中
白正超老师:
不错不错,终于有认识到回中问题了
只是用弹簧好麻烦,有什么可以替代呢,是那么个意思就行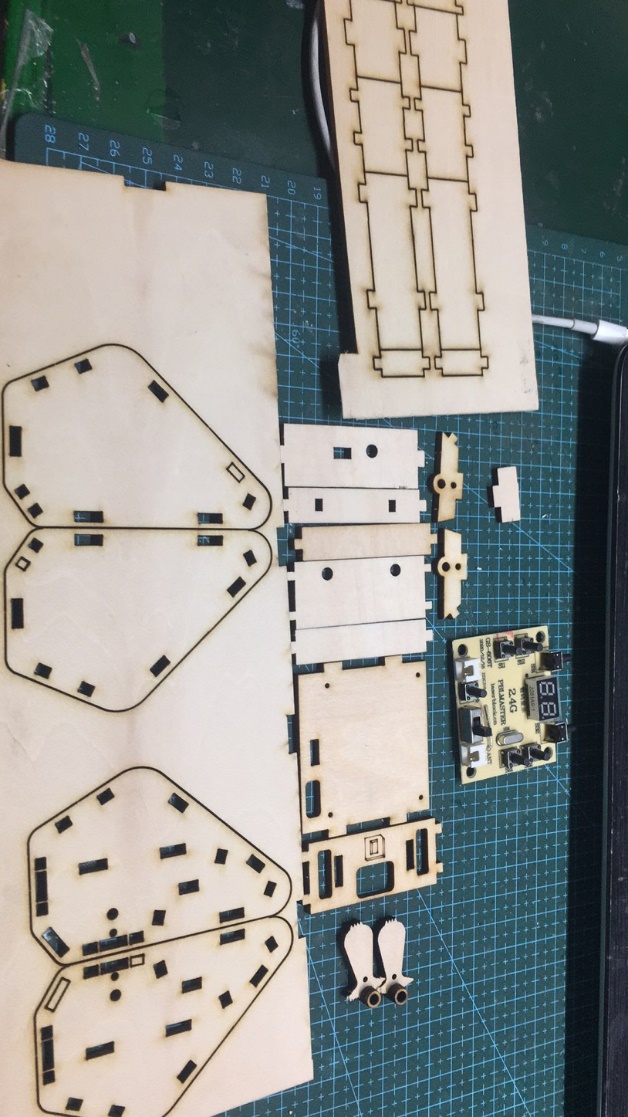

白正超老师:
3mm的小棍哈,没有的去吃羊肉串
滕剑晖老师:
皮筋
白正超老师:
白正超老师:
不好意思,视频里装反了,换另一片就对了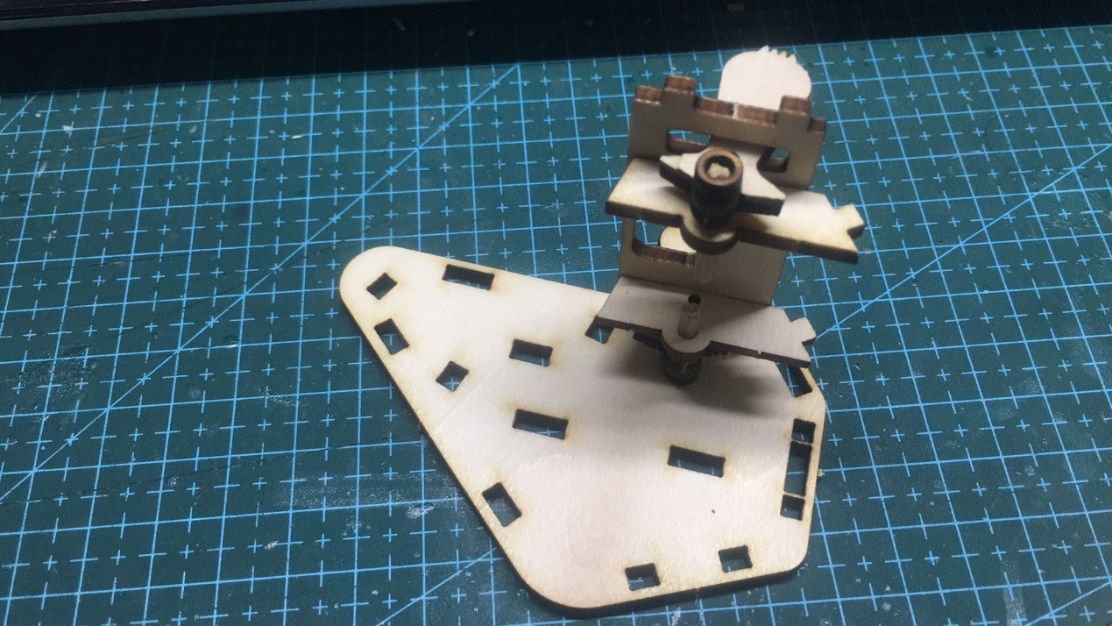
白正超老师:
这回对了
白正超老师:
这回也不对,稍等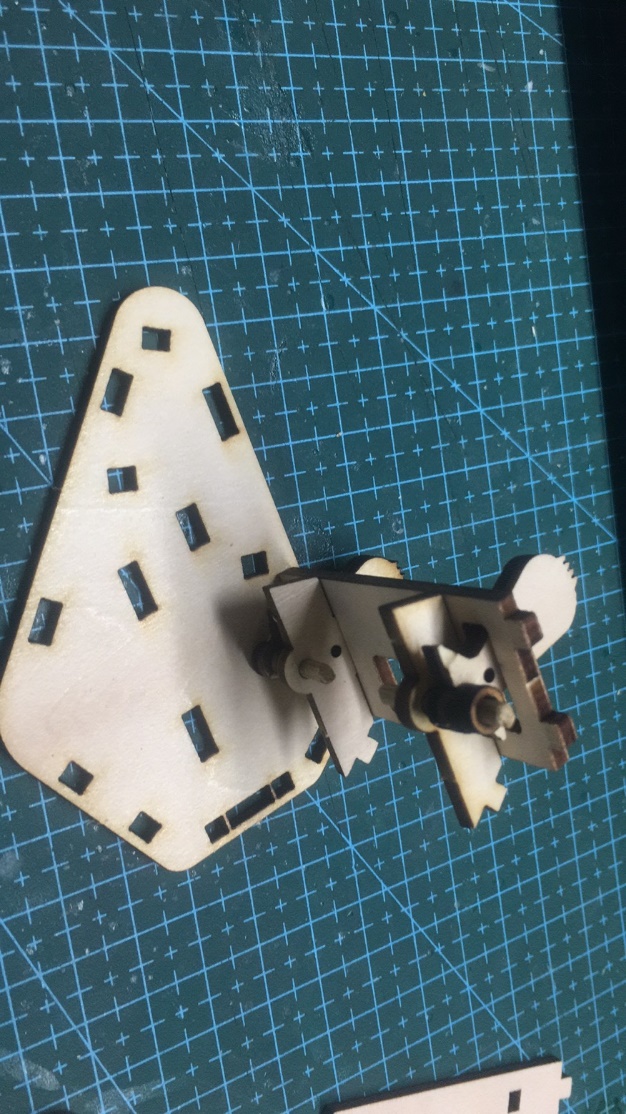
这次是真的对了,把能犯的错误都演示一遍也不容易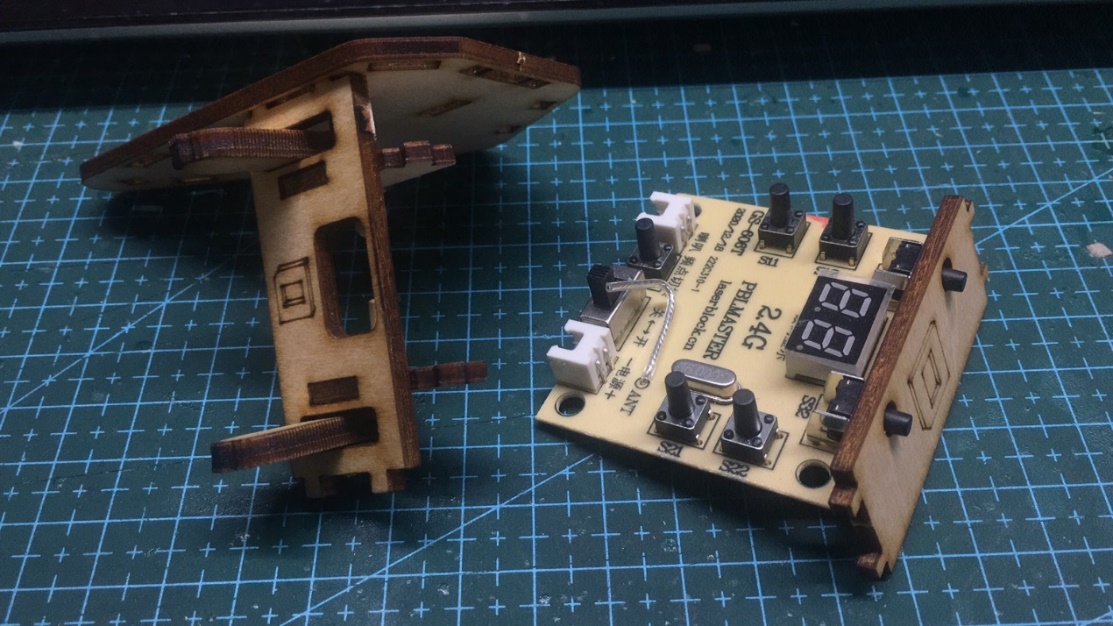
A瓦力计校长:
摇杆要不要穿橡皮筋@白正超
白正超老师:
@阜阳—计老师 不穿皮筋,穿细丝
白正超老师:
先穿细铁丝
白正超老师:
您等大家的进度
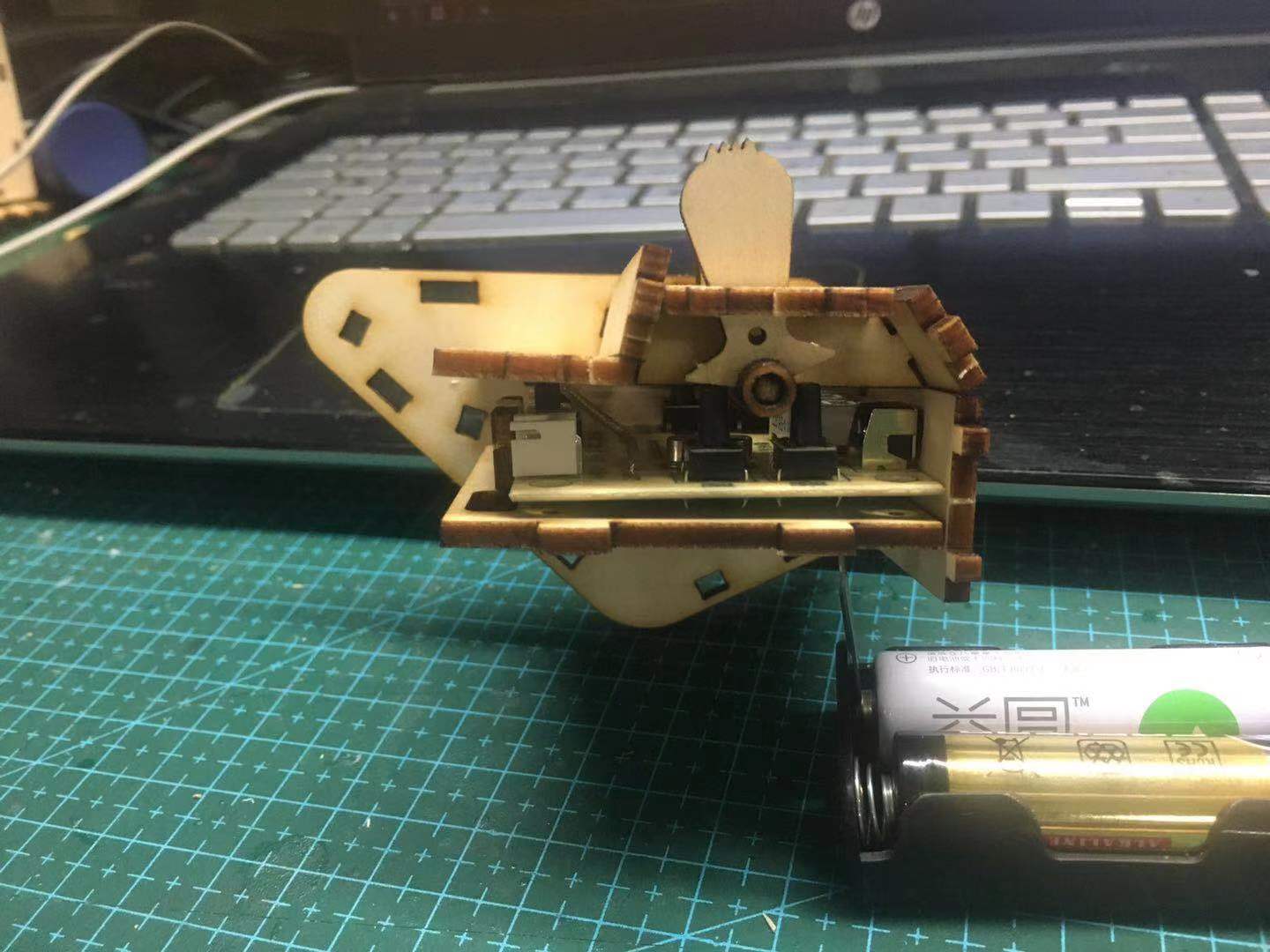

先到这一步,电池盒与作品无关哈,只是不垫着点放不稳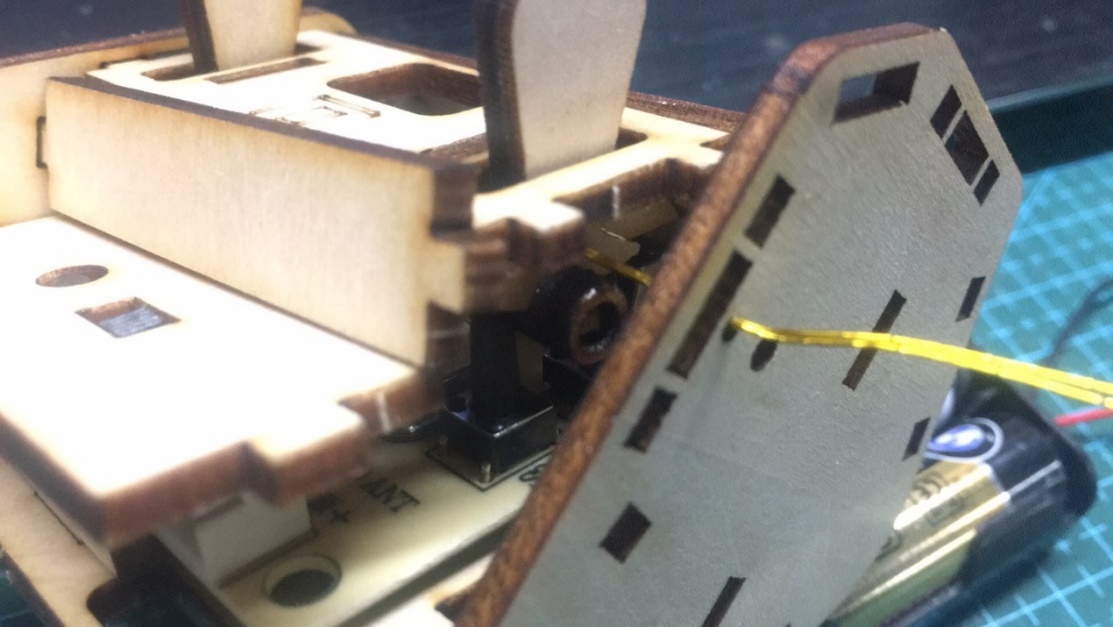
细铁丝贯穿所有小孔从另一侧伸出
好吧我承认这一步带着电路板是挺难的
接下来祭出大杀器
风筝线
再准备两-截小棍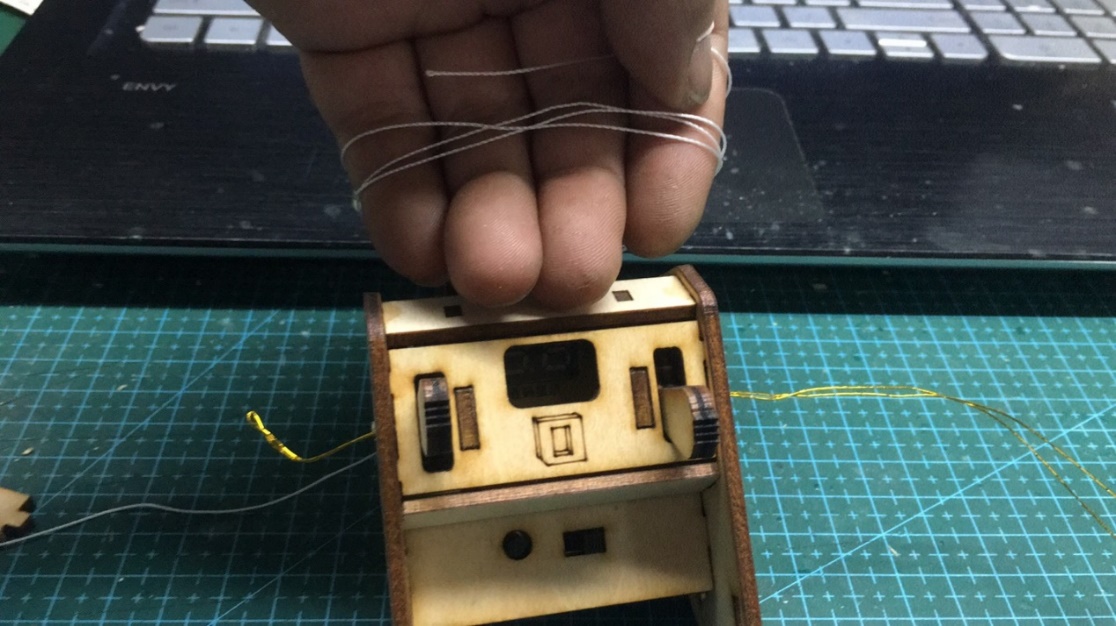
这张图表示风筝线的长度,三或四圈比这个小盒略宽即可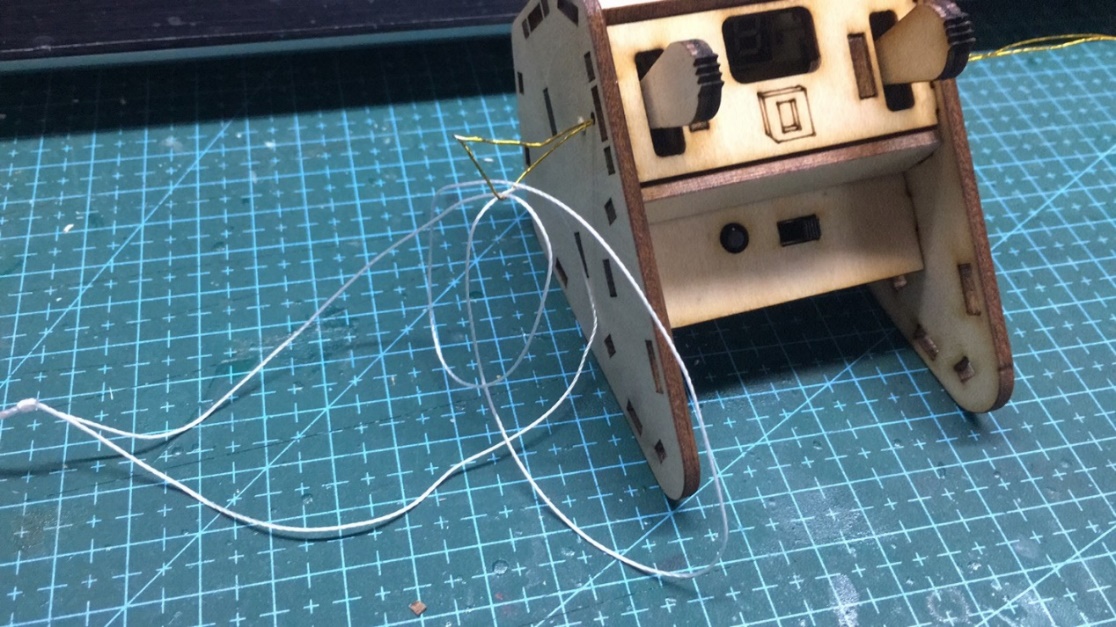
穿到铁丝里三圈再系上哈,咱们是在做东西不是在变魔术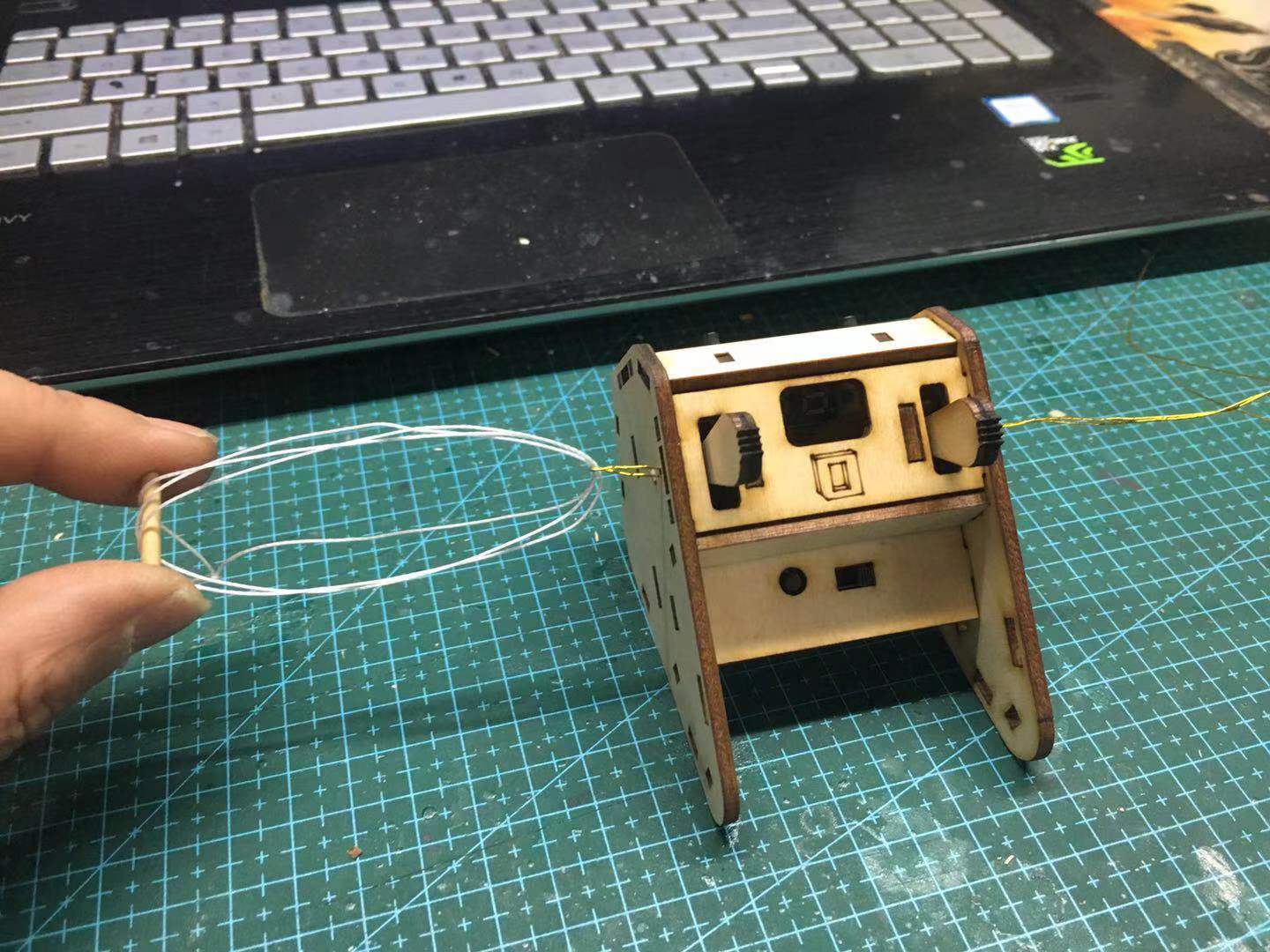

呦 太长了怎么办
绕,使劲绕
把铁丝撤出去换上小棍绕
使劲绕,要相信一定会越绕越短
额叶叉会儿腰
这就是回中设计,觉得松就继续绕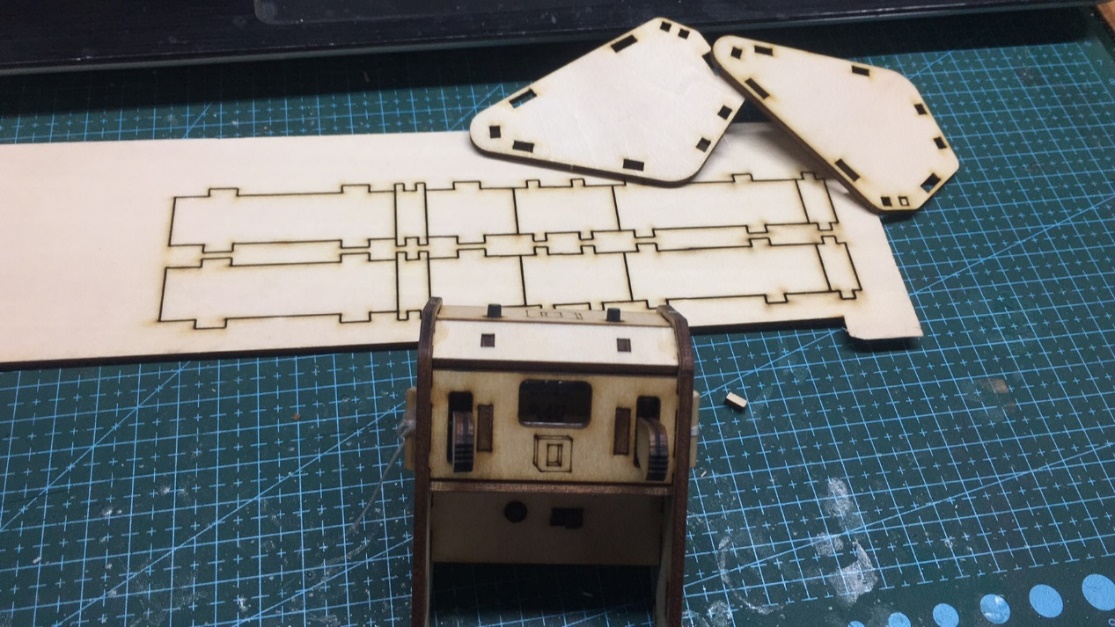
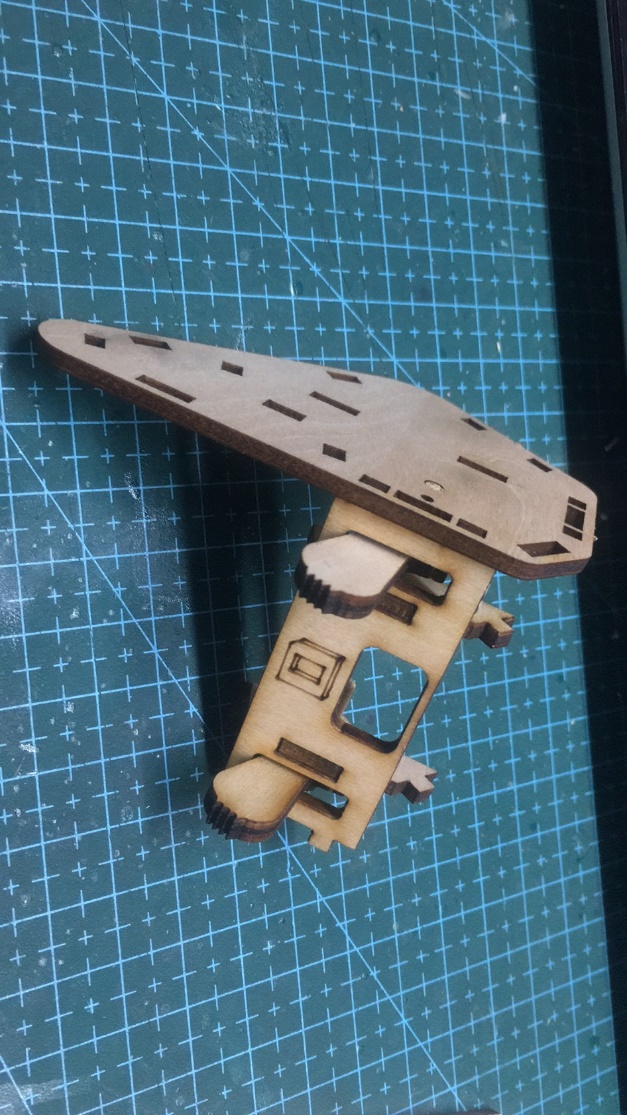
剩下的工作就是把两边的小盒装上了,乏善可陈

今天的分享基本上就是这些,希望大家能有收获,无论是去积累,去尝试,或是对设计过程有感悟,又或是知道了形体关系,斜面构成,还是认识结构的趣出,或是小铁丝小木棍的运用,都是收获,谢谢。
遥控器外壳.zip

若有收获,就点个赞吧
0 人点赞
