ConcurrentHashMap使用分段锁技术,将数据分成一段一段的存储,然后给每一段数据配一把锁,当一个线程占用锁访问其中一个段数据的时候,其他段的数据也能被其他线程访问,能够实现真正的并发访问。如下图是ConcurrentHashMap的内部结构图:
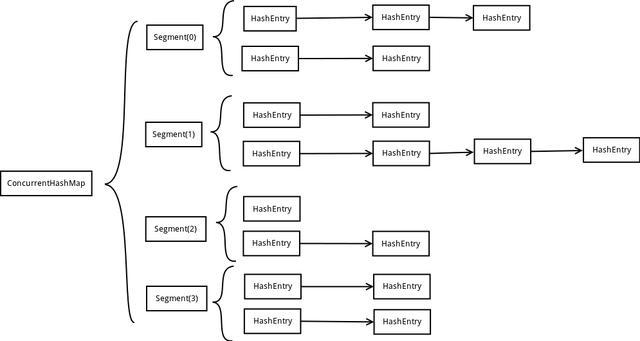
- 从上面的结构我们可以了解到,ConcurrentHashMap定位一个元素的过程需要进行两次Hash操作。
第一次Hash定位到Segment,第二次Hash定位到元素所在的链表的头部。
缺点:这一种结构的带来的副作用是Hash的过程要比普通的HashMap要长
优点:
写操作的时候可以只对元素所在的Segment进行加锁即可,不会影响到其他的Segment,这样,在最理想的情况下,ConcurrentHashMap可以最高同时支持Segment数量大小的写操作(刚好这些写操作都非常平均地分布在所有的Segment上)。
所以,通过这一种结构,ConcurrentHashMap的并发能力可以大大的提高。
- .Segment(分段锁)
ConcurrentHashMap中的分段锁称为Segment,它即类似于HashMap的结构,即内部拥有一个Entry数组,数组中的每个元素又是一个链表,同时又是一个ReentrantLock(Segment继承了ReentrantLock)。
以上是jdK1.7的原理。
下面JDK1.8
JDK8中ConcurrentHashMap参考了JDK8 HashMap的实现,采用了数组+链表+红黑树的实现方式来设计,内部大量采用CAS操作,这里我简要介绍下CAS。
CAS是compare and swap的缩写,即我们所说的比较交换。cas是一种基于锁的操作,而且是乐观锁。在java中锁分为乐观锁和悲观锁。悲观锁是将资源锁住,等一个之前获得锁的线程释放锁之后,下一个线程才可以访问。而乐观锁采取了一种宽泛的态度,通过某种方式不加锁来处理资源,比如通过给记录加version来获取数据,性能较悲观锁有很大的提高。
CAS 操作包含三个操作数 —— 内存位置(V)、预期原值(A)和新值(B)。如果内存地址里面的值和A的值是一样的,那么就将内存里面的值更新成B。CAS是通过无限循环来获取数据的,若果在第一轮循环中,a线程获取地址里面的值被b线程修改了,那么a线程需要自旋,到下次循环才有可能机会执行。
JDK8中彻底放弃了Segment转而采用的是Node,其设计思想也不再是JDK1.7中的分段锁思想。
Node:保存key,value及key的hash值的数据结构。其中value和next都用volatile修饰,保证并发的可见性。
Java8 ConcurrentHashMap结构基本上和Java8的HashMap一样,不过保证线程安全性。
在JDK8中ConcurrentHashMap的结构,由于引入了红黑树,使得ConcurrentHashMap的实现非常复杂,我们都知道,红黑树是一种性能非常好的二叉查找树,其查找性能为O(logN),但是其实现过程也非常复杂,而且可读性也非常差,DougLea的思维能力确实不是一般人能比的,早期完全采用链表结构时Map的查找时间复杂度为O(N),JDK8中ConcurrentHashMap在链表的长度大于某个阈值的时候会将链表转换成红黑树进一步提高其查找性能。
ps:用volatile修饰的变量,线程在每次使用变量的时候,都会读取变量修改后的最的值
- coucurrenthashmap底层采用分段的数组+链表实现,线程安全
- 通过把整个Map分为N个Segment,可以提供相同的线程安全,但是效率提升N倍,默认提升16倍。(读操作不加锁,由于HashEntry的value变量是 volatile的,也能保证读取到最新的值。)
- Hashtable的synchronized是针对整张Hash表的,即每次锁住整张表让线程独占,ConcurrentHashMap允许多个修改操作并发进行,其关键在于使用了锁分离技术
- 有些方法需要跨段,比如size()和containsValue(),它们可能需要锁定整个表而而不仅仅是某个段,这需要按顺序锁定所有段,操作完毕后,又按顺序释放所有段的锁
- 扩容:段内扩容(段内元素超过该段对应Entry数组长度的75%触发扩容,不会对整个Map进行扩容),插入前检测需不需要扩容,有效避免无效扩容

若有收获,就点个赞吧
0 人点赞
