平衡因子(Balance Factor):某节点的左右子树的高度差(平衡因子 = 节点左树高度 - 节点右树高度)
AVL树的特点:
- 每个节点的平衡因子只可能是1、0、-1(绝对值 <= 1,如果超过1,称之为失衡)
- 每个节点的左右子树高度差不超过1
- 搜索、添加、删除的时间复杂度是O(logn)
会导致失衡的原因有两种:添加节点、删除节点
添加失去平衡:
- 最坏的情况下,可能会导致所有祖先节点都失衡;
父节点、非祖先节点,都不可能失衡(添加节点一定是在叶子节点进行)
删除失衡:
只可能会导致父节点或祖先节点失衡,但只有一个节点会失衡 ;
- 除了父节点以外的其他节点,都不可能失衡;
-
平均时间复杂度:
搜索:O(logn);
- 添加:O(logn),仅需要O(1)次的旋转操作;
- 搜索:O(logn),最多需要O(logn)次的旋转操作;
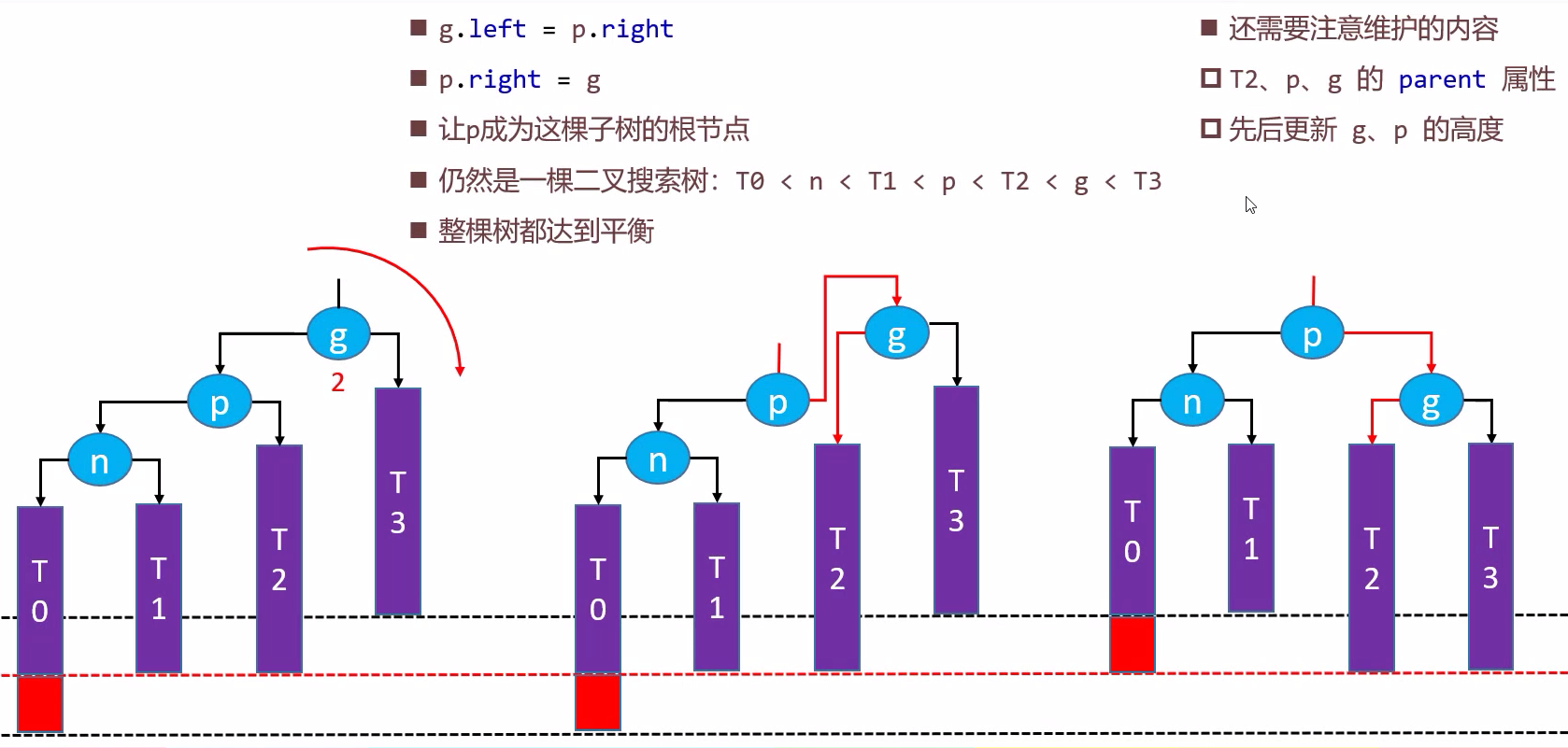
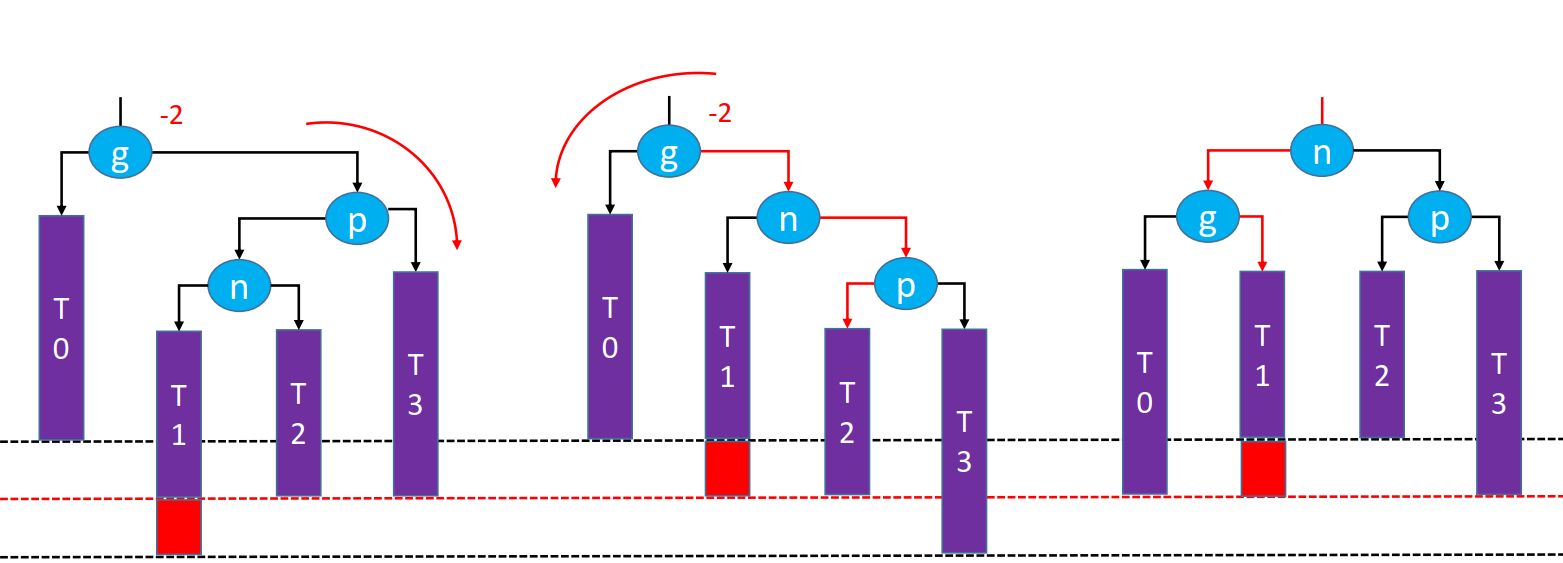
失衡后进行恢复:
LL、RR、LR、RL 指最终失衡节点的路径;
如下图,添加的红色节点为n下子节点,而n为p的左子树节点,且p为g的左子树节点,故为LL ( Left-Left )
方案1:根据路径不同,进行不同处理
LL - 右旋转(单旋)
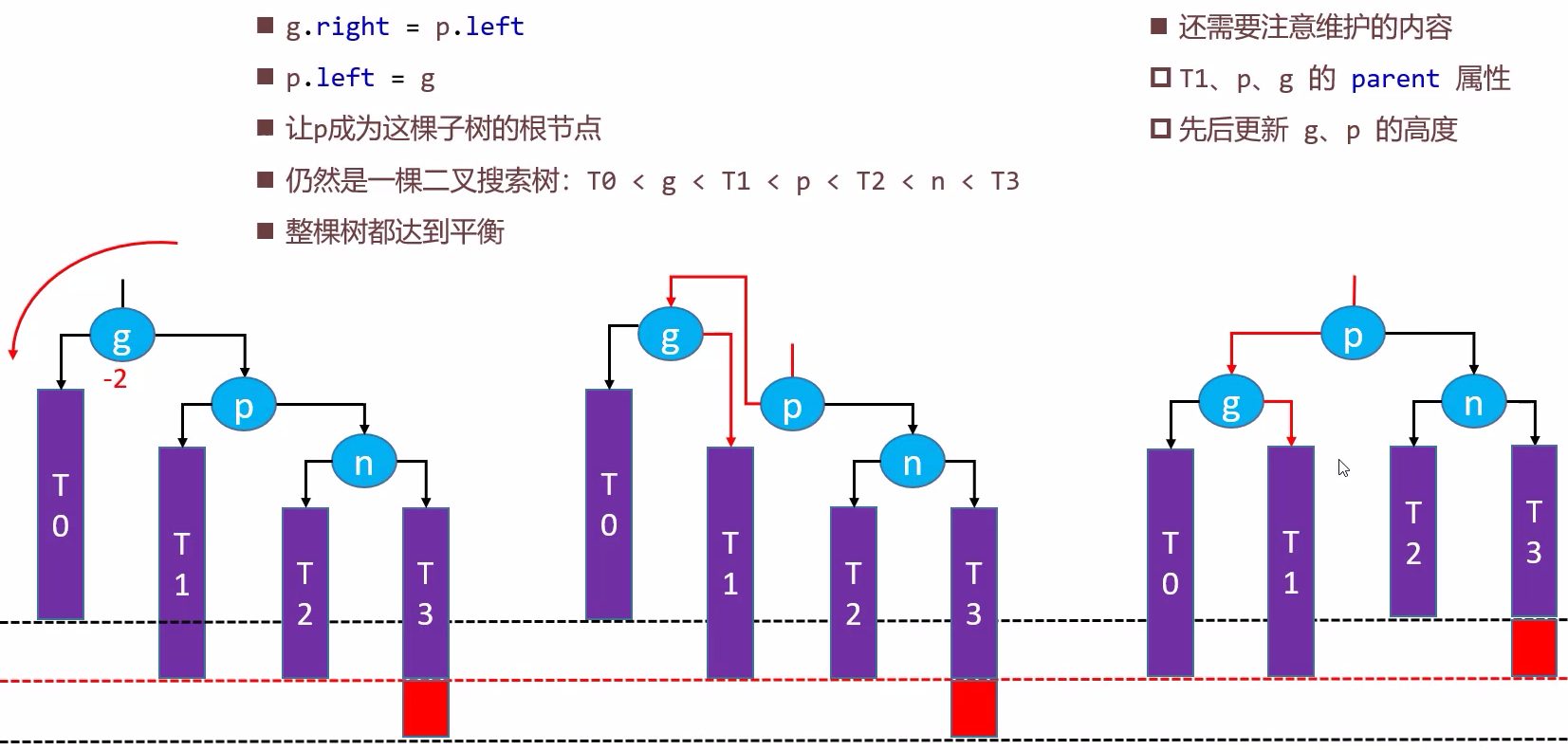
RR - 左旋转(单旋)
LR - RR左旋转,LL右旋转(双旋)
- 先执行左旋转,然后再执行右旋转(左旋后会发现,情况与右旋问题一致,故最后是右旋)
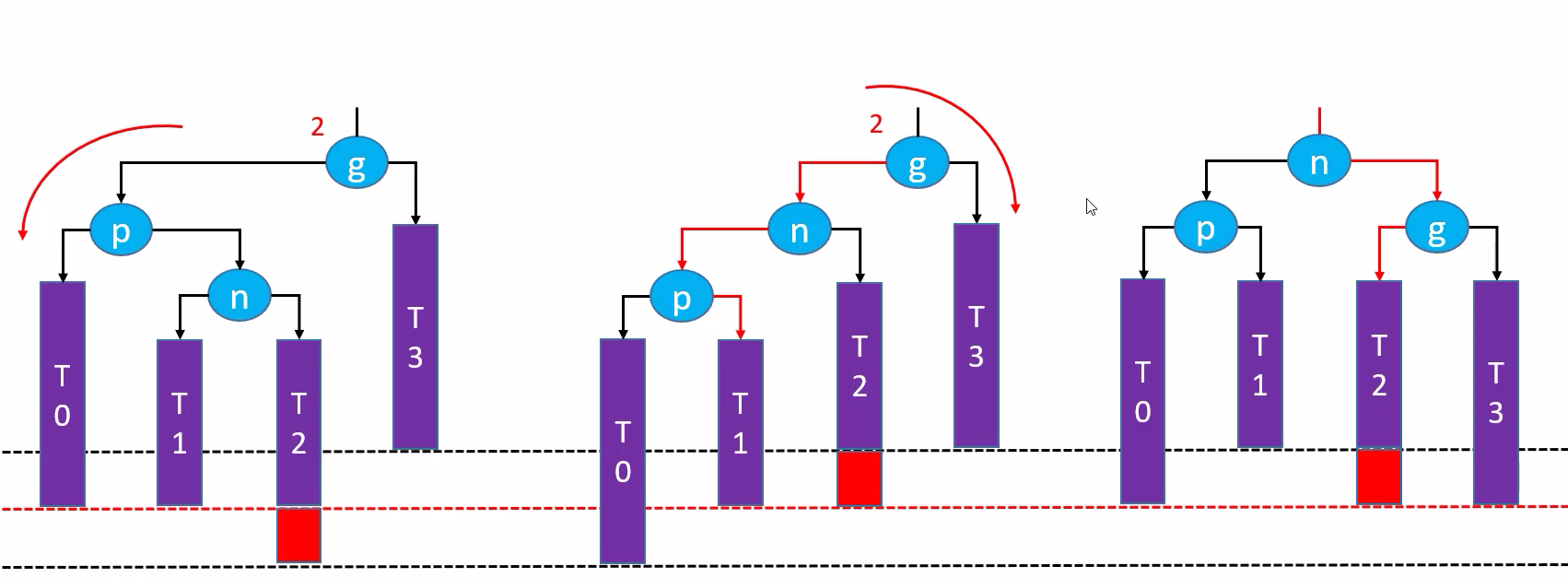
RL - LL右旋转,RR左旋转(双旋)
- 如上类似
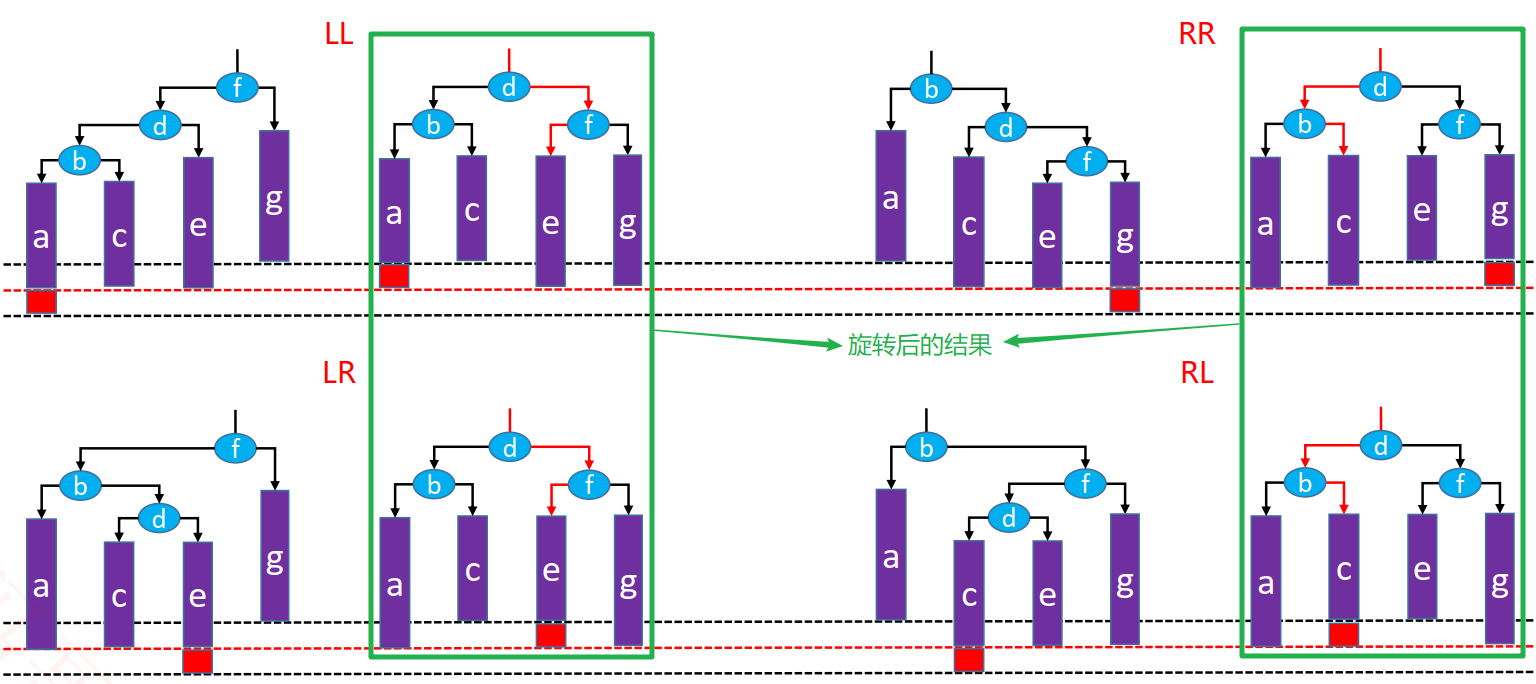
方案2:根据结果特征,统一操作
从图中可看出,将不平衡涉及的节点以及子树进行了分块:a、b、c、d、e、f、g,并得出以下特征:
- 旋转前,分块从小到大分块(即从做到右);
- 旋转后,d始终是根节点,且b、f始终是d的左、右子树的根节点;
- 旋转后,a - b - c、e - f - g、b - d - f分别组成一颗子树;

若有收获,就点个赞吧
0 人点赞
