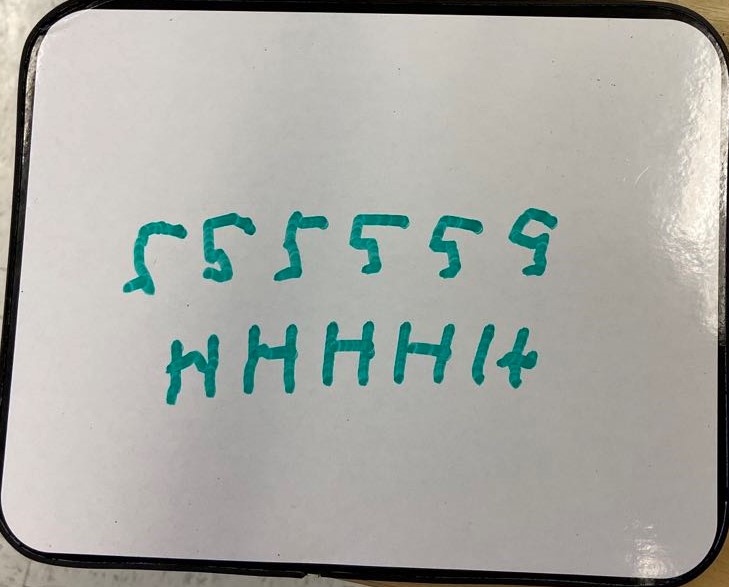
结构:通过PWM波的占空比控制四个伺服电机如图所示,伺服电机0控制水平运动,其他三个私服电机控制笔的偏移运动。硬件:74LC32进行电压转换软件:首先设计字符数据库,然后算出相应伺服电机的PWM占空比,用串行通信输入相应数据,结论:测试出理论工作范围,再进行测试与验证。 验证;