1、前车转向计算
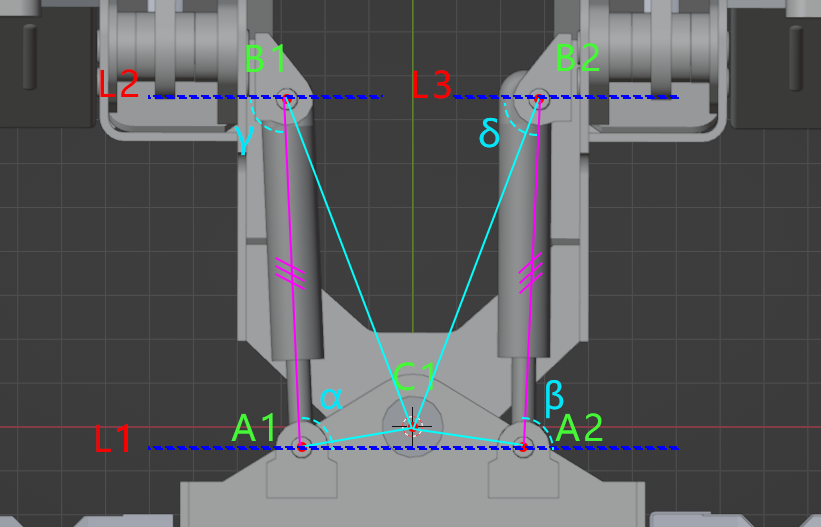
当装载机前车沿C1轴做左右转向运动时,A1B1(液压油杆)、A2B2(液压油杆)、B1A1(液压油缸)、B2A2(液压油缸)的运动轨迹,就是分别求出∠α、∠β、∠θ、∠λ的角度。
1.1、求∠α、∠β的角度
解:
∵ 在三维模型中所有点的位置是已知的,根据欧氏距离的三维空间公式:

可求出两点之间的实际距离ρ。
∴ ⊿A1B1C1、⊿A2B2C1、⊿A1A2C1的各边长为已知长度。
∵ ∠α = ∠B1A1C1 + ∠C1A1A2, ∠β = 180 - ( ∠B2A2C1 + ∠C1A2A1 ),
∴ 根据三角函数余弦定理可得:
:::info cos∠B1A1C1 = (A1B12 + A1C12 - B1C12) / (2 A1B1 A1C1)
cos∠C1A1A2 = (A1C12 + A1A22 - C1A22) / (2 A1C1 A1A2)
cos∠B2A2C1 = (A2B22 + A2C12 - B2C12) / (2 A2B2 A2C1)
cos∠C1A2A1 = (A2C12 + A1A22 - C1A12) / (2 A2C1 A1A2)
:::
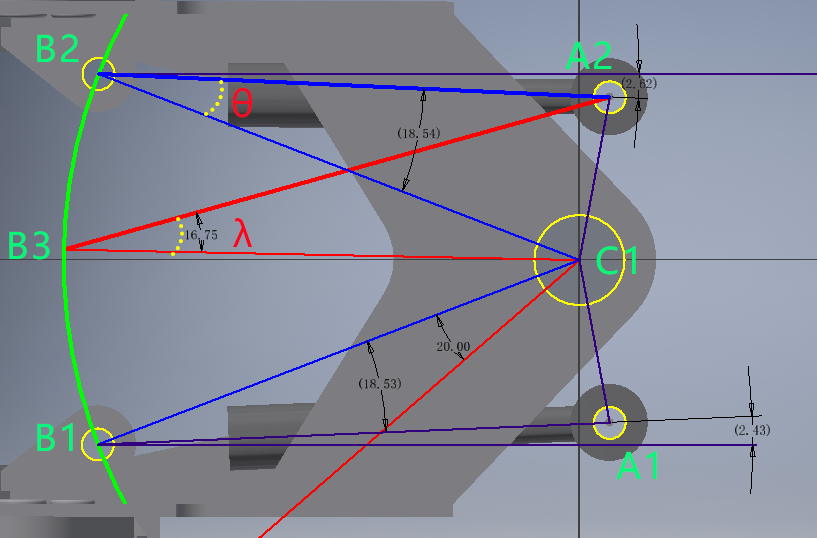
1.2、求∠θ、∠λ的角度
当装载机前车沿C1轴做转向运动从蓝色区域运动到红色区域时∠θ到∠λ的角度变化值即为B1A1(液压油缸)、B2A2(液压油缸)的运动轨迹,计算过程请参考∠α、∠β的计算过程。
注意:所有参考点必须在同一平面。
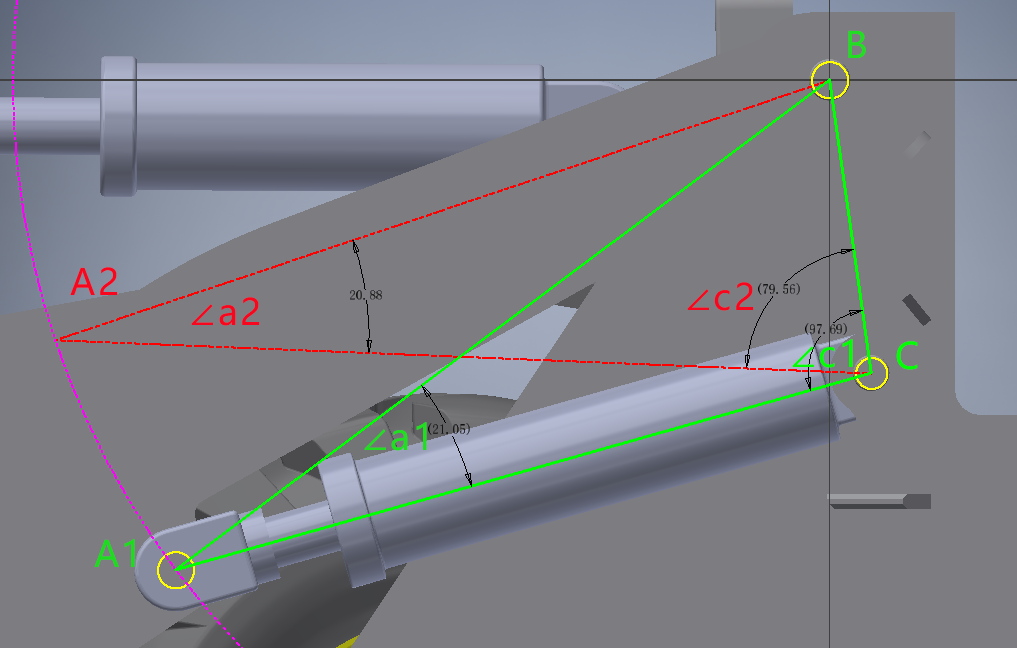
2、动臂运动角度计算
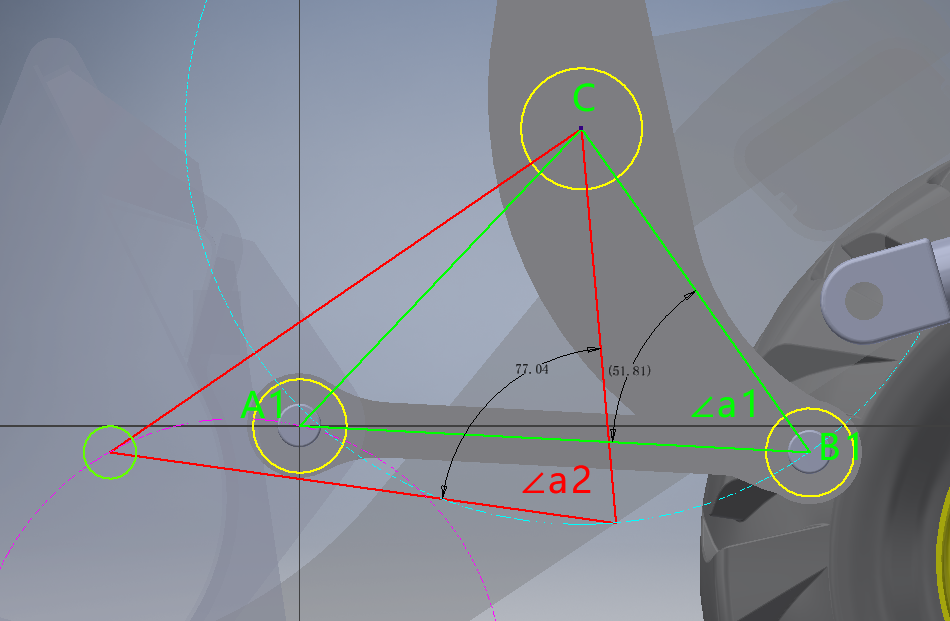
当装载机动臂沿A1点运动到A2点时,∠a1到∠a2的角度变化值即为A1C(液压油杆)的运动轨迹,∠c1到∠c2的角度变化值即为CA1(液压油缸)的运动轨迹,计算过程请参考前车转向计算∠α、∠β的计算过程。
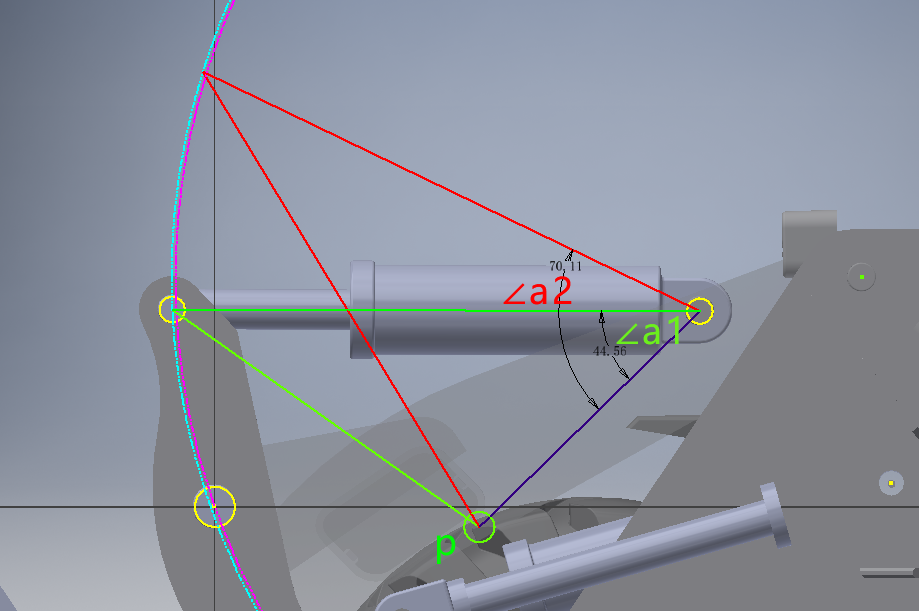
3、摇臂油缸运动角度计算
3.1摇臂油杆
当装载机动臂与摇臂运动时,∠a1到∠a2的角度变化值即为摇臂油杆的运动轨迹,计算过程请参考前车转向计算∠α、∠β的计算过程。
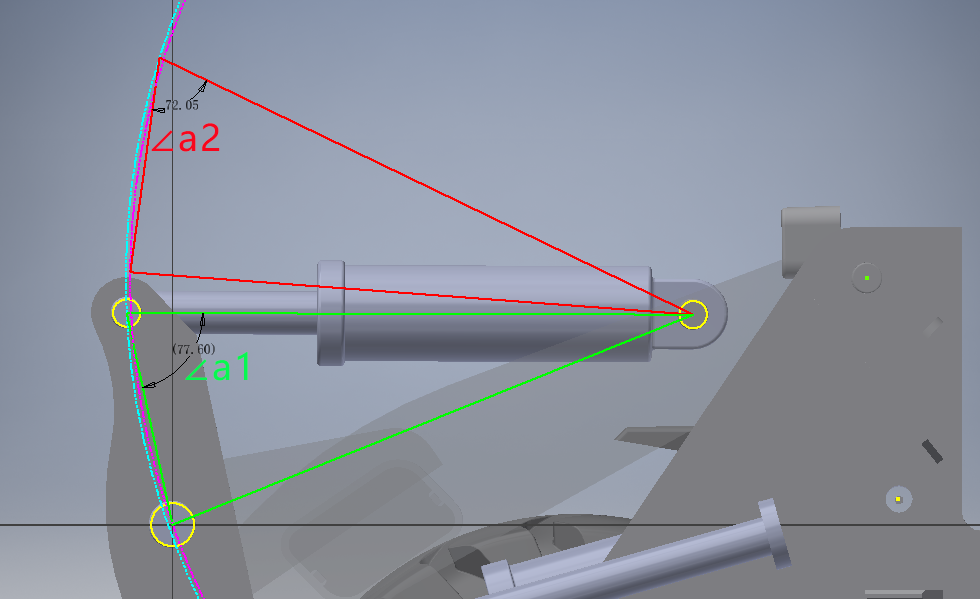
3.1摇臂油缸
当装载机动臂与摇臂运动时,定义参考点p,∠a1到∠a2的角度变化值即为摇臂油缸的运动轨迹,计算过程请参考前车转向计算∠α、∠β的计算过程。
4、铲斗运动角度计算
引用中南大学硕士学位论文——装载机机构建模及显示控制器软件开发.廖凯
装载机工作装置可以视为一个由动臂油缸和转斗油缸控制反转六杆机构。选择机架作为反转六杆机构工作装置的运动参考系,如图2-3所示的平面直角坐标系XOY。由机械原理可知机构的运动自由度为2,即在广义坐标下,机构的运动状态可以由两个变量来描述。当铲斗的位置角 β2 和动臂位置角 β1 确定后,机构的运动状态就唯一地被确定,故可选 β1 和 β2 作为自变量来确定铲斗的运动位置。因此第一个角传感器安装在 G 点测量 β1 ;而第二个角传感器考虑到实际条件,不便于安装在铰点A位置来测 β2 ,从安全角度需要远离铲斗,所以可以选择反转四杆机构ABCD的D点间接测 θ ,因此还需要将 θ 与 β2 角进行转换。单位:角度(度数),长度(MM)
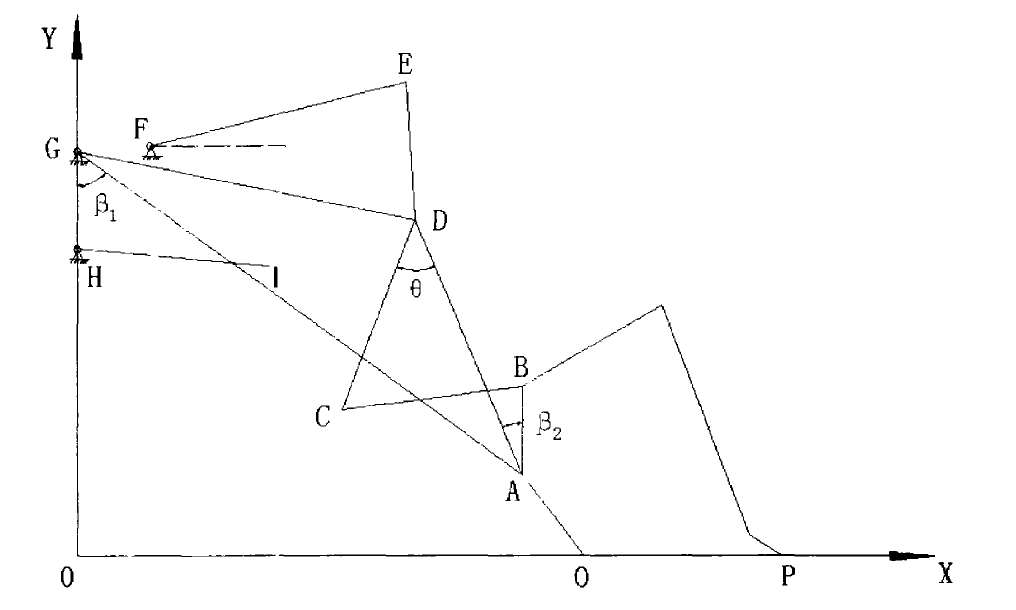
表 2.4 工作机构符号定义
| 符号 | 物理意义 | 符号 | 物理意义 |
|---|---|---|---|
| R1 | 动臂ΔAGD中AD杆长 | β1 | 动臂AG与Y轴夹角 |
| R2 | 铲斗上AB点距 | β2 | 四连杆ABCD中∠BAD |
| R3 | 连杆BC长 | β3 | ΔFGD中∠FGD |
| R4 | 下摇臂CD杆长 | β4 | ΔFGD中∠GDF |
| R5 | 动臂GD杆长 | β5 | ΔFDE中∠FDE |
| R6 | 上摇臂DE杆长 | β6 | ∠EDG |
| R7 | 任意工况EF长 | β7 | AB杆与铲底的夹角 |
| R8 | 机架杆GF长 | θ | 四连杆ABCD中∠ADC |
| R9 | 动臂举升杆GI长 | γ1 | 动臂ΔADG中∠GAD |
| R10 | 机架杆GH长 | γ2 | 动臂ΔADG中∠DGA |
| R13 | 铲斗尖P与A点的距离 | γ3 | 铲斗尖∠P |
| R12 | 动臂缸最短时长度 | γ4 | ∠IGA |
| R22 | 动臂缸最长时长度 | β11 | 动臂油缸ΔGIH中∠IGH |
对应图2-3所示。
转斗角 β2 只受摇臂角的影响。在反转四杆机构ABCD中,已知杆长和某一角度,求取其他的角度是无法用简单的三角关系来求得的,这里借助美国弗罗伊登斯坦(F.Fredenstein)提出的近似综合用解法。
r - q _cosθ + _p _cosΦ = cos( θ - Φ _) (2-2-13)

θ 角为 R1 与 R4 的夹角,Φ 角是 R1 与 R2 的夹角。这两个角是同向角,因为本机构是一个反转机构,所以 β2 = π - Φ ,为了区别 R2 与 R4 的运动位置,我们令两杆与 R1 异边时 β2 角为“+”,否则为“-”。
具体处理方法:
r - q _cosθ + _p _cosΦ = cos( θ - Φ ) = cosθ cosΦ + sinθ sinΦ_
(r - q _cosθ )+ (_p - _cosθ ) cosΦ = sinθ sinΦ_
令: A = (r - q _cosθ ) ; _B = (p - _cosθ ) ; _C = sinθ ;
得: A + B cosΦ = C _sinΦ_
 (2-2-14)
(2-2-14)
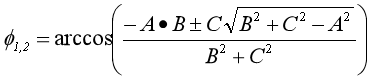
取: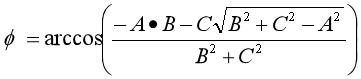 (2-2-15)
(2-2-15)
当 θ < θ临界 , β2 = π - Φ = f(θ) (2-2-16)
当 θ ≥ θ临界 , β2 = Φ - π = f(θ) (2-2-17)
注:θ临界 角是指AB杆与AD杆重合时的角度
5、拉杆运动角度计算
在确定好铲斗运动角度之后,就可以确定拉杆运动角度了。当装载机摇臂运动时,∠a1到∠a2的角度变化值即为拉杆的运动轨迹,计算过程请参考前车转向计算∠α、∠β的计算过程。

若有收获,就点个赞吧
0 人点赞
