树的重心
#include <iostream>#include <string>#include <cstring>#define rep(x,y) for(ull i = (x);i<=(y);i++)using namespace std;typedef long long ll;typedef unsigned long long ull;typedef pair<ll,ll> pii;const int maxn = 1e6+10;int N,a,b;int res = maxn;//初始化为最大值int e[maxn],h[maxn],ne[maxn],idx;//使用数组模拟的方式来做,速度快一倍bool vis[maxn];//访问标记数组void add(int a,int b){ //头插法加边e[idx] = b;ne[idx] = h[a];h[a] = idx++;}//返回u子树的结点个数int DFS(int u){vis[u] = 1;//添加已经访问了int sum = 1,m = 0; //sum计算u子树的总结点数,m记录把s结点删除后,个联通分量最大的结点数for(int i = h[u];i!=-1;i = ne[i]){int j = e[i];if(!vis[j]){int s = DFS(j);sum+=s;m = max(m,s);}}m = max(m,N-sum);//计算除了u子树以外的联通分量res = min(res,m);//更新最小值return sum;}int main(){memset(h,-1,sizeof h);cin>>N;rep(1,N){cin>>a>>b;add(a,b);add(b,a);}DFS(1);cout<<res;return 0;}
拓扑排序
#include <iostream>
#include <map>
#include <algorithm>
#include <unordered_map>
#include <string>
#include <cstring>
#include <queue>
#include <cmath>
#include <cstdio>
#include <cstdlib>
#include <stack>
#include <bitset>
#define all(v) (v).begin(),(v).end()
#define rep(x,y) for(ull i = (x);i<=(y);i++)
#define pb(x) push_back((x))
#define pi acos(-1)
using namespace std;
typedef long long ll;
typedef unsigned long long ull;
typedef pair<ll,ll> pii;
const int maxn = 1e6+10;
int N,M,a,b;
int h[maxn],e[maxn],ne[maxn],idx;//使用数组模拟邻接表
int cnt[maxn]; //记录每个点的入度数量
int q[maxn],hh = 0,tt = -1;//使用数组模拟队列,可以记录下入队顺序,速度还快
void add(int a,int b){ //头插法插入一条边
e[idx] = b;
ne[idx] = h[a];
h[a] = idx;
idx++;
}
void topsort(){ //拓扑排序
for(int i = 1;i<=N;i++){ //先放入入度为0的点
if(cnt[i] == 0) q[++tt] = i;
}
while(hh<=tt){
int t = q[hh++];
for(int i = h[t];i!=-1;i = ne[i]){
int j = e[i];
cnt[j]--;
if(cnt[j] == 0){ //实时判断是否有新的入度为0的点
q[++tt] = j;
}
}
}
if(hh == N) //条件成立->所有点都入队出队了
for(int i = 0;i<hh;i++) cout<<q[i]<<" "; //输入队的顺序
else
cout<<-1;
}
int main(){
memset(h,-1,sizeof h);//初始化邻接表
cin>>N>>M;
rep(1,M){
cin>>a>>b;
add(a,b);
cnt[b]++;
}
topsort();
return 0;
}
最短路
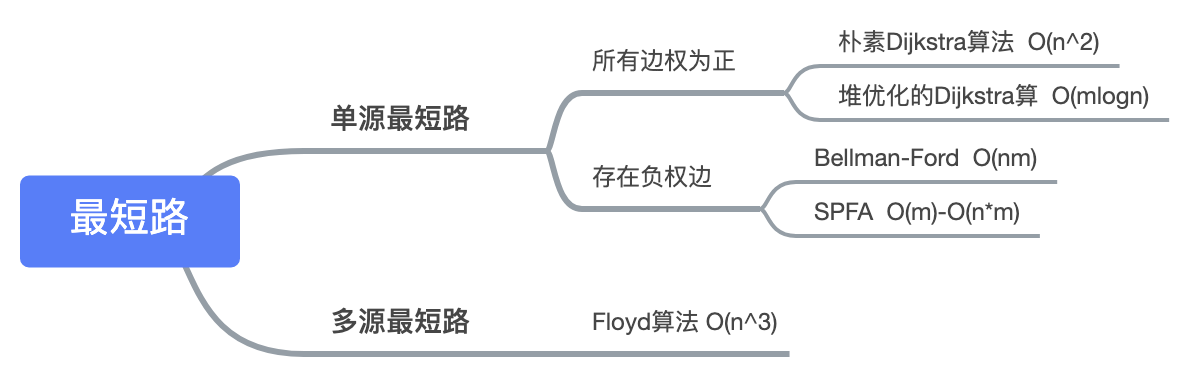 朴素的Dijkstra算法适用与稠密图,因为他只与点数有关
朴素的Dijkstra算法适用与稠密图,因为他只与点数有关
堆优化版的适用有稀疏图,如果用来处理稠密图时间复杂度会变成 O(n^2logn)
多源最短路:多次询问两点的最短距离
Bellman-Ford:可以处理要求不超过k条边的最短路问题
Bellman-Ford和SPFA可以在没有负环情况下求最短路问题,也可以判断一个图中是否存在负环,SPFA是Bellman-Ford的优化版,效率更高。
拓展:Dijkstra基于贪心,Ford基于动态规划
朴素Dijkstra算法
#pragma GCC optimize(2)
#include <iostream>
#include <cstring>
using namespace std;
typedef long long ll;
typedef unsigned long long ull;
const int maxn = 1e3+10;
int N,M,a,b,w;
int G[maxn][maxn];
int vis[maxn],dis[maxn];
int Dijkstra(){ //循环点N次,循环边M次,时间复杂度O(N*M)
memset(dis,0x3f,sizeof dis);
dis[1] = 0;
for(int i = 1;i<=N;i++){ // 循环N个顶点
int s = -1;
for(int j = 1;j<=N;j++){ //寻找当前已知的最短路径点,并且没有访问过
if(!vis[j] && (s == -1 || dis[j] < dis[s]))
s = j;
}
for(int j = 1;j<=N;j++){ //去更新已知最短点周围的点
dis[j] = min(dis[j],dis[s]+G[s][j]);
}
vis[s] = 1;
}
if(dis[N] == 0x3f3f3f3f) return -1;
return dis[N];
}
int main(){
cin>>N>>M;
memset(G,0x3f,sizeof G);
while(M--){
cin>>a>>b>>w;
G[a][b] = min(G[a][b],w);//因为题目中说了会有重边,所以就保存最短的那一条即可
}
cout<<Dijkstra();
return 0;
}
堆优化版的Dijkstra算法
#pragma GCC optimize(2)
#include <iostream>
#include <cstring>
#include <stdio.h>
#include <cstdlib>
#include <algorithm>
#include <string>
#include <cmath>
#include <vector>
#include <map>
#include <set>
#include <unordered_map>
#include <queue>
#define all(v) (v).begin(),(v).end()
#define rep(x,y) for(ull i = (x);i<=(y);i++)
using namespace std;
typedef long long ll;
typedef unsigned long long ull;
typedef pair<int,int> pii;
const int maxn = 1e6+10;
int N,M,a,b,c;
int h[maxn],e[maxn],w[maxn],ne[maxn],idx;//头节点表,编号表,权值表,链表
bool vis[maxn];int dis[maxn];//访问标记数组,距离数组
priority_queue<pii,vector<pii>,greater<pii> > heap;//堆,用堆去找目前距离最短的点(未访问过)
void add(int a,int b,int c){
e[idx] = b,w[idx] = c,ne[idx] = h[a],h[a] = idx++;
}
int Dijkstra(){
memset(dis,0x3f,sizeof dis);
heap.push({0,1});//第一个是距离,第二个是编号
dis[1] = 0;
while(heap.size()){
auto p = heap.top();heap.pop(); //找距离距离最短的点
int d = p.first,s = p.second;
if(vis[s]) continue;//如果已经访问过
vis[s] = true;
for(int i = h[s];i != -1;i = ne[i]){// i为地址
int j = e[i]; //j是编号
if(d+w[i] < dis[j]){
dis[j] = d+w[i];
heap.push({dis[j],j});
}
}
}
if(dis[N] == 0x3f3f3f3f) return -1;
return dis[N];
}
int main(){
ios::sync_with_stdio(0);
cin.tie(0);
cout.tie(0);
memset(h,-1,sizeof h);//初始化邻接表
cin>>N>>M;
while(M--){
cin>>a>>b>>c;
add(a,b,c);
}
cout<<Dijkstra();
return 0;
}
Bellman-Ford算法
可以处理含负权边的图,可以处理对最短路径有边数限制条件的情况(独有)
验证是否负权环:对每条边都进行松弛操作。之后如果还能有一条边能进行松弛,那么就返回False,否则算法返回True。(但一般判断负环因其时间复杂度比较高不用Bellman-Ford算法,二用SPFA算法)
#pragma GCC optimize(2)
#include <iostream>
#include <cstring>
#include <stdio.h>
#include <cstdlib>
#include <algorithm>
#include <string>
#include <cmath>
#include <vector>
#include <map>
#include <set>
#include <unordered_map>
#include <queue>
#define all(v) (v).begin(),(v).end()
#define rep(x,y) for(ull i = (x);i<=(y);i++)
#define pb(x) push_back((x))
using namespace std;
typedef long long ll;
typedef unsigned long long ull;
typedef pair<int,int> pii;
const int maxn = 1e6+10;
int dir[8][2] = {-1,0,1,0,0,1,0,-1,-1,-1,-1,1,1,-1,1,1};
int dir2[4][2] = {0,1,1,0,0,-1,-1,0};
const ll eps = -3000;
int N,M,K,a,b,c;//N个顶点,M条边,最短路径不能超过K条边
struct node{
int a,b,w;
}edges[maxn];
int idx;
int dis[510],backup[510];//距离数组及其备份
int bellman_ford(){
memset(dis,0x3f,sizeof dis);
dis[1] = 0;
for(int i = 0;i<K;i++){
memcpy(backup,dis,sizeof dis); //使用备份来更新,可以保证下面的for循环每次只会在原来路径上扩展一条边
//如果不用备份, 那么可能更新中会出现最短路径边数大于K的情况
for(int j = 0;j<M;j++){
int a = edges[j].a,b = edges[j].b,w = edges[j].w;
if(backup[a] == 0x3f3f3f3f) continue;//不能用无穷大来扩展路径
dis[b] = min(dis[b],backup[a]+w);
}
}
return dis[N] == 0x3f3f3f3f ? -1:dis[N];
}
int main(){
cin>>N>>M>>K;
rep(1,M){
cin>>a>>b>>c;
edges[idx++] = {a,b,c};
}
int r = bellman_ford();
if(r!=-1) cout<<r;
else cout<<"impossible";
return 0;
}
SPFA
用于求最短路时间复杂度比Bellman-ford低
#pragma GCC optimize(2)
#include <iostream>
#include <cstring>
#include <stdio.h>
#include <cstdlib>
#include <algorithm>
#include <string>
#include <cmath>
#include <vector>
#include <map>
#include <set>
#include <unordered_map>
#include <queue>
#define all(v) (v).begin(),(v).end()
#define rep(x,y) for(ull i = (x);i<=(y);i++)
#define pb(x) push_back((x))
using namespace std;
typedef long long ll;
typedef unsigned long long ull;
typedef pair<int,int> pii;
const int maxn = 1e6+10;
int dir[8][2] = {-1,0,1,0,0,1,0,-1,-1,-1,-1,1,1,-1,1,1};
int dir2[4][2] = {0,1,1,0,0,-1,-1,0};
const ll eps = -3000;
int N,M,a,b,c;
int h[maxn],e[maxn],w[maxn],ne[maxn],idx;
bool vis[maxn];
int dis[maxn];
queue<int> q;
void add(int a,int b,int c){
e[idx] = b,w[idx] =c,ne[idx] = h[a],h[a] = idx++;
}
int SPFA(){ //思路:就是只有dis[t]+w[i] < dis[j]成立才去更新j周围的邻接点。
memset(dis,0x3f,sizeof dis);
q.push(1);
vis[1] = 1;
dis[1] = 0;
while(q.size()){
int t = q.front();q.pop();
vis[t] = 0;
for(int i = h[t];i!=-1;i = ne[i]){
int j = e[i];
if(dis[t]+w[i] < dis[j]){
dis[j] = dis[t]+w[i];
if(!vis[j]){ //因为队列中仅仅是保存结点编号,更新是在dis数组中,所以在队列中的编号就不用重复入队了
q.push(j);
vis[j] = 1;
}
}
}
}
if(dis[N]!= 0x3f3f3f3f) return dis[N];
return -1;
}
int main(){
memset(h,-1,sizeof h);
cin>>N>>M;
rep(1,M){
cin>>a>>b>>c;
add(a,b,c);
}
int r = SPFA();
if(r == -1) cout<<"impossible";
else cout<<r;
return 0;
}
SPFA算法判断图是否有负环
#pragma GCC optimize(2)
#include <iostream>
#include <cstring>
#include <stdio.h>
#include <cstdlib>
#include <algorithm>
#include <string>
#include <cmath>
#include <vector>
#include <map>
#include <set>
#include <unordered_map>
#include <queue>
#define all(v) (v).begin(),(v).end()
#define rep(x,y) for(ull i = (x);i<=(y);i++)
#define pb(x) push_back((x))
using namespace std;
typedef long long ll;
typedef unsigned long long ull;
typedef pair<int,int> pii;
const int maxn = 1e6+10;
int dir[8][2] = {-1,0,1,0,0,1,0,-1,-1,-1,-1,1,1,-1,1,1};
int dir2[4][2] = {0,1,1,0,0,-1,-1,0};
const ll eps = -3000;
int N,M,a,b,c;
int h[maxn],e[maxn],w[maxn],ne[maxn],idx;
bool vis[maxn];
int dis[maxn],cnt[maxn];
queue<int> q;
void add(int a,int b,int c){
e[idx] = b,w[idx] = c,ne[idx] = h[a],h[a] = idx++;
}
int SPFA(){
rep(1,N) q.push(i),vis[i] = 1;
while(q.size()){
int t = q.front();q.pop();
vis[t] = 0;
for(int i = h[t];i!=-1;i = ne[i]){
int j = e[i];
if(dis[t]+w[i] < dis[j]){
dis[j] = dis[t]+w[i];
cnt[j] = cnt[t]+1;
if(cnt[j]>=N) return 1; //基于抽屉原理,如果没有负环最长的边为N-1,而更新是变小,N条边的路径说明有两个
//点是同一个点,说明有负权环
if(!vis[j]){
q.push(j);
vis[j] = 1;
}
}
}
}
return 0;
}
int main(){
memset(h,-1,sizeof h);
cin>>N>>M;
rep(1,M){
cin>>a>>b>>c;
add(a,b,c);
}
int r = SPFA();
if(r) cout<<"Yes";
else cout<<"No";
return 0;
}
floyd算法
#include <iostream>
#include <map>
#include <algorithm>
#include <unordered_map>
#include <string>
#include <cstring>
#include <queue>
#include <cmath>
#include <cstdio>
#include <cstdlib>
#include <stack>
#include <bitset>
#define all(v) (v).begin(),(v).end()
#define rep(x,y) for(ull i = (x);i<=(y);i++)
#define rep2(x,x2,y,y2,G) for(ull i = (x);i<=(x2);i++) {for(ull j = (y);j<=(y2);j++) cout<<G[i][j]<<" ";cout<<endl;}
#define pb push_back
#define pi acos(-1)
using namespace std;
typedef long long ll;
typedef unsigned long long ull;
typedef pair<double,string> pii;
const int maxn = 1e6+10;
const int P = 131;
const int inf = 0x3f3f3f3f;
int dir8[8][2] = {1,1,1,-1,-1,1,-1,-1,1,0,0,1,-1,0,0,-1};
int dir4[4][2] = {0,1,1,0,0,-1,-1,0};
int N,M,K,a,b,c;
int G[210][210];
void floyd(){ //基于动态规划,类似于离散数学中的wallshall算法
for(int k = 1;k<=N;k++)
for(int i = 1;i<=N;i++)
for(int j = 1;j<=N;j++)
G[i][j] = min(G[i][j],G[i][k]+G[k][j]);
}
int main(){
cin>>N>>M>>K;
for(int i = 1;i<=N;i++) //初始化点到点的距离
for(int j = 1;j<=N;j++)
if(i == j) G[i][j] = 0;
else G[i][j] = inf;
while(M--){
cin>>a>>b>>c;
G[a][b] = min(G[a][b],c);
}
floyd();
while(K--){
cin>>a>>b;
if(G[a][b] > inf/2) cout<<"impossible\n";//因为有负权边
else cout<<G[a][b]<<endl;
}
return 0;
}
最小生成树

边权正负都可以
堆优化版堆prim用的特别少,不用掌握
朴素版prime用于稠密图,kruskal用于稀疏图
prim算法
#pragma GCC optimize(2)
#include <iostream>
#include <cstring>
#include <stdio.h>
#include <cstdlib>
#include <algorithm>
#include <string>
#include <cmath>
#include <vector>
#include <map>
#include <set>
#include <unordered_map>
#include <queue>
#define all(v) (v).begin(),(v).end()
#define rep(x,y) for(ull i = (x);i<=(y);i++)
#define pb(x) push_back((x))
using namespace std;
typedef long long ll;
typedef unsigned long long ull;
typedef pair<int,int> pii;
const int maxn = 1e3+10;
const int inf = 0x3f3f3f3f;
int dir[8][2] = {-1,0,1,0,0,1,0,-1,-1,-1,-1,1,1,-1,1,1};
int dir2[4][2] = {0,1,1,0,0,-1,-1,0};
const ll eps = -3000;
int N,M,a,b,c;
int G[maxn][maxn],dis[maxn];
bool vis[maxn];
int prim(){
memset(dis,0x3f,sizeof dis);
int res = 0;//最小生成树的权值和
for(int i = 0;i<N;i++){
int t = -1;
for(int j = 1;j<=N;j++){
if(!vis[j] && (t == -1 || dis[j] < dis[t])){
t = j;
}
}
if(i && dis[t] == inf) return inf;//第一次的结点距离不用算,所以跳过第一次,也就是i==0的时候
if(i) res+=dis[t]; //第一次的距离不用加
vis[t] = true;
for(int j = 1;j<=N;j++) dis[j] = min(dis[j],G[t][j]); //用新加入的点去更新其他点
}
return res;
}
int main(){
memset(G,0x3f,sizeof G);
cin>>N>>M;
while(M--){
cin>>a>>b>>c;
G[a][b] = G[b][a] = min(G[a][b],c);
}
int r = prim();
if(r == inf) cout<<"impossible\n";
else cout<<r<<endl;
return 0;
}
克鲁斯卡尔算法
#pragma GCC optimize(2)
#include <iostream>
#include <cstring>
#include <stdio.h>
#include <cstdlib>
#include <algorithm>
#include <string>
#include <cmath>
#include <vector>
#include <map>
#include <set>
#include <unordered_map>
#include <queue>
#define all(v) (v).begin(),(v).end()
#define rep(x,y) for(ull i = (x);i<=(y);i++)
#define pb(x) push_back((x))
using namespace std;
typedef long long ll;
typedef unsigned long long ull;
typedef pair<int,int> pii;
const int maxn = 1e6+10;
const int inf = 0x3f3f3f3f;
int dir[8][2] = {-1,0,1,0,0,1,0,-1,-1,-1,-1,1,1,-1,1,1};
int dir2[4][2] = {0,1,1,0,0,-1,-1,0};
const ll eps = -3000;
int N,M,a,b,w;//N:点数 M:边数
int fa[maxn];
struct edge{
int a,b,w;
bool operator <(const edge& other) const{
return w<other.w;
}
}edges[maxn];
int find(int x){
if(x != fa[x]) fa[x] = find(fa[x]);
return fa[x];
}
void join(int x,int y){
int fx = find(x),fy = find(y);
if(fx!=fy) fa[fx] = fy;
}
int main(){
cin>>N>>M;
rep(1,N) fa[i] = i;//并查集初始化
rep(0,M-1){
cin>>a>>b>>w;
edges[i] = {a,b,w};
}
sort(edges,edges+M);
int res = 0,cnt = 0;
for(int i = 0;i<M;i++){
a = edges[i].a,b = edges[i].b,w = edges[i].w;
if(find(a) != find(b)){ //是否联通
join(a,b);
res+=w;//生成树的权值和
cnt++;//边的计数
}
}
if(cnt!=N-1) cout<<"impossible\n"; //最小生成树的边为N-1
else cout<<res<<endl;
return 0;
}
二分图

二分图判定算法
#pragma GCC optimize(2)
#include <iostream>
#include <cstring>
#include <stdio.h>
#include <cstdlib>
#include <algorithm>
#include <string>
#include <cmath>
#include <vector>
#include <map>
#include <set>
#include <queue>
#define all(v) (v).begin(),(v).end()
#define rep(x,y) for(ull i = (x);i<=(y);i++)
#define pb push_back
using namespace std;
typedef long long ll;
typedef unsigned long long ull;
typedef pair<int,int> pii;
const int maxn = 1e6+10;
const int inf = 0x3f3f3f3f;
int dir8[8][2] = {-1,0,1,0,0,1,0,-1,-1,-1,-1,1,1,-1,1,1};
int dir4[4][2] = {0,1,1,0,0,-1,-1,0};
char dir4show[4] = {'r','d','l','u'};
const double eps = 1e-6;
int T,N,M,a,b;
bool ok;
vector<int> h[2100];
int col[2100];
//用0和1来染色
void DFS(int s){ //用DFS来染色会比BFS速度快很多
if(!ok) return ;
for(int i = 0;i<h[s].size();i++){
int j = h[s][i];
if(col[j] == -1){
col[j] = col[s]^1;//染和s结点相反的颜色
DFS(j);
}else if(col[j] == col[s]){ //如果已经和结点s颜色相同了,那么必定不是二分图
ok = false;
return;
}
}
}
int main(){
scanf("%d",&T);
int kase = 0;
while(T--){
printf("Scenario #%d:\n",++kase);
cin>>N>>M;
memset(col,-1,sizeof col);//初始化染色标记数组
for(int i = 1;i<=N;i++) h[i].clear();//清空邻接表
ok = true;
while(M--){
scanf("%d%d",&a,&b);
h[a].pb(b);
h[b].pb(a);
}
for(int i = 1;i<=N && ok;i++){ //对每个未染色点都进行DFS,因为可能有多个联通分量
if(col[i] == -1){
col[i] = 0;
DFS(i);
}
}
if(ok) printf("No suspicious bugs found!\n");
else printf("Suspicious bugs found!\n");
if(T) puts("");
}
return 0;
}
匈牙利算法
主要就是解决二分图最大匹配问题
#include <iostream>
#include <map>
#include <algorithm>
#include <unordered_map>
#include <string>
#include <cstring>
#include <queue>
#include <cmath>
#include <cstdio>
#include <cstdlib>
#include <stack>
#include <bitset>
#define all(v) (v).begin(),(v).end()
#define rep(x,y) for(ull i = (x);i<=(y);i++)
#define rep2(x,x2,y,y2,G) for(ull i = (x);i<=(x2);i++) {for(ull j = (y);j<=(y2);j++) cout<<G[i][j]<<" ";cout<<endl;}
#define pb push_back
#define pi acos(-1)
using namespace std;
typedef long long ll;
typedef unsigned long long ull;
typedef pair<double,string> pii;
const int maxn = 1e6+10;
const int P = 131;
const int inf = 0x3f3f3f3f;
int dir8[8][2] = {1,1,1,-1,-1,1,-1,-1,1,0,0,1,-1,0,0,-1};
int dir4[4][2] = {0,1,1,0,0,-1,-1,0};
int n1,n2,k,a,b;
int h[maxn],e[maxn],ne[maxn],idx;
int match[maxn];//妹子成功匹配的男生
bool st[maxn];//某个男生喜欢的妹子
void add(int a,int b){
e[idx] = b,ne[idx] = h[a],h[a] = idx++;
}
bool find(int x){
for(int i = h[x];i!=-1;i = ne[i]){
int j = e[i]; //j只会是x所喜欢的妹子
if(!st[j]){ //如果x还没有尝试去争取j,就去尝试一下,要么j还没有匹配match,要么当前和j匹配好的男生可以找到下一家
st[j] = true;
if(match[j] == 0 || find(match[j])){
match[j] = x;
return true;
}
}
}
return false;
}
int main(){
memset(h,-1,sizeof h);
cin>>n1>>n2>>k;
rep(1,k){
cin>>a>>b;
add(a,b);
}
int res = 0;
for(int i = 1;i<=n1;i++){ //遍历所有男生
memset(st,false,sizeof st);//开始所有妹子都可以去争取
if(find(i)) res++;//如果找到了,就匹配+1
}
cout<<res<<endl;
return 0;
}

若有收获,就点个赞吧
0 人点赞
