追踪模型
LeapMotion API 定义了一系列类来表示每个主要的追踪对象。
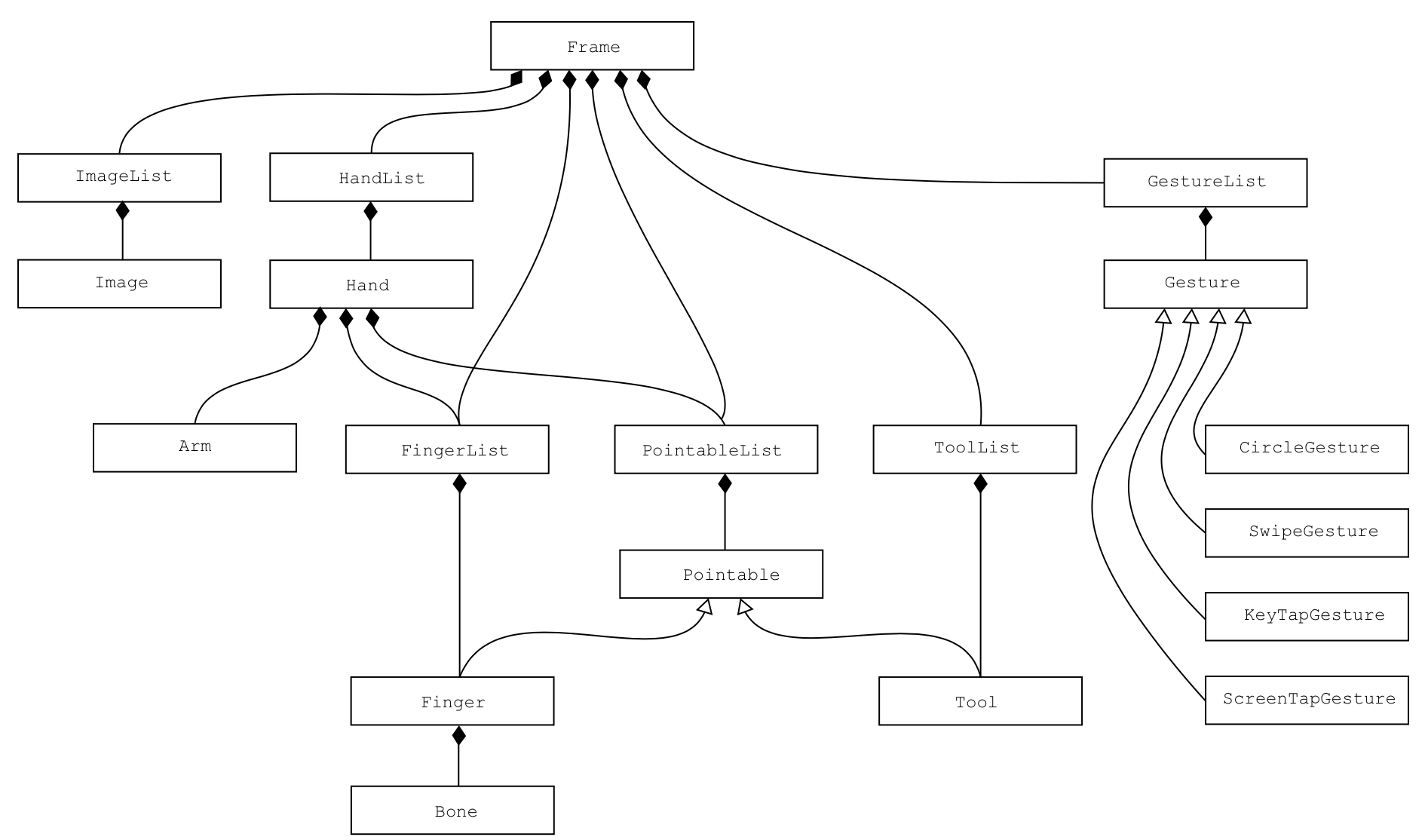
Frame
Frame 是数据模型的基础,提供所有追踪对象实体的访问。每隔一个时间间隔都会创建一个新的 Frame。
帧包含了手、手指、工具以及在当前帧追踪的手势的列表。(你还可以从 Hand 对象关联的特定手中获取手指。)
Hand
Hand 对象描述了一只手的位置和方向。通过在帧和包含那只手所关联的手指的列表之间追踪它的动作。
# 手是一个 Leap.Hand 对象pointables = hand.pointablesfingers = hand.fingers
Arm
Arm 对象描述了一只手所附加的手臂的位置和方向。手臂只能通过 Hand 对象来访问。
Pointable、Finger、Tool
Pointable 对象为手指和工具定义了基本特征。Finger 和 Tool 类从 Pointable 类扩展而来,为这些实体增加了特定的信息。
if (pointable.is_tool):tool = Leap.Tool(pointable)else:finger = Leap.Finger(pointable)
Bone
Bone 对象表示骨头的位置和方向。被追踪的骨头包括手指的 Metarcapals 和 Phalanges 骨。
Gesture
Gesture 类和他的子类表示了 LeapMotion 软件所能识别的四中不同的手势。
Image
Image 对象提供了 LeapMotion 摄像头的原始传感器数据以及一个校准镜头畸变的网络(不能通过 WebSocket 服务获取)。
追踪目标的列表
帧和手对象以及其他追踪物体的列表。
HandList、PointableList、FingerList 以及 ToolList 提供了一些便捷的函数和列表成员过滤器。例如,frontmost()函数返回的是 LeapMotion 控制器视野中最前面放的物体(z 轴值最小的物体)。
工具类
Vector 类描述了点和方向,Vector 类还提供了一些有用的数学函数用来处理向量。
同样,Matrix 类描述了类似旋转的变换,通过一些 API 函数来返回。
InteractionBox 类帮助LeapMotion 控制器视野的一部分直线映射到二维屏幕空间或者三维空间。参考模拟触摸。

若有收获,就点个赞吧
0 人点赞
