1.同步和互斥
概念
互斥:是指某一资源同时只允许一个访问者对其进行访问,具有唯一性和排它性。但互斥无法限制访问者对资源的访问顺序,即访问是无序的。
同步:是指在互斥的基础上(大多数情况),通过其它机制实现访问者对资源的有序访问。
2.互斥问题的解决方法:
2.1互斥锁机制
互斥锁是用一种简单的加锁方法来控制对共享资源的访问,互斥锁有两种状态,上锁和解锁,可以把互斥锁看作成某种意义上的全局变量。在同一时刻只能有一个线程掌握这个互斥锁,拥有上锁状态的线程能够对共享资源按照顺序进行操作。若其他线程希望上锁一个已经被上锁的互斥锁,则该线程会被挂起,直到互斥锁被上锁的线程释放(解锁)。
互斥锁基本操作(独占)
1)申请初始化互斥锁:
静态化初始:pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER
动态化初始:
pthread_mutex_t mutex;
pthread_mutex_init (&mutex,NULL);//主线程
2)申请互斥锁(上锁)
int pthread_mutex_lock(&mutex ); //共享资源访问之前
3)释放互斥锁(解锁)
int pthread_mutex_unlock(&mutex );//共享资源访问结束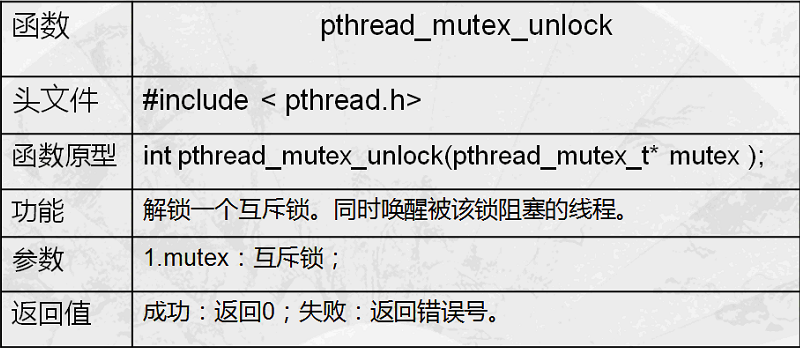
4)销毁互斥锁(释放锁)
int pthread_mutex_destroy(&mutex);//主线程

** 一般要加上线程清理函数,防止产生资源死锁状态,造成其他线程阻塞;清理函数中是释放锁资源** int pthread_mutex_destroy(&mutex);
2.2读写锁机制
读写锁(共享-独占锁):可以根据具体的资源访问方式,决定对共享资源是独占访问还是共享访问;
使用场景:多用于读操作频率高于写操作频率;


读写锁基本操作
1)申请初始化读写锁:
静态初始化:pthread_rwlock_t rwlock = PTHREAD_RWLOCK_INITIALIZER
动态初始化:
pthread_rwlock_t rwlock;
pthread_rwlock_init (&rwlock,NULL);//主线程 
2)读上锁:
int pthread_rwlock_rdlock(&rwlock ); //共享资源访问之前
3)写上锁:
int pthread_rwlock_wrlock(&rwlock ); //共享资源访问之前
4)释放锁:
int pthread_rwlock_unlock (&rwlock );
5)销毁锁:
int pthread_rwlock_destroy(&rwlock);
2.3条件变量机制
主要用于对共享资源进行有条件的访问;
条件变量主要是用来阻塞一个线程,条件变量允许线程以无竞争的方式等待条件的发生;
注意:条件变量必须搭配互斥锁一起使用,原因在于条件的检测是必须在互斥锁的保护下进行;
条件变量的使用:
1.由主线程申请初始化条件变量;
2.子线程如果对共享资源由条件访问,判断条件,条件并不成立,利用条件变量阻塞线程;
3.子线程如果对共享资源的访问,同时修改条件,对条件变量进行通知唤醒被条件变量阻塞的线程;
4.由主线程回收条件变量;
条件变量的操作
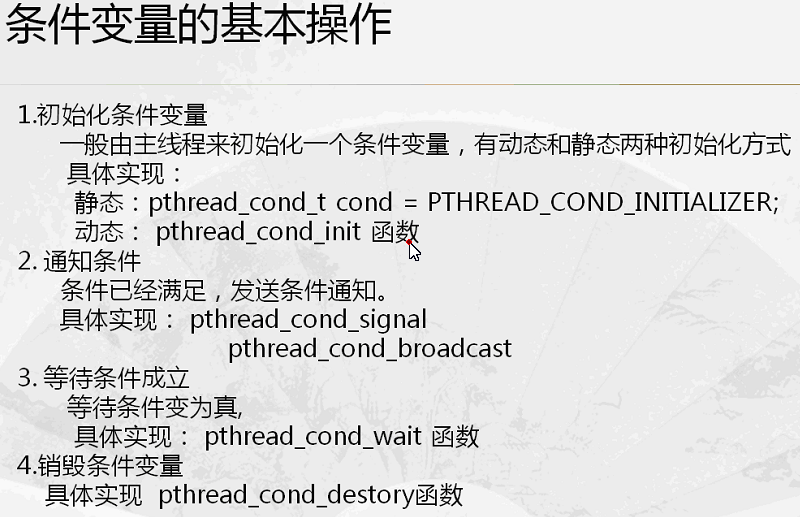1) 申请初始化条件变量: <br /> 静态初始化:pthread_cond_t rwlock = PTHREAD_COND_INITIALIZER;<br /> 动态初始化:<br /> pthread_cond_t cond;<br /> pthread_cond_init(&cond,NULL); //主线程<br />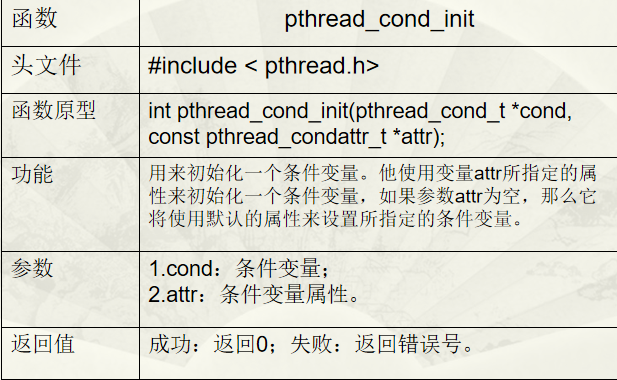<br /> 2) 等待条件变量: <br />pthread_cond_wait(&cond,&mutex); //读线程共享资源访问前<br />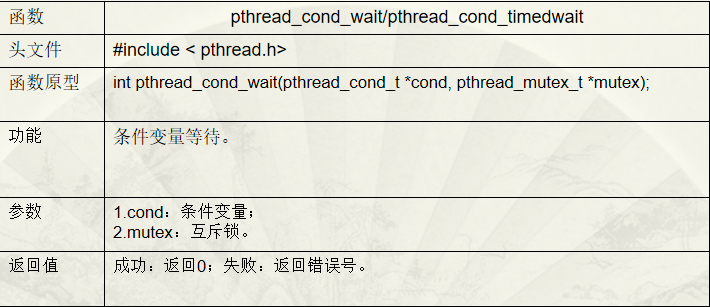<br /> 3) 通知条件变量: <br />pthread_cond_signal(&cond); //写线程共享资源访问前<br /> pthread_cond_broadcast(&cond);<br /> 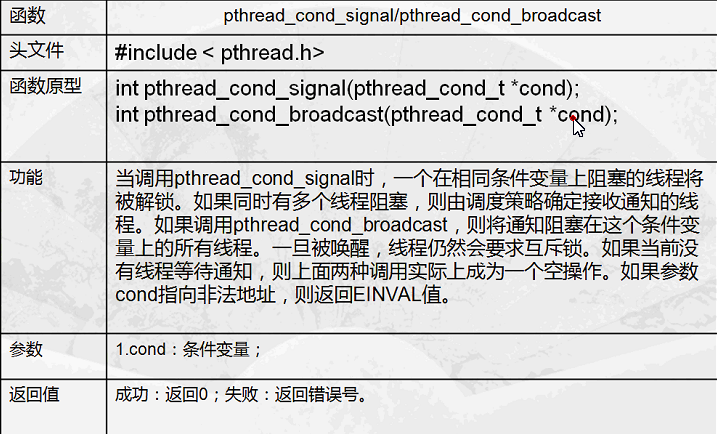<br /> <br /> 5) 释放条件变量: pthread_cond_destroy(&cond); //主线程<br />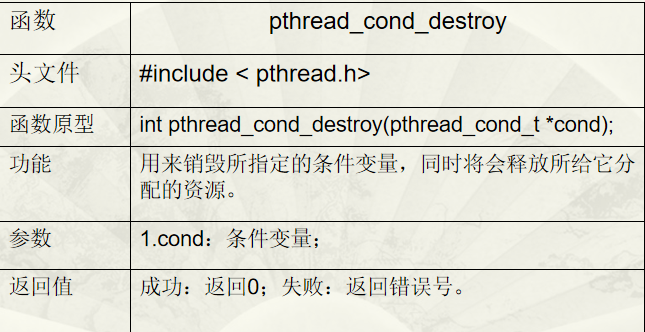
相关编程接口函数

若有收获,就点个赞吧
0 人点赞
